许华哲团队最新DOGlove!仅600美元成本,代码开源,彻底打破灵巧操作的普及壁垒
人类的手和机器人的手尺寸、结构都不同,直接把人手动作映射过去会出现 “指不对、动不准” 的问题。动作重定向:通过正运动学(FK)计算人类指尖的精确位置,再用逆运动学(IK)结合缩放因子,把动作适配到不同尺寸的机器人灵巧手(如 LEAP Hand、Shadow Hand,图 7)。比如人类拇指和食指对捏时,机器人手会根据自身尺寸比例,精准完成对应的对捏动作,指尖对齐误差几乎可以忽略;力重定向:机器人
在机器人灵巧操作领域,“精准遥操作” 与 “低成本普及” 似乎是一对不可调和的矛盾。商用力反馈手套动辄 5000 美元以上,普通科研团队难以负担;而低成本方案要么自由度不足,要么缺乏关键的触觉力反馈,导致机器人在接触密集型任务中 “抓不准、拿不稳”。
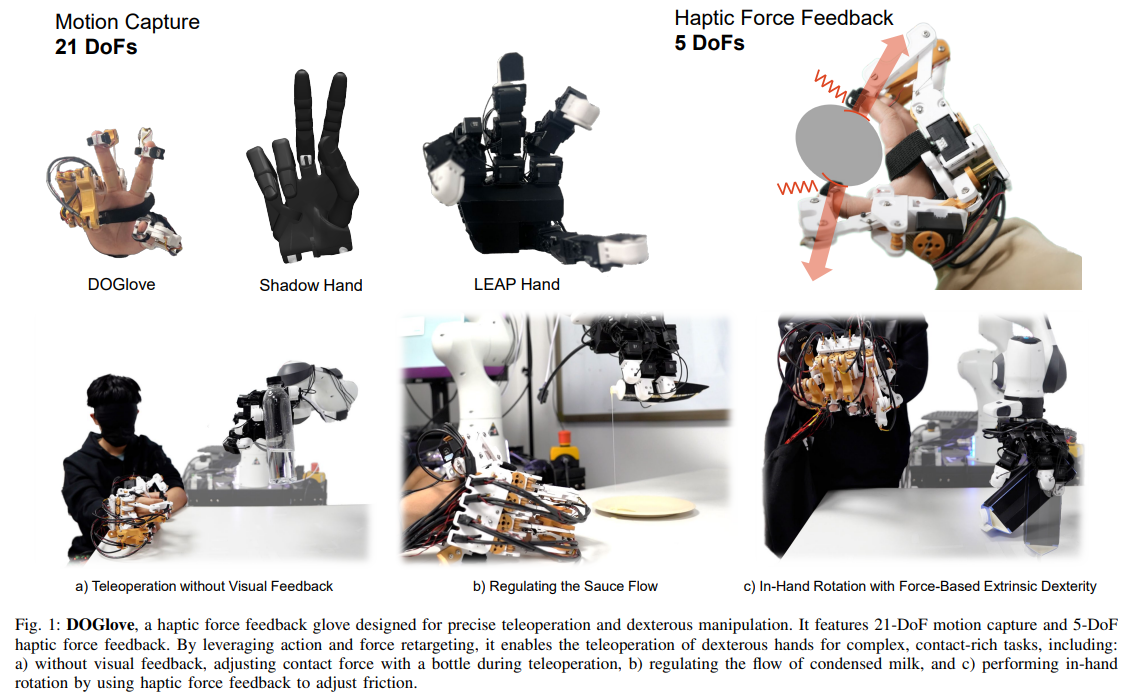
清华大学、上海 AI 实验室等团队联合推出的DOGlove,用不到 600 美元的成本实现了 21 自由度运动捕捉与 5 自由度双模态反馈,不仅能让机器人精准完成 “挤炼乳”“盲抓瓶子” 等复杂任务,还能为模仿学习提供高质量数据。更关键的是,它完全开源,从机械设计到代码算法全部公开,彻底打破了灵巧操作技术的普及壁垒。
项目地址:https://do-glove.github.io/
论文地址:https://arxiv.org/pdf/2502.07730v1
