探索路径规划:人工势场法及其他算法的 Matlab 实现
人工势场法的核心思想是把机器人在环境中的运动想象成在一种虚拟的力场中移动。就好比在一个充满了引力和斥力的世界里,目标点会对机器人产生引力,吸引它靠近;而障碍物则会产生斥力,把机器人推开。通过合力的作用,机器人就能规划出一条避开障碍物到达目标的路径。
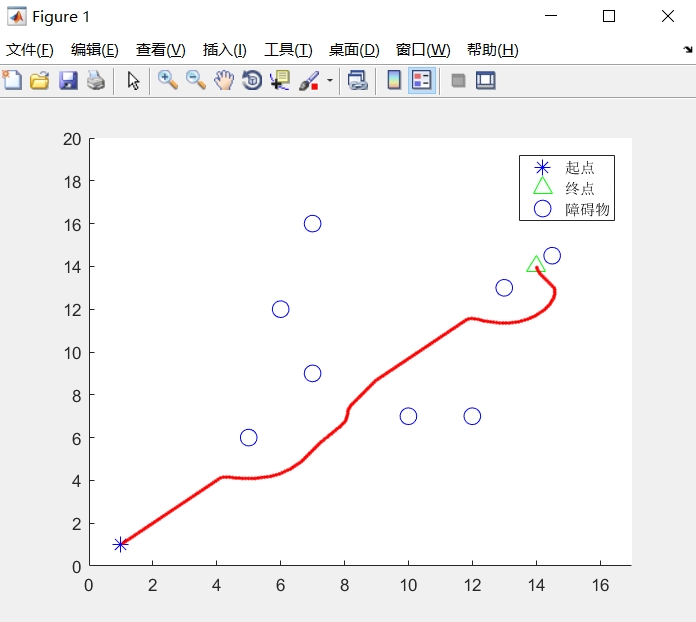
人工势场法路径规划matlab代码,下图为人工势场法,人工势场法改进。 内容包括两种方法编写人工势场法,注释挺详细的,还有文档对公式方法进行解释。 还有A*,rrt等代码。
在机器人路径规划领域,有许多经典且实用的算法,今天咱们就来聊聊人工势场法,顺便也提提 A*、RRT 等算法,并且会结合 Matlab 代码来深入探究。
人工势场法简介
人工势场法的核心思想是把机器人在环境中的运动想象成在一种虚拟的力场中移动。就好比在一个充满了引力和斥力的世界里,目标点会对机器人产生引力,吸引它靠近;而障碍物则会产生斥力,把机器人推开。通过合力的作用,机器人就能规划出一条避开障碍物到达目标的路径。
传统人工势场法的 Matlab 实现
下面是一段简单的传统人工势场法的 Matlab 代码:
% 初始化参数
start = [0, 0]; % 起始点
goal = [10, 10]; % 目标点
obstacles = [3, 3; 6, 6]; % 障碍物位置
step_size = 0.1; % 步长
max_iter = 1000; % 最大迭代次数
% 初始化路径
path = start;
current = start;
for iter = 1:max_iter
% 计算引力
attractive_force = (goal - current) / norm(goal - current);
% 计算斥力
repulsive_force = [0, 0];
for i = 1:size(obstacles, 1)
dist = norm(current - obstacles(i, :));
if dist < 1 % 障碍物影响范围
repulsive_force = repulsive_force + (1 / dist^2) * (1/dist - 1) * (current - obstacles(i, :)) / dist;
end
end
% 计算合力
total_force = attractive_force + repulsive_force;
% 更新当前位置
current = current + step_size * total_force;
% 记录路径
path = [path; current];
% 判断是否到达目标
if norm(current - goal) < step_size
break;
end
end
% 绘制路径
plot(path(:, 1), path(:, 2), '-o');
hold on;
plot(start(1), start(2), 'go', 'MarkerSize', 10);
plot(goal(1), goal(2), 'ro', 'MarkerSize', 10);
plot(obstacles(:, 1), obstacles(:, 2), 'ks', 'MarkerSize', 10);
hold off;代码分析
- 参数初始化:首先我们定义了起始点、目标点、障碍物位置、步长和最大迭代次数。这些参数会影响路径规划的结果,比如步长太大可能会导致机器人错过目标,步长太小则会增加计算时间。
- 引力计算:引力的方向是从当前位置指向目标点,大小为单位向量。这就好比目标点像一块磁铁,一直吸引着机器人。
- 斥力计算:对于每个障碍物,我们计算它对机器人的斥力。斥力的大小与机器人到障碍物的距离有关,距离越近,斥力越大。
- 合力计算与位置更新:将引力和斥力相加得到合力,然后根据步长更新机器人的位置。
- 路径记录与判断:每次更新位置后,我们把新位置记录到路径中,并判断是否到达目标点。如果到达,就停止迭代。
人工势场法的改进
