爬楼机器人技术解析:MEMS IMU 与多传感器融合生态搭建实战
当爬楼机器人在医疗辅助、工业服务、特种救援等领域加速渗透,“稳定性不足”“环境适配弱”“成本居高不下” 仍成为制约厂家抢占市场的三大核心瓶颈。作为机器人的"内耳"系统,MEMS IMU通过实时监测机器人的加速度和角速度等运动状态信息,为爬楼机器人在楼梯、垂直墙面等复杂地形中的稳定运动提供关键数据支持。MEMS IMU凭借其体积小、功耗低、成本低、实时性强等优势,已成为解决爬楼机器人运动稳定性与环境适应性问题的核心传感器。

爬楼机器人的挑战与困境
Part.1
爬楼机器人的市场竞争力,本质上是复杂地形适应能力的较量,而 MEMS IMU 正对准行业最棘手的痛点逐个突破:
1稳定性与平衡性
机器人需在楼梯、垂直墙面等不规则地形中维持重心,避免倾倒或跌落。尤其在单足支撑或双足交替过程中,质心位置的微小偏移可能导致严重失衡。MEMS IMU 实时捕捉加速度、角速度数据,配合 PID 算法动态调节重心,助力机器人保持稳定和平衡。
2环境适配局限性
传统光电传感器依赖光线、GNSS信号,在封闭楼道、黑暗环境、复杂表面(裂缝、障碍物)中易失效。MEMS IMU 完全脱离外部环境依赖,-20°C 至 85°C 全温域稳定工作,不受外界干扰,适配各类极端场景。
3数据融合壁垒
多传感器协同的时间同步、坐标转换难题,长期制约控制精度。MEMS IMU 天然支持卡尔曼滤波、互补滤波等算法,与视觉、力 / 力矩、编码器等传感器无缝协同,轻松破解数据融合痛点。
协同增效:MEMS IMU 构建多传感器融合生态
Part.2
单一传感器的性能极限,远不及协同系统的潜力爆发。MEMS IMU 作为感知核心,与各类传感器形成 “1+1>2” 的融合效应:
与力/力矩传感器协同
六维力传感器安装在机器人足端或支撑装置上,监测与地面的接触力。当IMU检测到姿态角异常时,力传感器提供精确的支撑力数据,辅助调整重心位置和步态。
与视觉传感器融合
通过扩展卡尔曼滤波(EKF)融合视觉SLAM与IMU数据,实现高精度定位和地图构建。IMU提供高频的本体运动信息,视觉传感器提供环境结构信息,两者互补克服各自局限性。
与编码器配合.
电机编码器和关节编码器提供精确的旋转角度和速度信息。如轮履机器人通过电机上安装的光电编码器反馈电机速度,结合IMU的姿态数据,采用PID算法调节速度,使机器人在爬楼梯时保持稳定。
与超声 / 红外传感器互补
这些传感器用于距离测量和避障,弥补IMU在绝对位置感知上的不足。如爬墙机器人,通过超声波和红外传感器感知周围环境,IMU提供姿态信息,两者结合实现安全避障和路径规划。
与触觉传感器联动
触觉传感器安装在机器人全身,感知接触压力和温度。当IMU检测到姿态角异常时,触觉传感器提供接触面的摩擦力信息,辅助调整步态和抓地力,提高运动稳定性。
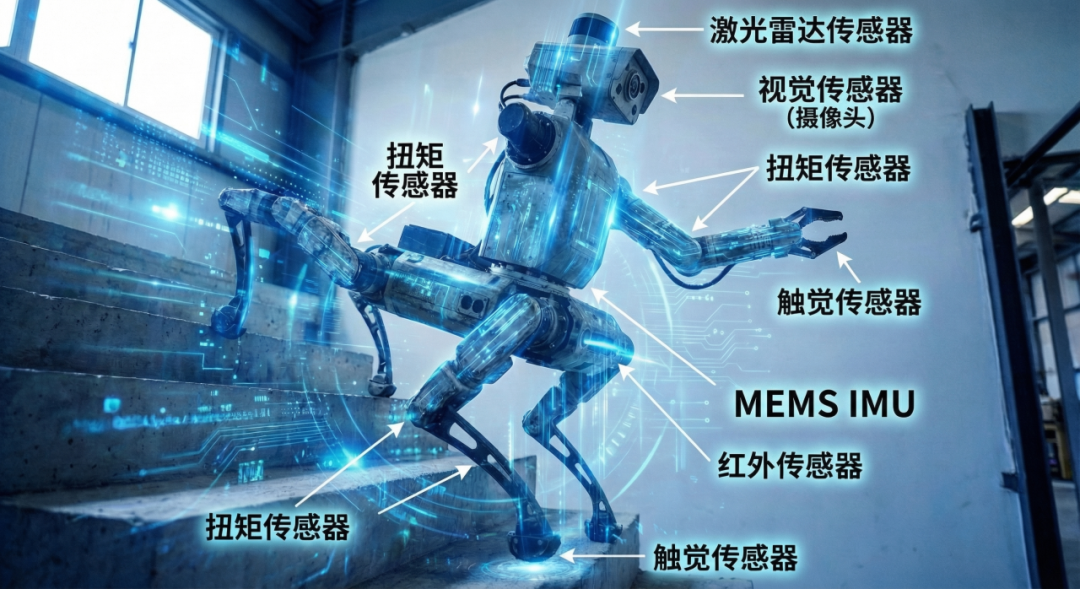
MEMS IMU在爬楼机器人上的应用
Part.3
MEMS惯性测量单元(IMU)是一种集成传感器,通常由加速度计、陀螺仪和磁力计三种主要部件组成,形成9轴传感器系统。其核心功能是通过测量物体的加速度、角速度及磁场等物理量,提供精确的运动和定位数据,从而辅助机器人实现稳定运动和精准控制。