痛点暴击:传统遥操作的 “三大死穴”
当前灵巧手遥操作技术始终卡在 “成本、精度、反馈” 的三角困境中,各类方案都存在致命短板:
| 方案类型 | 典型代表 | 核心槽点 |
|---|---|---|
| 商用力反馈手套 | SenseGlove Nova、Manus VR | 价格堪比高端电脑(5000 美元 +),闭源生态难以适配机器人学习框架,科研和工业都用不起 |
| 视觉动捕方案 | RGB 相机 + AnyTeleop 算法 | 手 - 物交互时容易被遮挡,只能捕捉姿态却没有力反馈,操作全靠 “猜”,精准度堪忧 |
| 简易手套系统 | 低成本传感器 + 基础连杆 | 自由度通常低于 15,无法还原人类手指的精细动作,反馈单一,复杂任务直接 “歇菜” |
这些方案都忽略了一个核心事实:灵巧操作的本质是 “几何运动精准映射” 与 “接触动力学真实感知” 的双向奔赴。人类用手操作时,既能通过指尖位置控制物体姿态,又能通过触觉和力度感知物体的软硬、轻重,而传统方案要么只做 “运动捕捉”,要么只做 “简单反馈”,始终无法实现真正的沉浸式操作。
DOGlove 的出现,正是要一次性解决这三大痛点——用低成本实现高精度运动捕捉,用双模态反馈还原真实接触感知,用开源生态打破技术垄断。
硬核拆解:600 美元实现专业级性能的秘密
DOGlove 的核心优势的在于 “硬件精简高效 + 软件智能适配”,每个设计都精准命中需求,没有一丝多余:
