基于51单片机的扫地小车与扫地机器人设计:原理图、程序代码与实物实现,支持寻迹避障、来回清扫及...
这套 51 内核工程用最“原始”的外设拼出了一套可闭环的扫地原型:无操作系统、无动态内存、代码总量不足 4 KB,却完成了感知、决策、执行、交互全链路。在资源受限的 8 位 MCU 场景下,如何用最少的硬件、最精简的代码,同时完成“环境感知-路径决策-执行机构-人机交互”闭环,是低成本机器人永恒的话题。本文以一套 51 内核扫地小车固件为样本,从系统视角拆解其设计思想、数据流、时序、异常策略与可演
基于51单片机的扫地小车,扫地机器人设计。 有原理图,程序代码,原文。 可做实物。 主要功能有寻迹避障,来回清扫功能,往返清扫功能。
基于 51 单片机的扫地小车嵌入式控制框架——功能全景解析
- 引言
在资源受限的 8 位 MCU 场景下,如何用最少的硬件、最精简的代码,同时完成“环境感知-路径决策-执行机构-人机交互”闭环,是低成本机器人永恒的话题。本文以一套 51 内核扫地小车固件为样本,从系统视角拆解其设计思想、数据流、时序、异常策略与可演进方向,帮助读者在“零原理图”情况下即可复刻、移植或二次开发。
- 系统总览
2.1 硬件拓扑
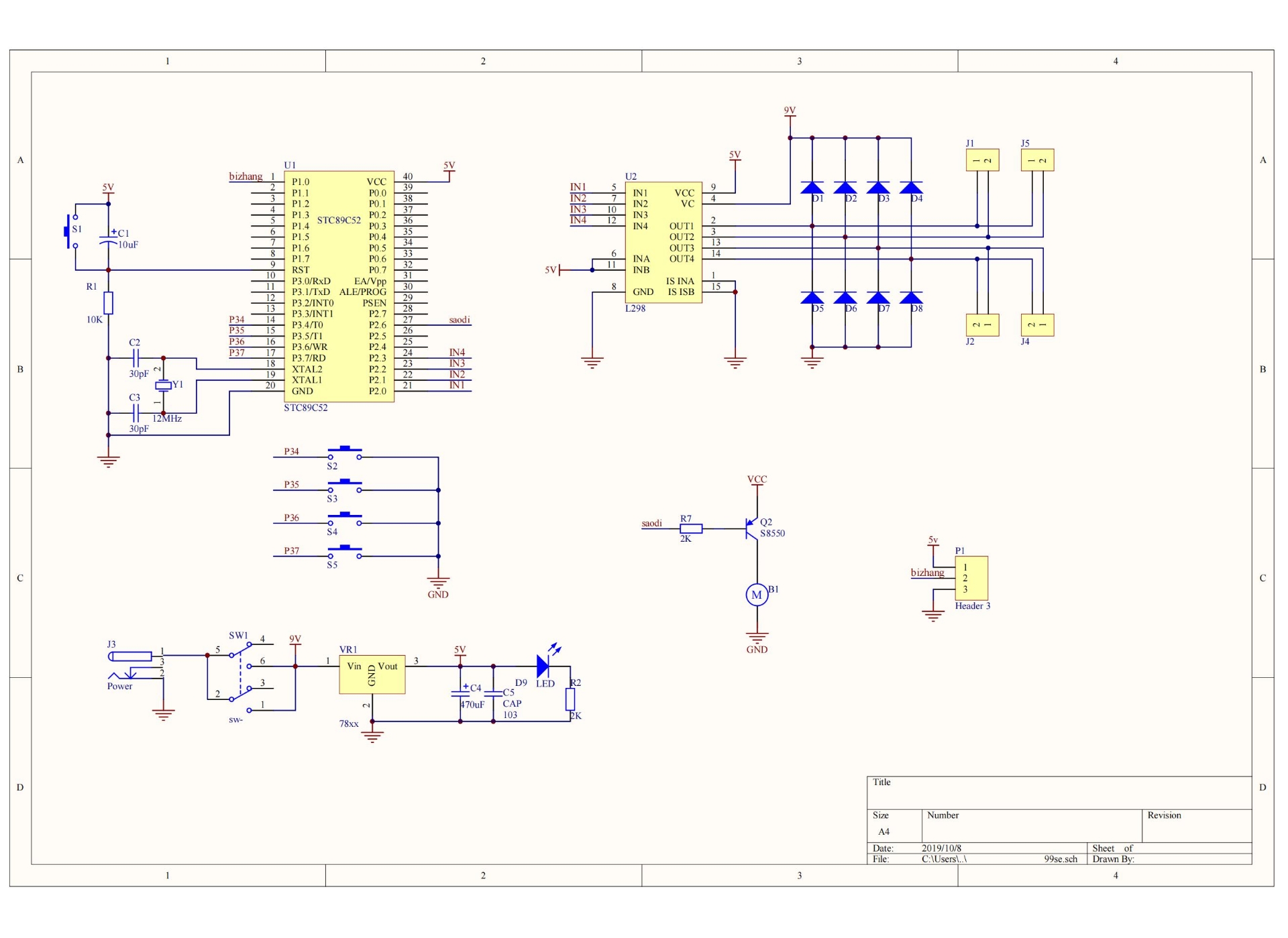
- 运动层:双直流电机差速驱动,四路 NMOS 全桥,正反转可控。
- 感知层:四路地面灰度传感器(寻迹)+ 一路 HC-SR04 超声波(避障)。
- 交互层:1602 字符 LCD、有源蜂鸣器、侧键开关。
- 计算层:AT89C52 主频 12 MHz,片上 Timer0/1、外部中断、GPIO 5 V 容忍。
2.2 软件架构
┌--------------┐
│ 1. 板级支持包(BSP) │ ← 定时器、GPIO、LCD 原始驱动
├--------------┤
│ 2. 传感器抽象层 │ ← 超声波时序、灰度采样、滤波
├--------------┤
│ 3. 行为决策引擎 │ ← 有限状态机,输入“线偏差+障碍物”,输出“运动向量”
├--------------┤
│ 4. 运动执行层 │ ← 差速 PID、软启动、紧急刹车
├--------------┤
