【改进蚁群算法】/蚁群算法/Dijkstra算法/遗传算法/人工势场法实现二维/三维空间路径规划
【改进蚁群算法】/蚁群算法/Dijkstra算法/遗传算法/人工势场法实现二维/三维空间路径规划 本程序为改进蚁群算法+Dijkstra算法+MAKLINK图理论实现的二维空间路径规划 算法实现: 1)基于MAKLINK图理论生成地图,并对可行点进行划分; 2)用Dijkstra算法实现次优路径的寻找; 3)在Dijkstra算法的基础上加入了蚁群算法,调整了搜索策略,使路径更短; 4)最终对基础的蚁群算法进行改进(对搜索节点的角度进行限制),调整了搜索策略,使路径更短 可调参数:算法迭代次数;起始点;目标点;障碍物位置;障碍物大小 仿真结果:地图上显示最优路径的对比 + 迭代曲线的对比 + 输出行进距离对比 这段程序主要是进行路径规划的算法实现,应用在二维规划空间中。程序的主要思路是使用Dijkstra算法来寻找最短路径。 首先,程序导入障碍物数据和链路端点数据,并在二维规划空间中绘制起点和终点的位置。然后,根据障碍物数据绘制障碍物图形,并绘制自由连接线和中点。 接下来,根据可行路径矩阵绘制所有可行路径。然后使用Dijkstra算法找出最优路径,并在图中标注出最优路径。 接下来,程序使用蚁群算法进行路径规划。首先进行蚁群算法参数的初始化,然后进行迭代搜索。在每次迭代中,蚂蚁根据信息素和启发值选择下一个节点,并更新信息素。最后,程序计算路径长度并更新最优路径。 最后,程序绘制出原始蚁群算法和改进蚁群算法的最短路径,并输出最短路径的长度。 整个程序的结构清晰,逻辑严谨,主要涉及到路径规划、Dijkstra算法和蚁群算法等知识点。通过这段程序的分析,可以了解路径规划算法的实现过程和应用场景。
1. 系统概述
本系统实现了一种融合 MAKLINK 图理论、Dijkstra 最短路径算法 与 改进型蚁群优化算法(ACO) 的二维空间路径规划方法,适用于存在多边形障碍物的复杂环境。系统首先基于 MAKLINK 图理论构建自由连接线网络,生成可行路径拓扑结构;随后利用 Dijkstra 算法快速获取初始可行路径;最后通过两种蚁群算法(原始与改进版本)对路径进行精细化优化,以获得更贴近实际需求的平滑、短距路径。
该系统特别适用于无人机航迹规划、机器人导航、智能物流路径优化等对安全性与路径质量有较高要求的场景。
2. 核心流程架构
整个路径规划流程分为四个主要阶段:
2.1 环境建模与 MAKLINK 图构建
系统首先加载障碍物顶点数据(barrier.txt),将地图中的障碍物表示为若干多边形。基于 MAKLINK 图理论,系统在障碍物顶点之间构建自由连接线(即不会与任何障碍物相交的线段),并提取这些线段的中点作为图中的关键节点(共20个)。这些节点与起点 S、终点 T 共同构成一个包含 22 个节点的图结构。