21 自由度运动捕捉:复刻人类手指的 “灵活舞步”
要让机器人精准模仿人类动作,首先要让手套能精准捕捉手指的每一个细微姿态。DOGlove 采用拟人化 kinematic 设计(图 3),完美复刻了人类手部的关节结构:
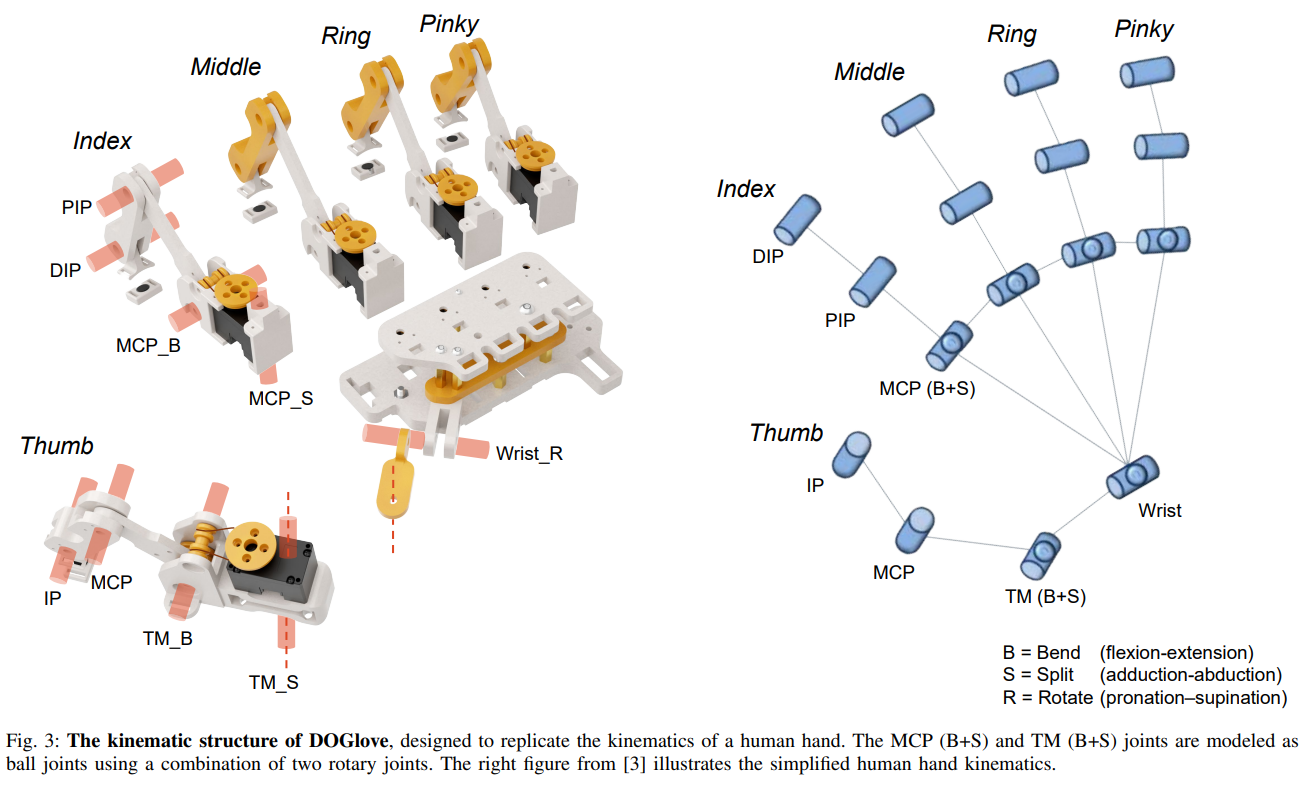
- 拇指包含 3 个关键关节:1 个旋转关节(IP)负责屈伸,1 个铰链关节(MCP)控制摆动,1 个球关节(TM)支持多方向活动,还额外增加了手腕旋转自由度,让拇指能完成复杂的对捏、翻转动作;
- 食指、中指、无名指、小指各有 3 个关节:2 个铰链关节(DIP/PIP)负责指尖和指节屈伸,1 个球关节(MCP)支持手指的摆动和开合,每个关节都能独立运动,互不干扰;
- 关键部件选用超紧凑的 Alps RDC506018A 旋转编码器(尺寸仅 11mm×14.9mm×2.2mm),16 个编码器配合 5 个伺服电机,实现 21 自由度的全姿态捕捉。原始角度误差仅 ±7.2°,经过校准后能降至 ±1°,精准度媲美专业动捕设备。
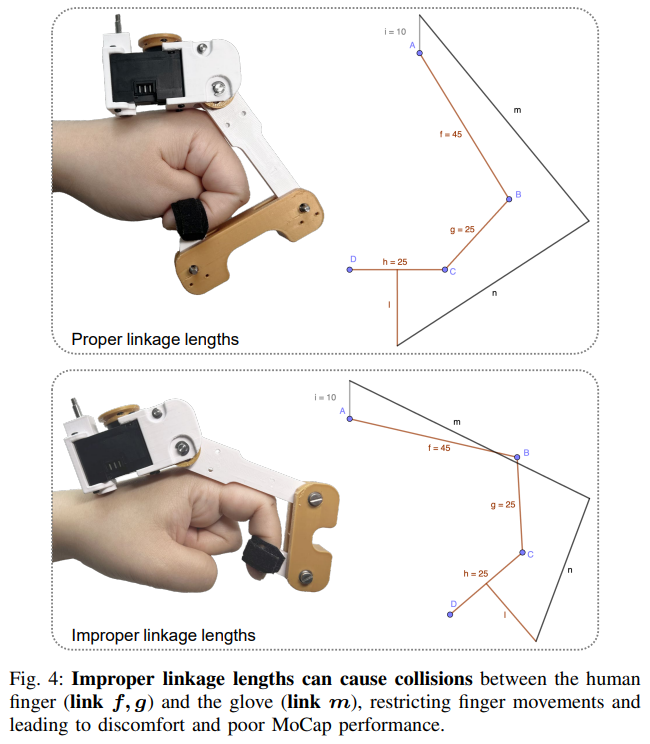
更贴心的是,手套采用模块化设计,连杆长度适配多数成人手型,还支持定制化替换,避免因手型差异导致的佩戴不适或捕捉误差(图 4)。
双模态反馈:让机器人的 “触感” 直达人类指尖