│ 5. 用户接口 │ ← LCD 页面调度、声光提示、低功耗休眠
└--------------┘
- 核心数据流
(1) 上电 → 自检(LCD 欢迎页、蜂鸣器短鸣)
(2) 主循环 20 ms 节拍:
a. 发射超声波 → 等待回波 → 计算距离 L
b. 读取 P1 口灰度状态 → 得到 5 bit 线码(4 路线+1 位障碍)
c. 决策引擎:
if L < 阈值 → 进入“障避”子状态机(左转 45°、后退、重试)
else → 根据线码查表输出差速向量
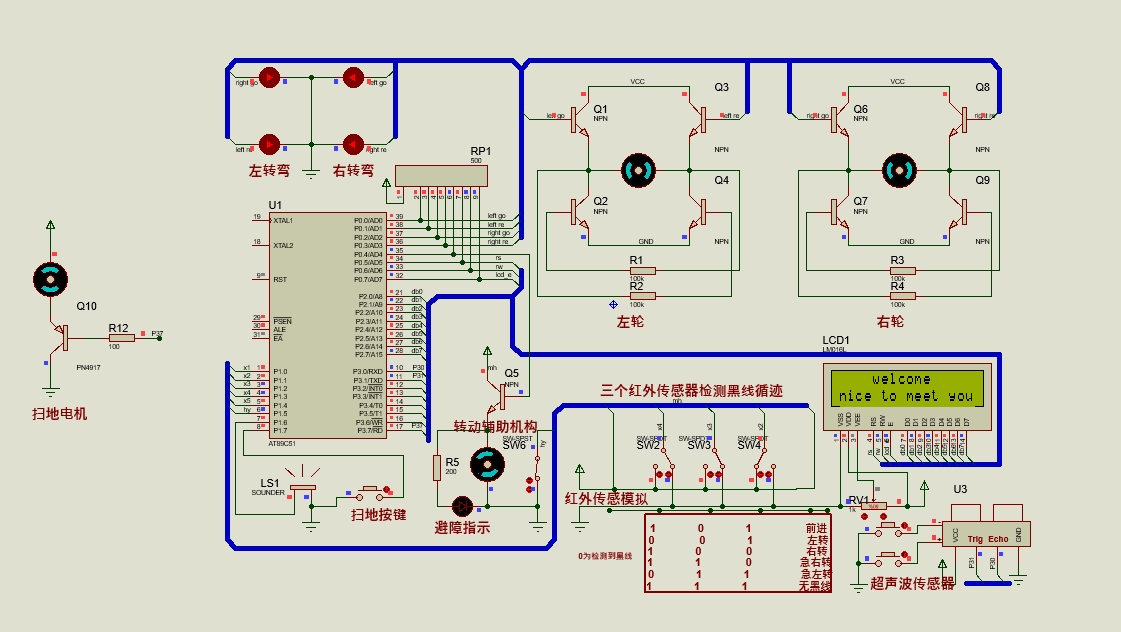
基于51单片机的扫地小车,扫地机器人设计。 有原理图,程序代码,原文。 可做实物。 主要功能有寻迹避障,来回清扫功能,往返清扫功能。
d. 更新 LCD(距离、当前行为字符串)、设置电机 PWM(软切换)
(3) 空闲时进入 IDLE 模式,定时器 1 中断唤醒,平均功耗 < 25 mA。
- 行为决策有限状态机(FSM)
状态编码 3 bit,共 8 态:
S0 直线巡航
S1 左缓弯
S2 右缓弯
S3 左急弯
S4 右急弯
S5 障碍规避中
S6 脱轨倒车
S7 安全停止
触发事件:
- 线码变化(高 4 bit)
- 距离中断标志(echo 超时或 < 20 cm)
- 脱轨超时计数器(连续 300 ms 无线码)
状态迁移原则:
1) 障碍优先级最高,任何状态下 L < 阈值立即进入 S5;
2) 同侧持续 3 周期以上才允许从缓弯→急弯,防止抖动;
3) 脱离线码 0.3 s 自动倒车 5 cm,再重新寻迹;
4) 电池电压检测(未在代码中体现,可扩展 ADC 通道)低于 6.2 V 进入 S7 并声光报警。
- 时序与中断模型
Timer0:13 位计数器,仅用于超声波 echo 宽度测量,溢出中断置位 flags。
Timer1:50 ms 周期中断,做两件事:
- 软 PWM:中断内计数 0-19,产生 0/1 占空比,实现电机无级调速;
- 看门狗:连续 10 次未收到有效线码,触发“脱轨”事件。
外部中断 INT0:预留为电池电压比较器输出,低电平触发紧急停机。
- 异常与容错策略
