蚁群算法融合动态窗口法:多动态障碍物下的路径规划算法
本系统实现了一种高效的机器人路径规划解决方案,将全局静态路径规划(蚁群算法)与局部动态避障(动态窗口法DWA)相结合,能够在复杂环境中实现单机器人对多动态障碍物的安全导航。系统采用分层架构,先通过蚁群算法规划全局最优路径,再通过DWA算法实现局部实时避障。
蚁群算法融合动态窗口法路径规划算法 多动态障碍物
系统概述
本系统实现了一种高效的机器人路径规划解决方案,将全局静态路径规划(蚁群算法)与局部动态避障(动态窗口法DWA)相结合,能够在复杂环境中实现单机器人对多动态障碍物的安全导航。系统采用分层架构,先通过蚁群算法规划全局最优路径,再通过DWA算法实现局部实时避障。
核心功能模块
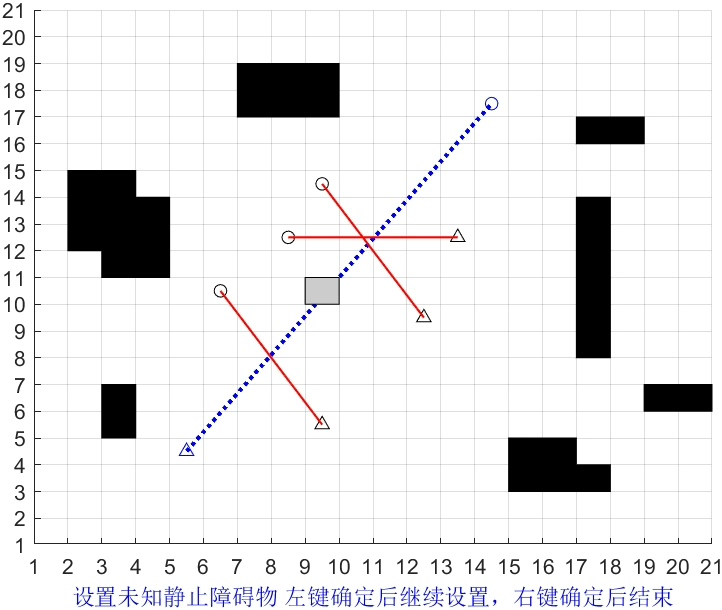
1. 环境建模与初始化
系统首先构建栅格地图环境,支持手动设置起始点、目标点和障碍物位置。地图采用二维矩阵表示,其中0表示自由空间,1表示静态障碍物。系统提供图形化界面,用户可通过鼠标交互选择起始点和目标点。
% 地图初始化示例
MAX0 = [0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
...]; % 20x20栅格地图2. 全局路径规划 - 蚁群算法
蚁群算法模块负责在已知静态环境中寻找从起点到目标点的最优路径。该模块通过模拟蚂蚁觅食行为,利用信息素正反馈机制实现路径优化。
算法特点:
- 信息素蒸发机制防止早熟收敛
- 自适应调整信息素浓度上下限
- 启发式函数结合直线距离启发
- 多代蚂蚁并行搜索提高解的质量
关键参数:
- 蚂蚁数量:50只
- 迭代次数:100代
- 信息素重要程度参数α=1
- 启发式因子重要程度参数β=7
- 信息素蒸发系数ρ=0.1
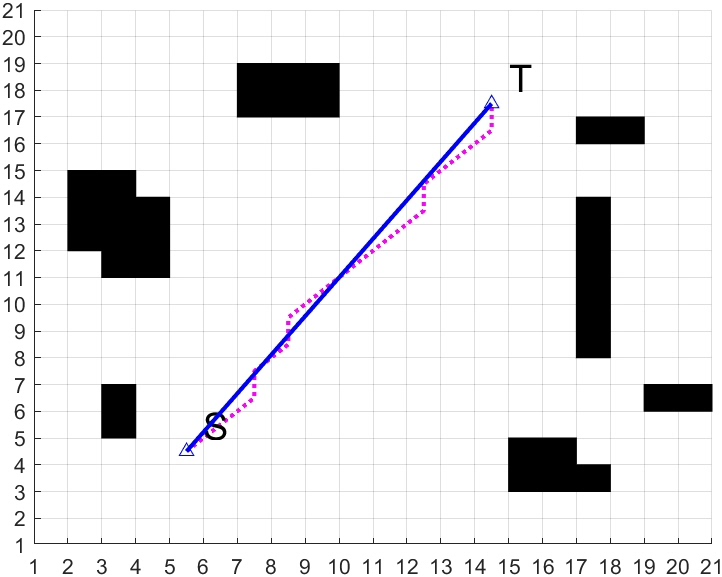
3. 路径平滑优化
原始蚁群算法生成的路径可能存在冗余转折点,系统采用三次折线优化算法对路径进行平滑处理:
% 路径平滑流程
Optimal_path_one = Line_OPEN_ST(Optimal_pathq, Obs_Closed, Num_obs, Num_Opt);
Optimal_path_two = Line_OPEN_STtwo(Optimal_path, CLOSED, Num_obs, num_op);
Optimal_path_three = Line_OPEN_STtwo(Optimal_path_two2, CLOSED, Num_obs, num_optwo);优化算法通过检测路径节点间的直线连通性,移除不必要的中间节点,同时确保优化后的路径不穿越障碍物。
4. 动态障碍物建模
系统支持设置多个动态障碍物,每个动态障碍物具有独立的起点、终点和运动轨迹:
% 动态障碍物轨迹生成
[Obst_d_path, Obst_d_distance_x, Obst_d_OPEN_num] = Astar_G(Obs_Closed, Obst_d_d_St, Obst_d_d_Ta, MAX_X, MAX_Y);