安装于躯干/腰部:实时反馈俯仰角、滚转角,用于重心调节和平衡控制,检测整体姿态。
安装于关键运动部件(如推杆):反馈倾角信息,触发推杆高度调整或电机速度修正,监测局部运动状态。
与视觉传感器配合:为视觉数据提供姿态参考,校准坐标系,提高环境感知精度,用于姿态信息校准。
MEMS IMU推荐
运动传感器模组S6507是爬楼机器人的理想适配之选,其核心参数全面契合甚至超越行业选型标准,从精度、动态性能到环境适配性,全方位筑牢机器人稳定运行根基。S6507不依赖外部光线等信号,可以在各种光照条件和封闭环境中稳定工作。
在精度表现上,陀螺仪及加速度计的精度满足爬楼机器人的使用需求;
动态性能方面,数据更新率为2000Hz ,毫秒级响应速度适配爬楼过程中的姿态快速调整,加速度计 1000Hz、陀螺仪 345Hz 的宽频带设计,搭配强抗振动能力,可从容应对楼梯攀爬时的高频振动与冲击;
环境适应性上,-45~85℃的工作温度范围让产品在极端温湿度环境下仍能保持稳定输出;
集成适配性上,15×15×5.7mm 的紧凑型封装、1.7g 的轻量化设计,完美契合机器人狭小安装空间需求,标准 SPI 接口可快速兼容 ROS1/ROS2 系统及各类控制模块,能实现免改动快速集成;
全场景兼容,从医疗辅助爬楼机的平稳要求,到工业外墙清洁机器人的高空稳定需求,再到消防救援机器人的极端环境适配,S6505通过参数梯度配置,满足不同场景的性能诉求。

总结
Part.5
MEMS IMU在爬楼机器人中扮演着不可替代的角色,是解决机器人运动稳定性与环境适应性问题的核心传感器。
在实际应用中,MEMS IMU应安装在机器人重心附近或关键运动部件上,与力/力矩传感器、视觉传感器、编码器等协同工作,通过卡尔曼滤波、互补滤波等算法融合多传感器数据,提高系统的整体精度和鲁棒性。
通过实时监测机器人的加速度和角速度等运动状态信息,MEMS IMU为爬楼机器人提供了精确的姿态估计和运动反馈,使其能够在楼梯、垂直墙面等复杂地形上保持稳定移动。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 5
5 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)