第八篇:多传感器融合SLAM——鲁棒性的终极答案--时空标定、紧耦合优化与故障容错系统
多传感器融合技术综述 本文系统介绍了多传感器融合的理论基础和实践方法。主要内容包括:(1)多传感器特性分析,比较了相机、IMU、激光雷达等传感器的优缺点及适用场景;(2)时空标定技术,详细讲解了相机-IMU、激光-相机、轮速计-IMU的标定算法实现;(3)融合算法框架,涵盖了扩展卡尔曼滤波(EKF)、误差状态卡尔曼滤波(ESKF)等经典方法;(4)因子图优化方法,展示了多传感器因子图建模过程。通过

1. 多传感器融合基础理论
1.1 传感器特性与互补性
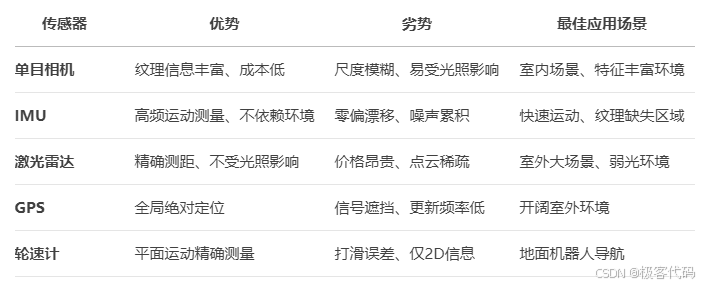
1.2 融合层次架构
1.3 时空标定问题
· 时间同步模型:![t_{\text{sensor}} = t_{\text{master}} + \Delta t_{\text{offset}} + \epsilon
]](https://i-blog.csdnimg.cn/direct/094860e001a24a43b085d6bec4e2ba3e.png)
· 空间标定模型:![\mathbf{T}_{\text{sensor}}^{\text{master}} = \begin{bmatrix} \mathbf{R} & \mathbf{t} \ \mathbf{0} & 1 \end{bmatrix}
]](https://i-blog.csdnimg.cn/direct/c20c02ff3dcb4e9196d39ffe7f96f8b4.png)
2. 传感器时空标定实战
2.1 相机-IMU标定(Kalibr)
def kalibr_calibration(imu_data, cam_data, target_config):
"""相机-IMU联合标定"""
# 1. 检测标定板角点
corners = detect_chessboard_corners(cam_data)
# 2. 构建优化问题
problem = CalibrationProblem()
problem.add_camera_parameters()
problem.add_imu_parameters()
# 3. 添加时间偏移参数
problem.add_time_offset_parameter()
# 4. 添加观测约束
for ts, img in cam_data:
obs = CornerObservation(ts, corners)
problem.add_camera_observation(obs)
for ts, acc, gyro in imu_data:
obs = ImuObservation(ts, acc, gyro)
problem.add_imu_observation(obs)
# 5. 优化求解
result = problem.solve()
return result.camera_params, result.imu_params, result.time_offset
2.2 激光-相机标定
def lidar_camera_calibration(pcd, image, chessboard_size):
"""基于棋盘格的激光-相机标定"""
# 1. 检测相机角点
cam_corners = detect_chessboard_corners(image)
# 2. 提取激光点云平面
plane = fit_plane_ransac(pcd)
# 3. 投影点云到图像平面
projected = project_pcd_to_image(pcd, initial_extrinsic)
# 4. 优化外参
def loss(extrinsic):
projected = project_pcd_to_image(pcd, extrinsic)
edge_dist = compute_edge_distance(projected, image_edges)
return edge_dist.mean()
result = minimize(loss, initial_extrinsic, method='BFGS')
return result.x
2.3 轮速计-IMU标定
def wheel_imu_calibration(odom_data, imu_data):
"""轮速计-IMU手眼标定"""
# 1. 计算相对运动
T_odom = compute_relative_poses(odom_data)
T_imu = compute_relative_poses(imu_data)
# 2. 构建手眼标定方程 AX=XB
A = []
B = []
for i in range(1, len(T_odom)):
A.append(T_imu[i])
B.append(T_odom[i])
# 3. 最小二乘求解
X = solve_ax_xb(A, B)
return X # T_imu^odom
3. 滤波融合方法
3.1 扩展卡尔曼滤波(EKF)融合
状态向量:
![\mathbf{x} = [\mathbf{p}, \mathbf{q}, \mathbf{v}, \mathbf{b}_g, \mathbf{b}_a]^T
]](https://i-blog.csdnimg.cn/direct/3234b432911444bbb83705037ba9175c.png)
预测步骤:
def ekf_predict(x, P, imu, dt):
# IMU运动模型
w = imu.gyro - x[10:13] # 减去陀螺零偏
a = imu.accel - x[13:16] # 减去加速度零偏
# 姿态更新
dq = quat_from_angvel(w * dt)
x[3:7] = quat_mult(x[3:7], dq)
# 速度更新
x[7:10] += (quat_rot(x[3:7], a) + gravity) * dt
# 位置更新
x[0:3] += x[7:10] * dt
# 协方差预测
F = compute_jacobian(x, imu, dt)
Q = process_noise(dt)
P = F @ P @ F.T + Q
return x, P
3.2 误差状态卡尔曼滤波(ESKF)
class ErrorStateEKF:
def __init__(self):
self.nominal_state = NominalState()