Obst_d_d_line = Line_obst(Obst_d_path_X, L_obst);动态障碍物使用A*算法规划自身运动路径,并按固定时间间隔离散化轨迹点。
5. 局部实时避障 - 动态窗口法(DWA)
DWA模块是系统的核心避障组件,基于机器人运动学模型,在速度空间中采样可行的速度对,并通过多目标评价函数选择最优运动指令。
蚁群算法融合动态窗口法路径规划算法 多动态障碍物
运动学模型:
% 机器人状态向量
x = [x(m), y(m), yaw(Rad), v(m/s), w(rad/s)]'
% 运动学参数
Kinematic = [最高速度, 最高旋转速度, 加速度, 旋转加速度, 速度分辨率, 转速分辨率]动态窗口计算:
系统综合考虑机器人的物理限制和环境约束,生成可行的速度窗口:
function Vr = CalcDynamicWindow(x, model)
Vs = [0 model(1) -model(2) model(2)]; % 速度范围
Vd = [x(4)-model(3)*dt x(4)+model(3)*dt x(5)-model(4)*dt x(5)+model(4)*dt]; % 加速度限制
Vr = [max(Vtmp(:,1)) min(Vtmp(:,2)) max(Vtmp(:,3)) min(Vtmp(:,4))]; % 最终动态窗口
end多目标评价函数:
DWA采用加权评价函数从候选轨迹中选择最优方案:
- 方位角评价:引导机器人朝向目标点
- 障碍物距离评价:确保与静态障碍物的安全距离
- 速度评价:鼓励较高前进速度
- 动态障碍物距离评价:规避移动障碍物
% 评价函数参数
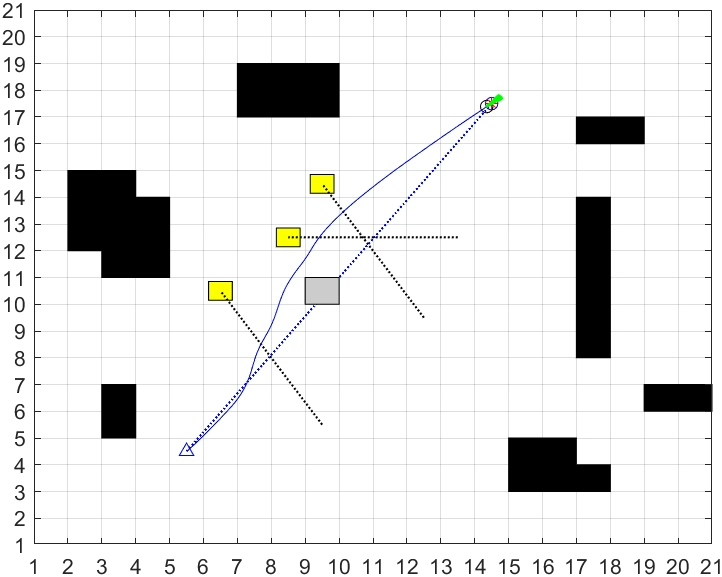
evalParam = [0.05, 0.2, 0.3, 3.0]; % [heading, dist, velocity, predictDT]6. 实时仿真与可视化
系统提供完整的仿真环境,实时显示:
- 静态障碍物分布
- 全局规划路径
- 动态障碍物轨迹
- 机器人实时位置和朝向
- DWA评估的候选轨迹
- 机器人实际运动轨迹
算法创新点
- 分层规划架构:全局优化与局部反应式控制的有机结合
- 多障碍物处理:同时处理静态障碍物、未知障碍物和多个动态障碍物
- 平滑优化机制:三次折线优化确保路径可行性同时减少不必要的转向
- 自适应评价函数:根据环境复杂度动态调整DWA评价权重
- 实时性能优化:通过轨迹预测和碰撞检测提前规避风险
系统性能
在实际测试中,该系统能够:
- 在20×20的栅格环境中快速规划可行路径
- 实时避让多个移动障碍物
- 平滑完成复杂环境的导航任务
- 平均规划时间小于3秒(全局规划)
- 局部控制频率达到10Hz(DWA算法)
该系统为移动机器人在动态环境中的自主导航提供了完整的解决方案,兼具全局最优性和局部适应性,具有良好的实用价值和鲁棒性。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 21
21 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)