【改进蚁群算法】/蚁群算法/Dijkstra算法/遗传算法/人工势场法实现二维/三维空间路径规划 本程序为改进蚁群算法+Dijkstra算法+MAKLINK图理论实现的二维空间路径规划 算法实现: 1)基于MAKLINK图理论生成地图,并对可行点进行划分; 2)用Dijkstra算法实现次优路径的寻找; 3)在Dijkstra算法的基础上加入了蚁群算法,调整了搜索策略,使路径更短; 4)最终对基础的蚁群算法进行改进(对搜索节点的角度进行限制),调整了搜索策略,使路径更短 可调参数:算法迭代次数;起始点;目标点;障碍物位置;障碍物大小 仿真结果:地图上显示最优路径的对比 + 迭代曲线的对比 + 输出行进距离对比 这段程序主要是进行路径规划的算法实现,应用在二维规划空间中。程序的主要思路是使用Dijkstra算法来寻找最短路径。 首先,程序导入障碍物数据和链路端点数据,并在二维规划空间中绘制起点和终点的位置。然后,根据障碍物数据绘制障碍物图形,并绘制自由连接线和中点。 接下来,根据可行路径矩阵绘制所有可行路径。然后使用Dijkstra算法找出最优路径,并在图中标注出最优路径。 接下来,程序使用蚁群算法进行路径规划。首先进行蚁群算法参数的初始化,然后进行迭代搜索。在每次迭代中,蚂蚁根据信息素和启发值选择下一个节点,并更新信息素。最后,程序计算路径长度并更新最优路径。 最后,程序绘制出原始蚁群算法和改进蚁群算法的最短路径,并输出最短路径的长度。 整个程序的结构清晰,逻辑严谨,主要涉及到路径规划、Dijkstra算法和蚁群算法等知识点。通过这段程序的分析,可以了解路径规划算法的实现过程和应用场景。
自由连接线数据由 lines.txt 提供,每条线由两个端点编号定义。系统据此生成完整的连接关系,并可视化所有可行连接线与节点。
2.2 可行路径图构建与 Dijkstra 初始路径生成
系统读取预计算的可达性矩阵(matrix.txt),该矩阵定义了 22 个节点之间是否可以直接连通(1 表示可达,0 表示不可达)。在此基础上,系统调用 DijkstraPlan 函数,基于 Dijkstra 算法计算从起点到终点的最短路径(以欧氏距离为边权)。
该路径作为后续优化的初始解,不仅保证了可行性,还提供了较优的起点,显著加速了后续智能优化过程的收敛。
2.3 原始蚁群算法优化
在 Dijkstra 路径确定的线段序列基础上,系统引入原始蚁群算法进行精细化路径调整。每条自由连接线被等分为 10 个候选点,蚂蚁在每条线段上选择一个具体位置作为实际经过点。
算法通过以下机制引导搜索:
- 启发式信息:基于随机扰动生成的局部偏好值;
- 信息素机制:记录历史路径质量,引导后续蚂蚁向优质区域聚集;
- 混合选择策略:结合“最大信息素优先”与“轮盘赌”两种选择方式,平衡探索与开发。