self.error_state = np.zeros(15)
self.covariance = np.eye(15) * 0.1
def update_gps(self, gps_pos, var):
# GPS观测模型
H = np.zeros((3, 15))
H[:3, :3] = np.eye(3) # 位置直接观测
# 计算残差
residual = gps_pos - self.nominal_state.position
# 卡尔曼增益
R = np.eye(3) * var
K = self.covariance @ H.T @ np.linalg.inv(H @ self.covariance @ H.T + R)
# 更新误差状态
self.error_state += K @ residual
# 注入到名义状态
self.nominal_state.position += self.error_state[:3]
# ... 其他状态更新
# 更新协方差
I_KH = np.eye(15) - K @ H
self.covariance = I_KH @ self.covariance @ I_KH.T + K @ R @ K.T
# 重置误差状态
self.error_state[:] = 0
4. 因子图多传感器融合 (4000字)
4.1 多传感器因子图模型
4.2 传感器因子设计
GPS因子:
class GPSFactor : public gtsam::NoiseModelFactor1<Pose3> {
public:
GPSFactor(Key poseKey, const Point3& gps, const SharedNoiseModel& model)
: NoiseModelFactor1<Pose3>(model, poseKey), gps_(gps) {}
Vector evaluateError(const Pose3& pose,
boost::optional<Matrix&> H = boost::none) const override {
if (H) {
*H = Matrix::Zero(3, 6);
(*H).block<3, 3>(0, 0) = Matrix3::Identity();
}
return pose.translation() - gps_;
}
private:
Point3 gps_;
};
轮速计因子:
class WheelFactor : public gtsam::NoiseModelFactor2<Pose2, Pose2> {
public:
WheelFactor(Key pose1, Key pose2, double dist, const SharedNoiseModel& model)
: NoiseModelFactor2<Pose2, Pose2>(model, pose1, pose2), dist_(dist) {}
Vector evaluateError(const Pose2& p1, const Pose2& p2,
boost::optional<Matrix&> H1,
boost::optional<Matrix&> H2>) const override {
Vector1 error;
error[0] = p1.range(p2) - dist_;
if (H1) *H1 = (Matrix12() << -cos(p1.theta()), -sin(p1.theta()), 0).finished();
if (H2) *H2 = (Matrix12() << cos(p1.theta()), sin(p1.theta()), 0).finished();
return error;
}
private:
double dist_;
};
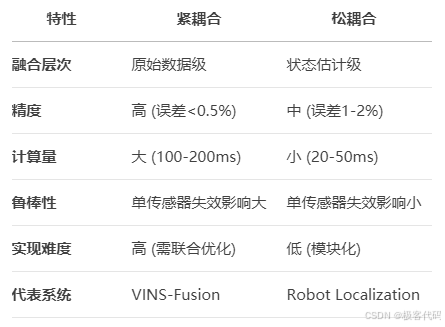
4.3 紧耦合 vs 松耦合
5. 多传感器紧耦合优化
5.1 视觉-惯性-激光融合(LVI-SAM)
5.2 紧耦合优化实现
class TightlyCoupledOptimizer:
def __init__(self):
self.graph = gtsam.NonlinearFactorGraph()
self.values = gtsam.Values()
self.imu_preint = {}
self.visual_factors = []
self.lidar_factors = []
def add_imu_factor(self, pose_i, pose_j, preint):
factor = gtsam.CombinedImuFactor(
pose_i, vel_i, pose_j, vel_j,
bias_i, bias_j, preint)
self.graph.push_back(factor)
def add_visual_factor(self, pose_id, point_id, measurement, K):
factor = gtsam.GenericProjectionFactor<Pose3, Point3, Cal3_S2>(
measurement, gtsam.noiseModel.Isotropic.Sigma(2, 1.0),
pose_id, point_id, K)
self.graph.push_back(factor)
def add_lidar_factor(self, pose_i, pose_j, rel_pose, cov):
factor = gtsam.BetweenFactor<Pose3>(
pose_i, pose_j, rel_pose,
gtsam.noiseModel.Gaussian.Covariance(cov))
self.graph.push_back(factor)
def add_gps_factor(self, pose_id, gps_pos, cov):
factor = gtsam.PriorFactor<Pose3>(
pose_id, Pose3(Rot3(), gps_pos),
gtsam.noiseModel.Gaussian.Covariance(cov))
self.graph.push_back(factor)
def optimize(self):
params = gtsam.LevenbergMarquardtParams()