如果说运动捕捉是 “让机器人跟着人手动”,那么触觉力反馈就是 “让人手感知机器人的触感”。DOGlove 创新采用 “线缆驱动 force feedback + LRA 触觉反馈” 的双模态方案(图 5),还原最真实的接触体验:
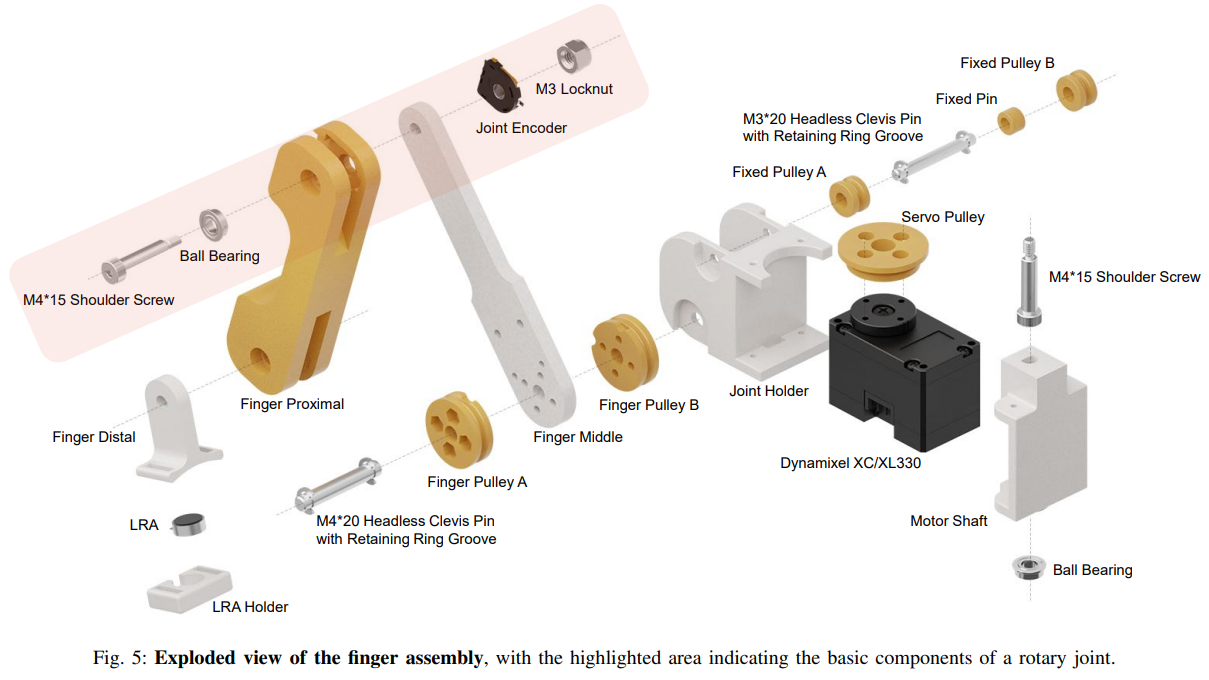
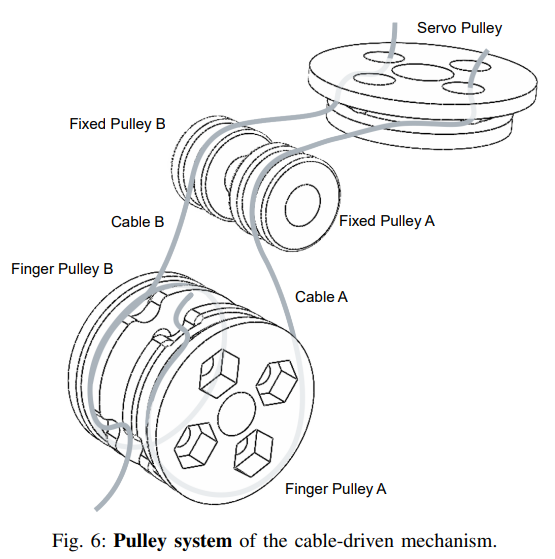
- 力反馈部分:选用 Dynamixel XC/XL330 伺服电机,通过精巧的线缆驱动滑轮系统(图 6),实现双向扭矩传递, stall torque 可达 0.5N・m,足以阻止手指运动,模拟物体的阻力。比如抓握瓶子时,手套会根据机器人的握力大小,给手指施加反向压力,让操作者清晰感知 “握得太紧” 或 “太松”;
-
触觉反馈部分:每个指尖都装有 8mm×2.5mm 的线性共振执行器(LRA),能在 240Hz 的共振频率下产生细腻振动,配合 TI DRV2605L 驱动芯片和 100 + 种预编程波形,可模拟不同物体的表面纹理——比如触碰光滑的玻璃、粗糙的纸张、柔软的布料时,振动模式完全不同,触感真实可辨;
-
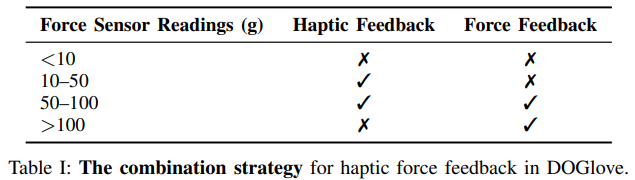
反馈策略智能适配:根据机器人指尖力传感器的数据(精度 1g),DOGlove 设计了三段式反馈逻辑(表 1),低于 10g 时过滤噪声,10-50g 时仅触发触觉反馈感知轻微接触,50-100g 时双反馈协同,超过 100g 时仅保留力反馈避免干扰,让反馈既精准又不冗余。