每代迭代后,系统评估所有蚂蚁路径长度,并更新全局最优解与信息素浓度。
2.4 改进型蚁群算法优化(核心创新)
为克服原始蚁群算法易陷入局部最优、收敛速度慢等问题,系统引入一种基于几何角度引导的改进蚁群算法。其关键改进包括:
- 自适应离散化:每条线段的候选点数量不再固定为 10,而是根据线段实际长度动态确定(向上取整),使搜索粒度与几何尺度相匹配;
- 角度启发式:在每条线段上,候选点的选择不再依赖随机扰动,而是计算该点与当前蚂蚁位置及终点构成的转向角。角度越小(路径越直),启发值越高;
- 方向性引导:通过最大化“信息素 × (1/转向角)”的综合指标,引导蚂蚁倾向于选择能保持路径平滑、减少急转弯的点;
- 概率选择函数封装:将适应度归一化与累积概率计算封装为独立函数(
suff_fun和sel),提升代码模块化与可维护性。
该改进显著提升了路径的平滑性与全局最优性,尤其在复杂障碍物环境中表现更优。
3. 可视化与对比分析
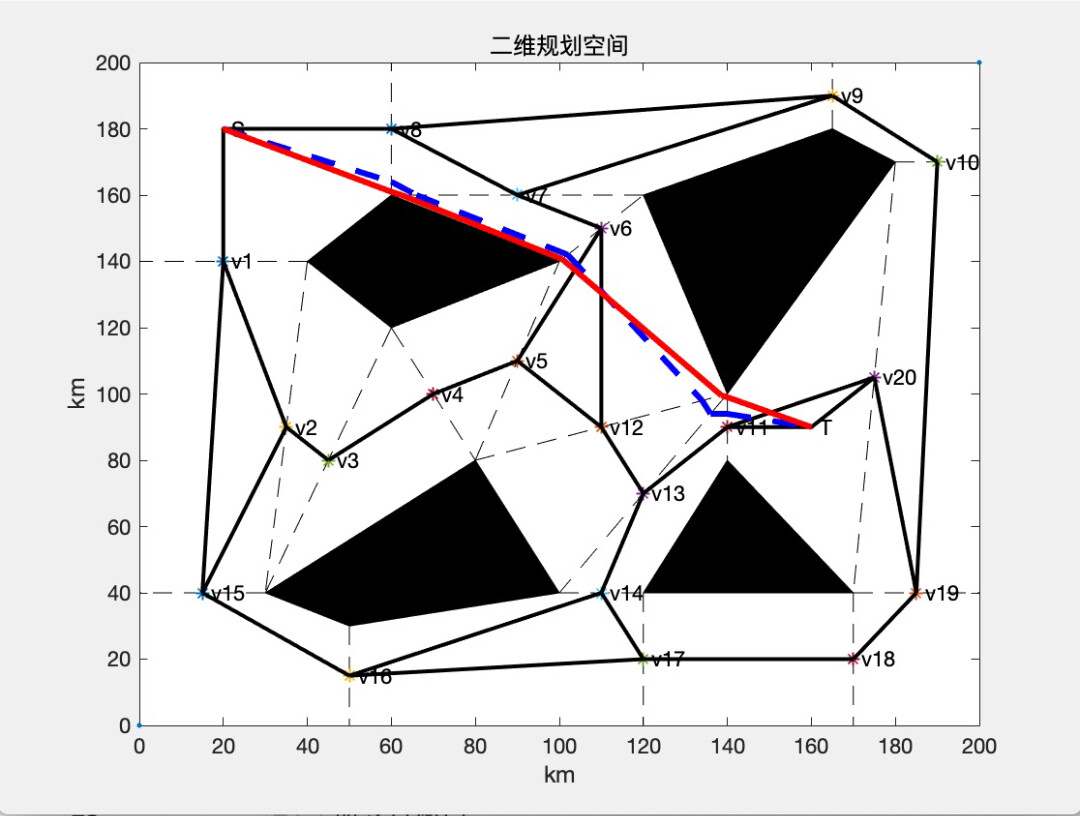
系统提供完整的可视化功能:
- 绘制障碍物、起点/终点、自由连接线及中点;
- 显示 Dijkstra 初始路径(黄色虚线);
- 同时绘制原始蚁群与改进蚁群算法优化后的最终路径(蓝色虚线 vs 红色实线);
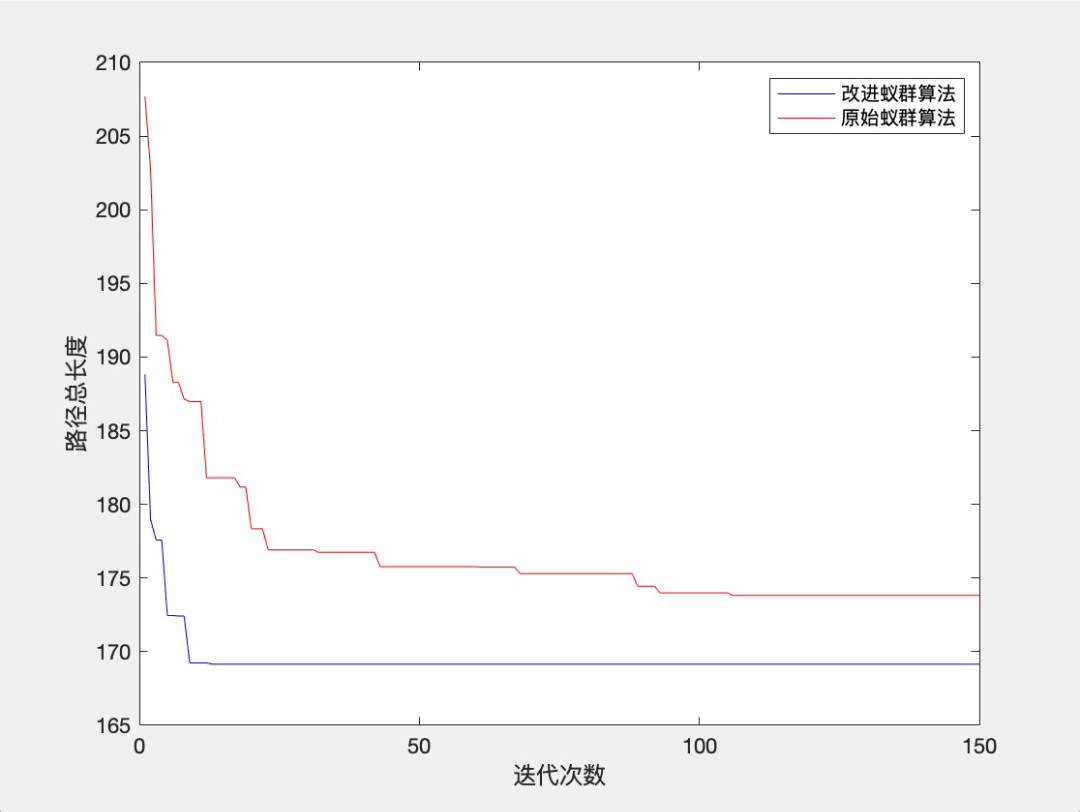
- 绘制两算法在 200 次迭代中的路径长度收敛曲线,直观对比优化性能。
通过对比图可清晰看出:改进蚁群算法不仅收敛更快,且最终路径长度更短、转折更平缓,验证了角度引导策略的有效性。
4. 技术特点与优势
- 多算法融合:结合图论(MAKLINK + Dijkstra)的全局可行性保障与群体智能(ACO)的局部精细优化能力;
- 几何感知优化:改进算法引入路径几何特性(转向角)作为启发信息,使路径更符合实际运动约束;
- 参数可配置:蚁群规模、迭代次数、信息素更新率等关键参数均可调整,便于适配不同应用场景;
- 模块化设计:核心功能(如选择策略、适应度计算)封装为独立函数,便于扩展与维护;
- 结果可复现:所有输入数据(障碍物、连接线、可达矩阵)外部化,确保实验可重复。
5. 应用前景
本系统为二维静态环境下的路径规划提供了一套完整、高效、高质量的解决方案。未来可进一步扩展至:
- 动态障碍物环境(引入时间维度);
- 三维空间路径规划;
- 多目标优化(如同时考虑路径长度、能耗、隐蔽性等);
- 与实时传感器数据融合,实现在线重规划。
该框架为智能体在复杂环境中的自主导航奠定了坚实的技术基础。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 16
16 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)