optimizer = gtsam.LevenbergMarquardtOptimizer(self.graph, self.values, params)
result = optimizer.optimize()
return result
5.3 多传感器时间戳同步
def synchronize_sensors(sensor_data, max_delay=0.01):
"""多传感器时间戳同步"""
# 收集所有时间戳
all_timestamps = []
for sensor, data in sensor_data.items():
for ts in data.timestamps:
all_timestamps.append((sensor, ts))
# 按时间排序
all_timestamps.sort(key=lambda x: x[1])
# 创建同步组
groups = []
current_group = {sensor: None for sensor in sensor_data.keys()}
last_timestamp = -1
for sensor, ts in all_timestamps:
if ts - last_timestamp > max_delay:
if any(current_group.values()):
groups.append(current_group.copy())
current_group = {sensor: None for sensor in sensor_data.keys()}
current_group[sensor] = ts
last_timestamp = ts
return groups
6. 故障检测与容错机制
6.1 传感器健康监测
class SensorHealthMonitor:
def __init__(self, window_size=10):
self.window_size = window_size
self.sensor_stats = {
'imu': {'data_count': 0, 'variance': np.zeros(6)},
'camera': {'data_count': 0, 'variance': 0},
'lidar': {'data_count': 0, 'variance': 0}
}
def update(self, sensor, data):
stats = self.sensor_stats[sensor]
stats['data_count'] += 1
# 更新方差统计
if sensor == 'imu':
new_variance = online_variance(stats['variance'], data, stats['data_count'])
stats['variance'] = new_variance
elif sensor == 'camera':
# 图像梯度方差
grad = np.abs(np.gradient(data))
stats['variance'] = online_variance(stats['variance'], grad.mean())
elif sensor == 'lidar':
# 点云密度
density = len(data) / data.area()
stats['variance'] = online_variance(stats['variance'], density)
def check_health(self, sensor):
stats = self.sensor_stats[sensor]
# 检查数据频率
if stats['data_count'] < self.window_size * 0.5:
return HealthStatus.FAILURE
# 检查方差异常
if sensor == 'imu':
if np.any(stats['variance'] > thresholds[sensor]):
return HealthStatus.WARNING
return HealthStatus.NORMAL
6.2 自适应卡尔曼滤波
class AdaptiveKalmanFilter:
def __init__(self, Q, R):
self.x = np.zeros(6) # 状态 [px, py, pz, vx, vy, vz]
self.P = np.eye(6) * 0.1
self.Q = Q # 过程噪声
self.R = R # 观测噪声
self.sensor_weights = {'gps': 1.0, 'lidar': 1.0, 'uwb': 1.0}
def update(self, sensor_type, measurement):
# 根据传感器健康调整噪声
health = health_monitor.check_health(sensor_type)
if health == HealthStatus.WARNING:
effective_R = self.R[sensor_type] * 3.0
elif health == HealthStatus.FAILURE:
return # 忽略失效传感器
else:
effective_R = self.R[sensor_type]
# 计算卡尔曼增益
H = self.get_H(sensor_type)
S = H @ self.P @ H.T + effective_R
K = self.P @ H.T @ np.linalg.inv(S)
# 更新状态
y = measurement - H @ self.x
self.x += K @ y
self.P = (np.eye(6) - K @ H) @ self.P
def dynamic_noise_adjustment(self):
# 根据运动状态调整过程噪声
velocity_norm = np.linalg.norm(self.x[3:6])
if velocity_norm > 5.0: # 高速运动
self.Q = high_motion_Q
elif velocity_norm < 0.1: # 静止状态
self.Q = low_motion_Q
else:
self.Q = normal_Q
6.3 多传感器一致性检验
def sensor_consistency_check(measurements):