重定向算法:打通 “人机协作” 的最后一公里
人类的手和机器人的手尺寸、结构都不同,直接把人手动作映射过去会出现 “指不对、动不准” 的问题。DOGlove 的重定向算法,就像一位 “翻译官”,完美解决了人机几何与动力学的适配问题:
- 动作重定向:通过正运动学(FK)计算人类指尖的精确位置,再用逆运动学(IK)结合缩放因子,把动作适配到不同尺寸的机器人灵巧手(如 LEAP Hand、Shadow Hand,图 7)。比如人类拇指和食指对捏时,机器人手会根据自身尺寸比例,精准完成对应的对捏动作,指尖对齐误差几乎可以忽略;

- 力重定向:机器人指尖的力传感器实时采集接触力数据,通过线性映射转化为伺服电机的控制信号,再通过线缆传递给人类手指。同时,LRA 根据力的大小切换振动波形,让操作者既能感知力的强度,又能分辨接触的类型。
更厉害的是,整个系统的延迟极低:运动捕捉频率最高 120Hz,力反馈频率最高 30Hz,配合 STM32 单片机的 DMA 加速和串口高速传输,从人手动作到机器人响应,再到反馈回人手,全程延迟控制在 30ms 以内,实现 “手随心动” 的沉浸式操作体验。
实战检验:这些复杂任务都能轻松拿捏
DOGlove 在遥操作、物体感知、模仿学习三大核心场景中,都用实验证明了其硬核实力:
盲辨物体:仅凭 “触感” 区分不同物体
5 名未经过训练的操作者,仅凭 DOGlove 的反馈,在无视觉、无听觉的情况下区分 5 组物体(图 8),涵盖形状、尺寸、软硬度等不同差异:
