西门子PLC配KUKA机器人程序 程序为西门子S7-1500PLC博途调试: 西门子与KUKA...
不是技术细节,而是学会在PLC里埋调试彩蛋——比如某个特定条件下激活的debug模式,能瞬间把运行速度降到10%,方便慢动作排查问题。注意这里用了常闭触点(AN),安全门关到位的时候信号是0,所以要用取反逻辑。特别是处理多车型切换时,每个车型对应不同的状态分支,维护起来至少不会乱成一锅粥。比起正儿八经的注释,反而更容易唤醒调试时的记忆。项目为汽车焊装程序,工程大设备多程序复杂,是学习西门子PLC或
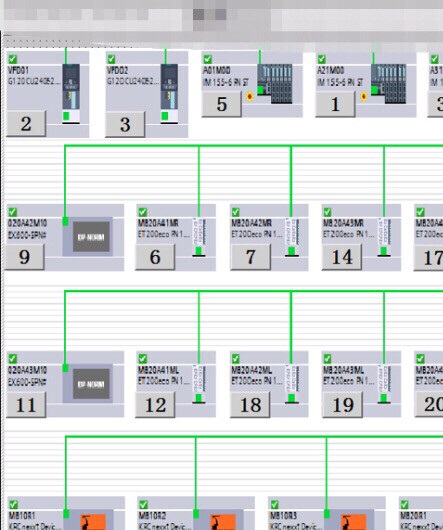
西门子PLC配KUKA机器人程序 程序为西门子S7-1500PLC博途调试: 西门子与KUKA机器人通讯; PLC控制KUKA机器人安全回路,设备安全装置控制; PLC与KUKA机器人信号交互,外部自动控制; PLC控制KUKA机器人干涉区zone逻辑; PLC控制KUKA机器人程序段segment逻辑; PLC控制SEW电机变频运动程序; PLC控制外围设备夹具动作; PLC系统有手动/自动/强制/空循环/多车型运行方式; 配置触摸屏HMI,程序带详细注释等等。 项目为汽车焊装程序,工程大设备多程序复杂,是学习西门子PLC或调试项目绝佳参考案例。
搞工控的兄弟肯定都懂,PLC和机器人联调那真是痛并快乐着。这次咱们要聊的西门子S7-1500配KUKA机器人的焊装项目,绝对是个实战型案例。老规矩,先上硬菜——安全回路这个祖宗必须伺候好。
安全回路这块儿,PLC得管急停、安全门、光栅这些玩意儿。看这段STL代码:
A "急停按钮"
AN "安全门状态"
= "安全回路_OK"就这么几行,但玩的就是心跳。急停和安全门状态必须同时满足才能激活安全回路。注意这里用了常闭触点(AN),安全门关到位的时候信号是0,所以要用取反逻辑。
通讯方面,PROFINET走起。KUKA侧得配个X11/X13接口,PLC这边要搞个机器人控制数据块:
DATA_BLOCK "Robot_Ctrl"
STRUCT
StartAuto : Bool; //自动启动
ProgramNo : Int; //程序号
ZoneSelect : Array[1..3] of Bool; //干涉区选择
SegmentFlag : Word; //程序段标记
END_STRUCT这个DB块就是PLC和机器人的聊天窗口。比如要触发程序段3,直接置位SegmentFlag.2(从0开始计数),机器人那边用$IN[18]之类的信号接收。
干涉区逻辑贼有意思,得考虑多车型混线。比如下面这个FC块处理动态区域切换:
IF "当前车型" = 1 THEN
"ZoneSelect"[1] := TRUE;
"ZoneSelect"[2] := FALSE;
ELSIF "当前车型" = 2 THEN
"ZoneSelect"[1] := FALSE;
"ZoneSelect"[2] := TRUE;
END_IF;机器人根据这些信号自动加载对应的zone数据,避免不同车型工件打架。调试时候被这坑过——忘记复位选择位导致机器人进错区域,那碰撞声听着比指甲划黑板还酸爽。
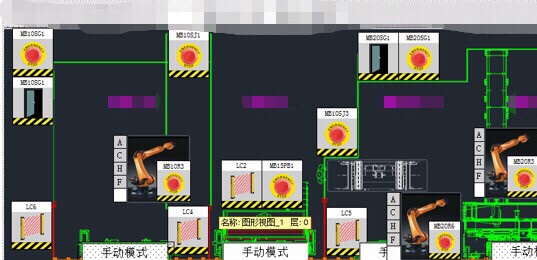
西门子PLC配KUKA机器人程序 程序为西门子S7-1500PLC博途调试: 西门子与KUKA机器人通讯; PLC控制KUKA机器人安全回路,设备安全装置控制; PLC与KUKA机器人信号交互,外部自动控制; PLC控制KUKA机器人干涉区zone逻辑; PLC控制KUKA机器人程序段segment逻辑; PLC控制SEW电机变频运动程序; PLC控制外围设备夹具动作; PLC系统有手动/自动/强制/空循环/多车型运行方式; 配置触摸屏HMI,程序带详细注释等等。 项目为汽车焊装程序,工程大设备多程序复杂,是学习西门子PLC或调试项目绝佳参考案例。
SEW变频器控制有点讲究,得搞速度斜坡。看这个运动控制块:
MC_MoveVelocity(
Axis:= "传送链轴",
Velocity:= 2.5,
Direction:= MC_Positive,
Jerk:= 50.0,
BufferMode:= MC_Aborting);Jerk参数调了老半天,加速度突变太猛传送链上的夹具能给你表演空中转体。后来发现把Jerk从默认100降到50,动作瞬间温柔多了。
HMI画面上藏了个彩蛋:长按车型选择区域3秒弹出高级参数设置。毕竟产线老司机们都有些神秘操作需求,这个后门留得妙。报警记录做了分级过滤,不然几百条报警记录能刷屏到你怀疑人生。
说到程序结构,必须祭出祖传的配方:
IF "手动模式" THEN
//处理各轴点动
ELSIF "自动模式" AND "安全_OK" THEN
CASE "当前步骤" OF
0: //初始化
1: //上件完成
2: //焊接启动
...
END_CASE;
END_IF;这种状态机结构虽然看着土,但胜在稳如老狗。特别是处理多车型切换时,每个车型对应不同的状态分支,维护起来至少不会乱成一锅粥。
最后说下注释的艺术,见过最骚的操作是在DB块里写段子:
//此信号如同初恋——该通的时候不通要出事,不该通的时候乱通更要命
"夹紧确认" : Bool; 这种注释虽然不正经,但真遇到信号异常时,看一眼就能想起当初为什么这么设计。比起正儿八经的注释,反而更容易唤醒调试时的记忆。
这个项目啃下来最大的收获是什么?不是技术细节,而是学会在PLC里埋调试彩蛋——比如某个特定条件下激活的debug模式,能瞬间把运行速度降到10%,方便慢动作排查问题。毕竟在产线停机就是钱,快速定位才是硬道理。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 0
0 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)