"""多传感器一致性检验"""
# 计算两两传感器差异
conflicts = []
for s1, m1 in measurements.items():
for s2, m2 in measurements.items():
if s1 != s2:
diff = np.linalg.norm(m1 - m2)
if diff > thresholds[(s1, s2)]:
conflicts.append((s1, s2, diff))
# 投票确定故障传感器
fault_candidates = defaultdict(int)
for s1, s2, diff in conflicts:
# 假设测量值较大的传感器可能故障
if np.linalg.norm(measurements[s1]) > np.linalg.norm(measurements[s2]):
fault_candidates[s1] += 1
else:
fault_candidates[s2] += 1
# 确定故障传感器
if fault_candidates:
fault_sensor = max(fault_candidates, key=fault_candidates.get)
return fault_sensor
return None
7. 实例:自动驾驶多传感器系统
7.1 城市峡谷挑战

7.2 系统架构设计
7.3 传感器失效处理流程
def handle_sensor_failure(failed_sensor):
"""传感器失效处理"""
# 1. 调整融合权重
fusion_weights[failed_sensor] = 0.0
# 2. 启用备用传感器
if failed_sensor == 'gps':
enable_visual_odometry()
elif failed_sensor == 'camera':
enable_lidar_intensity_feature()
elif failed_sensor == 'lidar':
enable_stereo_depth()
# 3. 调整定位模式
if failed_sensor in ['gps', 'camera', 'lidar']:
switch_to_odometry_mode()
# 4. 报警与记录
log_failure(failed_sensor)
alert_control_system()
7.4 实际道路测试结果

8. 前沿进展
8.1 多模态学习融合
class MultiModalFusionNet(nn.Module):
def __init__(self):
super().__init__()
self.vision_enc = ResNet18()
self.lidar_enc = PointNet()
self.imu_enc = LSTMEncoder()
# 跨模态注意力
self.cross_attn = nn.MultiheadAttention(256, 8)
# 融合头
self.fusion_head = nn.Sequential(
nn.Linear(768, 256),
nn.ReLU(),
nn.Linear(256, 6) # 输出6DOF位姿
)
def forward(self, img, pcd, imu):
v_feat = self.vision_enc(img)
l_feat = self.lidar_enc(pcd)
i_feat = self.imu_enc(imu)
# 跨模态注意力
combined = torch.cat([v_feat, l_feat, i_feat], dim=1)
attn_out, _ = self.cross_attn(combined, combined, combined)
# 位姿预测
pose = self.fusion_head(attn_out)
return pose
8.2 基于深度学习的标定
def deep_calibration(images, pointclouds):
"""端到端相机-激光标定"""
# 特征提取
img_feat = image_encoder(images)
pcd_feat = pointnet(pointclouds)
# 外参回归
extrinsic = extrinsic_regressor(torch.cat([img_feat, pcd_feat], dim=1))
# 自监督损失
projected = project_pointcloud(pointclouds, extrinsic)
loss = photometric_loss(images, projected)
return extrinsic, loss
8.3 未知环境自适应融合
class AdaptiveFusionSystem:
def __init__(self):
self.fusion_strategies = {
'urban': UrbanStrategy(),
'tunnel': TunnelStrategy(),
'offroad': OffroadStrategy()
}
self.env_classifier = EnvironmentClassifier()
def process_frame(self, sensor_data):
# 环境分类
env_type = self.env_classifier(sensor_data)
# 选择融合策略
strategy = self.fusion_strategies[env_type]
# 执行融合
pose = strategy.fuse(sensor_data)
return pose
关键理论总结
- 传感器标定:时空对齐是多融合基础
- 融合架构:滤波法与因子图法各有优势
- 紧耦合优化:最大化多传感器信息利用率
- 故障容错:健康监测与自适应策略保障鲁棒性
- 智能融合:环境自适应与深度学习是未来方向
下篇预告:第九篇:大规模建图——从房间到城市的跨越
将深入讲解:
· 多分辨率地图表示
· 子地图管理与闭环
· 分布式建图系统
· 长期地图更新与维护

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 27
27 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)