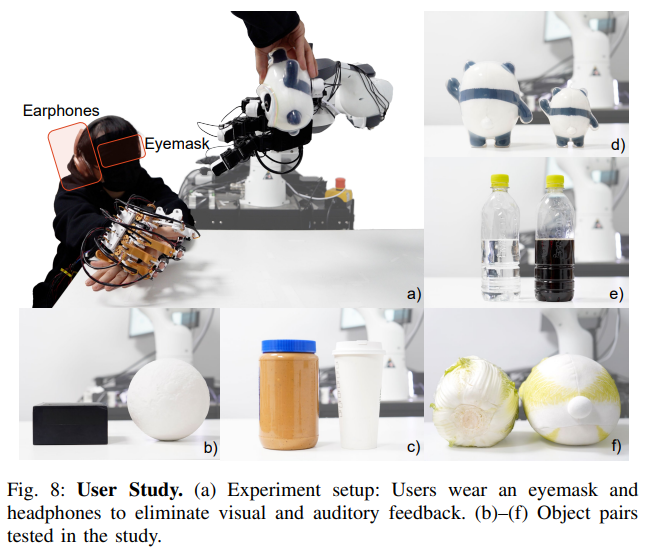
- 基础物体对(球与盒子、不同尺寸圆柱):所有反馈模式的成功率都达到 100%,操作者能轻松通过触觉和力反馈区分明显差异;
- 复杂物体对(装满水与可乐的相同瓶子):仅力反馈组成功率 80%,操作者能通过握力感知瓶子的软硬差异;仅触觉反馈组成功率 60%,能通过接触时的振动持续时间判断物体变形程度;
- 最难的一组(玩具卷心菜与真实卷心菜):玩具卷心菜更软、尺寸更大,但抓取时会变形,导致力反馈判断失真,而触觉反馈能感知表面纹理差异,成功率 30%,展现了双模态反馈的互补价值。
无视觉遥操作:闭眼也能精准控物
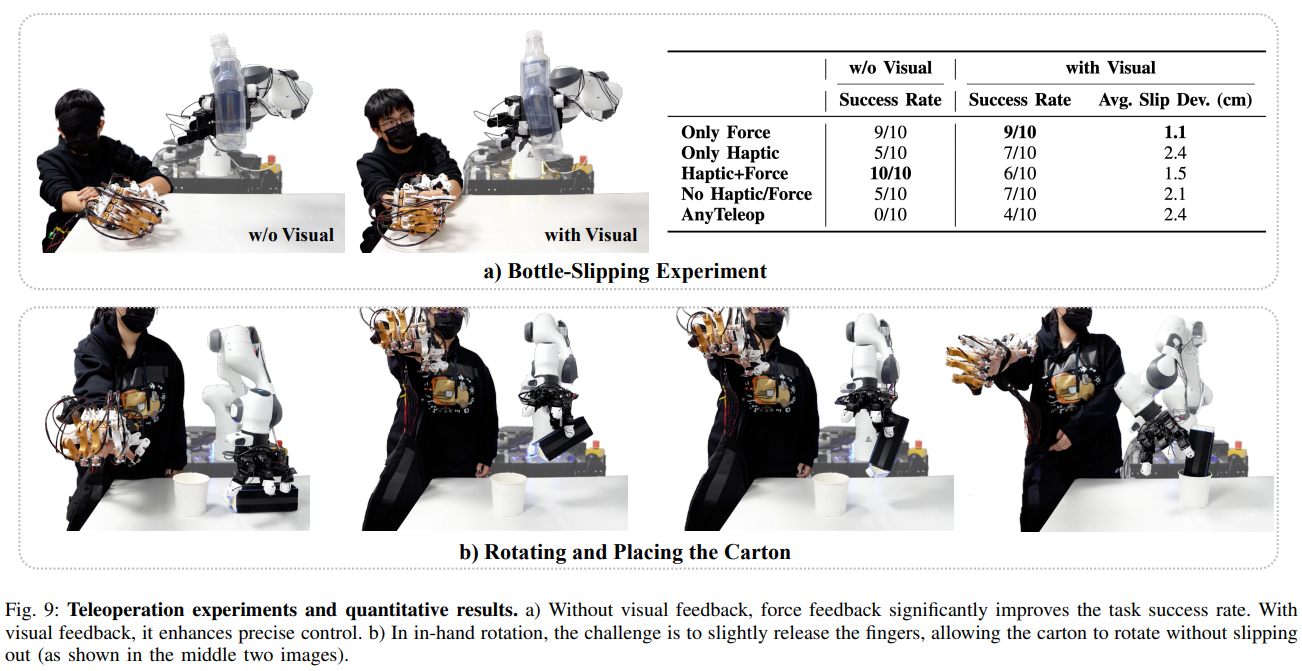
在瓶身滑动任务中(图 9a),操作者佩戴眼罩和耳机,完全依赖 DOGlove 的反馈控制瓶子滑动,要求 15 秒内让瓶子成功滑动且不跌落:
- 仅开启力反馈时,成功率就达到 90%;当力反馈 + 触觉反馈协同工作时,成功率直接拉满至 100%;
- 对比纯视觉遥操作方案 AnyTeleop,后者成功率为 0—— 没有力反馈,操作者根本无法判断瓶子是否在滑动、滑动速度是否过快,很容易导致瓶子跌落;
- 即使有视觉反馈,力反馈组的滑动偏差也仅 1.1cm,远优于无反馈组(2.1cm)和纯视觉组(2.4cm),证明力反馈能显著提升操作精度。