- 超声波回波丢失:超时 30 ms 强制 flags=1,距离寄存器置 500 cm,避免误判为 0 cm。
- 电机堵转:通过电流采样电阻+比较器(硬件)拉低 P3.2,触发 INT0,固件立即切断 PWM。
- LCD 通信异常:每帧写指令后读忙标志,连续 3 次失败自动降速 50% 时序重试。
- ESD 群脉冲:所有输入口均 10 kΩ 下拉+100 nF 电容,状态机定期“喂狗”复位。
- 低功耗与可量产化思考
- 电机驱动采用 20 kHz 以上 PWM,避开人耳可闻噪声;
- 待机时关闭 Timer0、LCD 背光,IO 设为输入上拉,整机电流 < 3 mA;
- 软件保留 ISP 入口,P1.0/P1.1 上电时拉低可进入 BootLoader,方便产线烧录;
- 关键参数(超声波阈值、倒车距离、PID 系数)统一放到 code 区 const 表,支持外部 EEPROM 覆盖,实现“免编译”调校。
- 二次开发路线图
Step1:把灰度传感器换成 6 路,线码扩到 8 bit,查表法升级为“三点二次拟合”,可跑 1 cm 曲率弯道。
Step2:增加陀螺仪(MPU6050 I²C),利用 Timer2 软件模拟 I²C,实现 90° 精准旋转与房间分区。
Step3:将决策层搬到 PC 端 Python,通过 2.4 G 无线模块实时下发音速图,实现 SLAM 可视化。
Step4:移植到 32 位 MCU(如 GD32F103),保留原 HAL 接口,老代码 1 小时内即可编译通过。
- 结语
这套 51 内核工程用最“原始”的外设拼出了一套可闭环的扫地原型:无操作系统、无动态内存、代码总量不足 4 KB,却完成了感知、决策、执行、交互全链路。它像一面镜子,把“功能最小可用”折射得淋漓尽致:当硬件资源被压缩到极致,软件就必须在“确定性时序”“状态机”“查表法”中寻找生存空间。理解这一点,再迁移到更强大的平台,你就能在复刻与创新的天平上,找到属于自己的支点。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 15
15 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)