传统的人工势场法存在一些问题,比如容易陷入局部最优解。为了改进它,我们可以引入一些策略,比如增加随机扰动。下面是改进后的代码:
% 初始化参数
start = [0, 0]; % 起始点
goal = [10, 10]; % 目标点
obstacles = [3, 3; 6, 6]; % 障碍物位置
step_size = 0.1; % 步长
max_iter = 1000; % 最大迭代次数
random_prob = 0.1; % 随机扰动概率
% 初始化路径
path = start;
current = start;
for iter = 1:max_iter
% 计算引力
attractive_force = (goal - current) / norm(goal - current);
% 计算斥力
repulsive_force = [0, 0];
for i = 1:size(obstacles, 1)
dist = norm(current - obstacles(i, :));
if dist < 1 % 障碍物影响范围
repulsive_force = repulsive_force + (1 / dist^2) * (1/dist - 1) * (current - obstacles(i, :)) / dist;
end
end
% 计算合力
total_force = attractive_force + repulsive_force;
% 随机扰动
if rand < random_prob
total_force = total_force + 0.1 * randn(1, 2);
end
% 更新当前位置
current = current + step_size * total_force;
% 记录路径
path = [path; current];
% 判断是否到达目标
if norm(current - goal) < step_size
break;
end
end
% 绘制路径
plot(path(:, 1), path(:, 2), '-o');
hold on;
plot(start(1), start(2), 'go', 'MarkerSize', 10);
plot(goal(1), goal(2), 'ro', 'MarkerSize', 10);
plot(obstacles(:, 1), obstacles(:, 2), 'ks', 'MarkerSize', 10);
hold off;改进代码分析
在原代码的基础上,我们增加了一个随机扰动的步骤。以一定的概率(这里是 0.1)给合力加上一个随机的小向量。这样做的目的是当机器人陷入局部最优解时,通过随机扰动让它有机会跳出这个陷阱,继续向目标前进。
其他路径规划算法
除了人工势场法,还有 A*、RRT 等经典的路径规划算法。这里简单提一下,后续有机会再详细展开。在我们的代码仓库里也有这些算法的实现。
A* 算法
A* 算法是一种启发式搜索算法,它结合了 Dijkstra 算法的最优性和贪心最佳优先搜索算法的高效性。通过评估每个节点的代价,选择最优的路径。
RRT 算法
RRT(快速探索随机树)算法是一种基于采样的算法,它通过随机采样来构建一棵树,从起始点开始逐渐扩展,直到到达目标点。这种算法在处理复杂环境时非常有效。
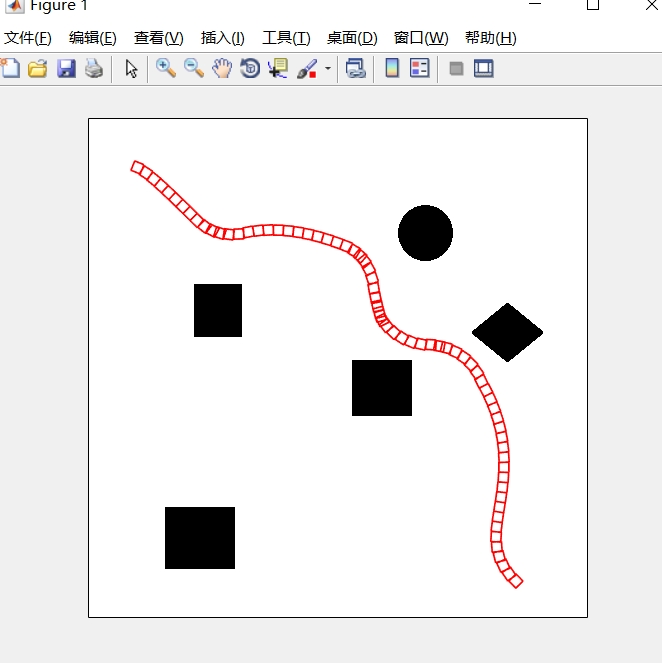
人工势场法路径规划matlab代码,下图为人工势场法,人工势场法改进。 内容包括两种方法编写人工势场法,注释挺详细的,还有文档对公式方法进行解释。 还有A*,rrt等代码。
总之,不同的路径规划算法有不同的优缺点,在实际应用中需要根据具体情况选择合适的算法。希望今天的分享能让你对路径规划算法有更深入的了解,大家可以动手运行一下代码,感受一下这些算法的魅力!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 10
10 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)