模仿学习:3 条数据就能训练出高精度策略
DOGlove 采集的高质量演示数据,能直接用于训练机器人的模仿学习策略。研究团队采用 3D Diffusion Policy(DP3)算法,基于 DOGlove 采集的数据训练了 3 个典型任务:
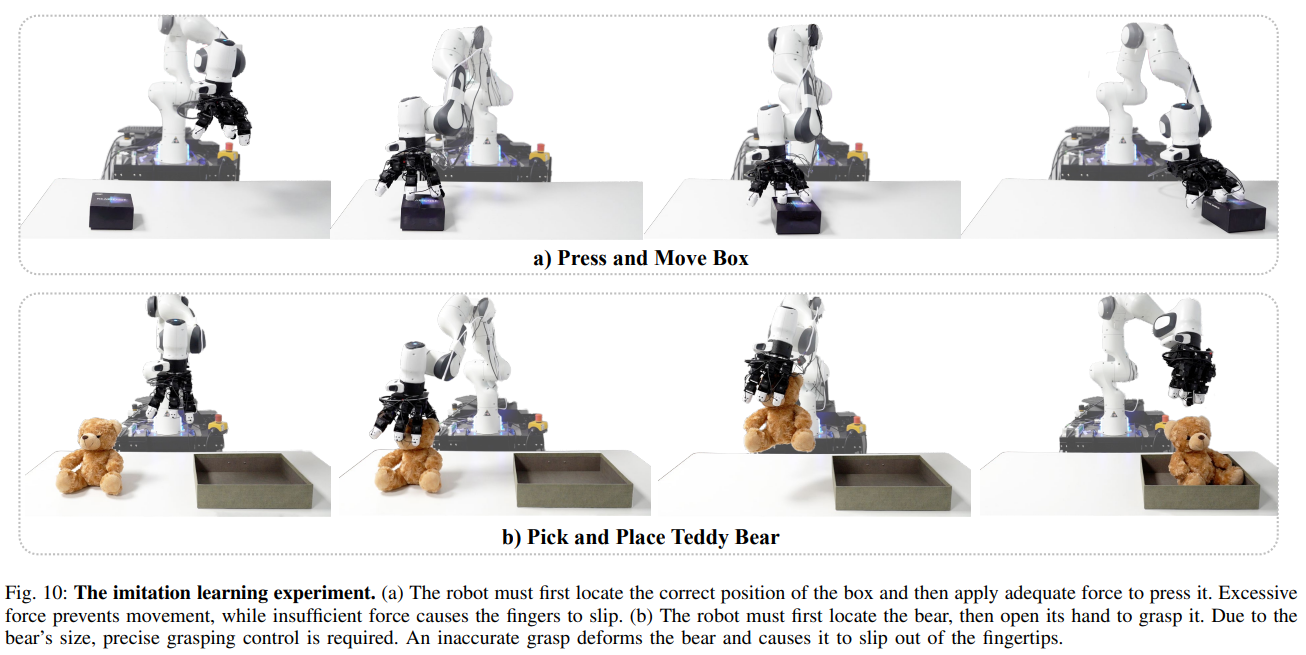
- 推箱任务:40 条演示数据,机器人能精准控制按压力度,既不会因压力太小导致打滑,也不会因压力太大无法推动,20 次试验成功率 85%;
- 毛绒玩具抓取:40 条演示数据,机器人能根据玩具的柔软特性调整抓取力度,避免变形或滑落,20 次试验成功率 70%;
- 纸盒旋转放置(长时域接触任务):仅用 3 条演示数据,机器人就能完成 “水平抓取 - 垂直旋转 - 精准放入桶中” 的复杂动作,10 次试验成功率 90%,远超传统数据采集方案的效率。
总结:
DOGlove 的突破性价值不仅在于以不到 600 美元的成本(仅为商用产品的 1/10)实现了专业级灵巧操作性能,更在于其全开源生态对行业的普惠意义——硬件端公开机械设计、电路原理图,主体结构可通过普通 3D 打印机(PETG 材料)制作,电子元件均为市售标准件,6 小时即可完成组装;软件端开放嵌入式代码、装配指南、URDF 模型、重定向算法及 MuJoCo 仿真环境,为开发者提供了完整的二次开发基础,彻底打破了高端灵巧操作技术的价格壁垒与生态垄断。
尽管当前 550g 的重量对长时间佩戴的舒适性仍有影响,手型适配性也存在优化空间,但团队规划的轻量化伺服选型、定制化减速机构及多尺寸连杆套件开发,将进一步提升其实际应用场景的适配能力。作为一款兼具高性价比、精准双模态反馈与开源属性的人机交互设备,DOGlove 不仅为遥操作提供了高保真解决方案,更让科研机构、中小企业乃至个人都能参与到灵巧操作技术的研发中,推动该领域从实验室走向规模化应用,真正开启了人机协同灵巧操作的 “民主化” 时代,为工业装配、医疗辅助、家庭服务等多元场景的技术落地奠定了低成本、可复制的基础。
具身求职内推来啦
国内最大的具身智能全栈学习社区来啦!
推荐阅读
从零部署π0,π0.5!好用,高性价比!面向具身科研领域打造的轻量级机械臂
工业级真机教程+VLA算法实战(pi0/pi0.5/GR00T/世界模型等)
具身智能算法与落地平台来啦!国内首个面向科研及工业的全栈具身智能机械臂
VLA/VLA+触觉/VLA+RL/具身世界模型等!具身大脑+小脑算法与实战全栈路线来啦~
MuJoCo具身智能实战:从零基础到强化学习与Sim2Real
Diffusion Policy在具身智能领域是怎么应用的?为什么如此重要?
1v1 科研论文辅导来啦!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 15
15 0
0- 0



 已为社区贡献103条内容
已为社区贡献103条内容

所有评论(0)