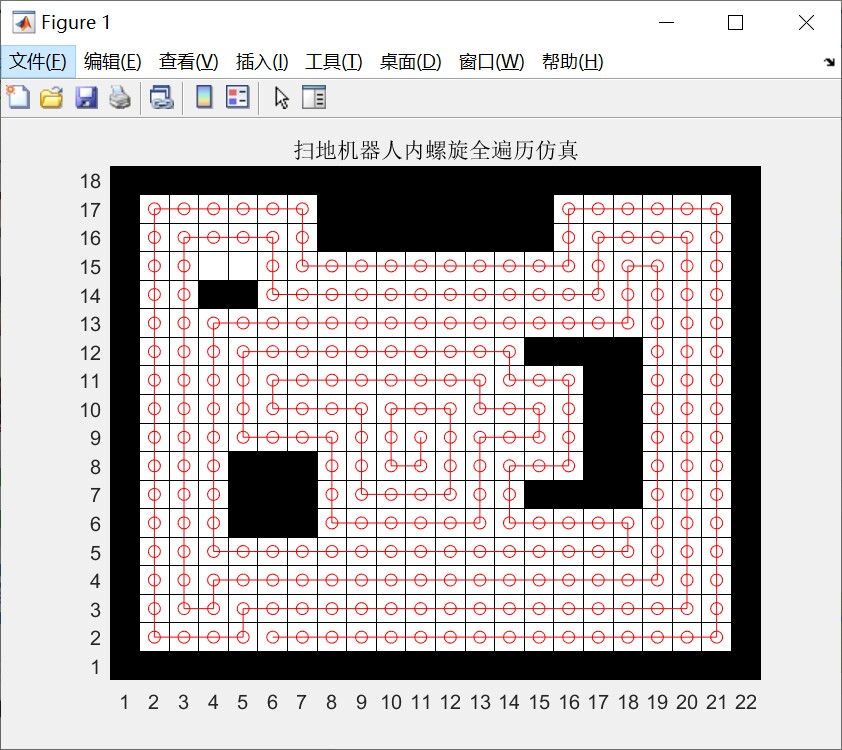
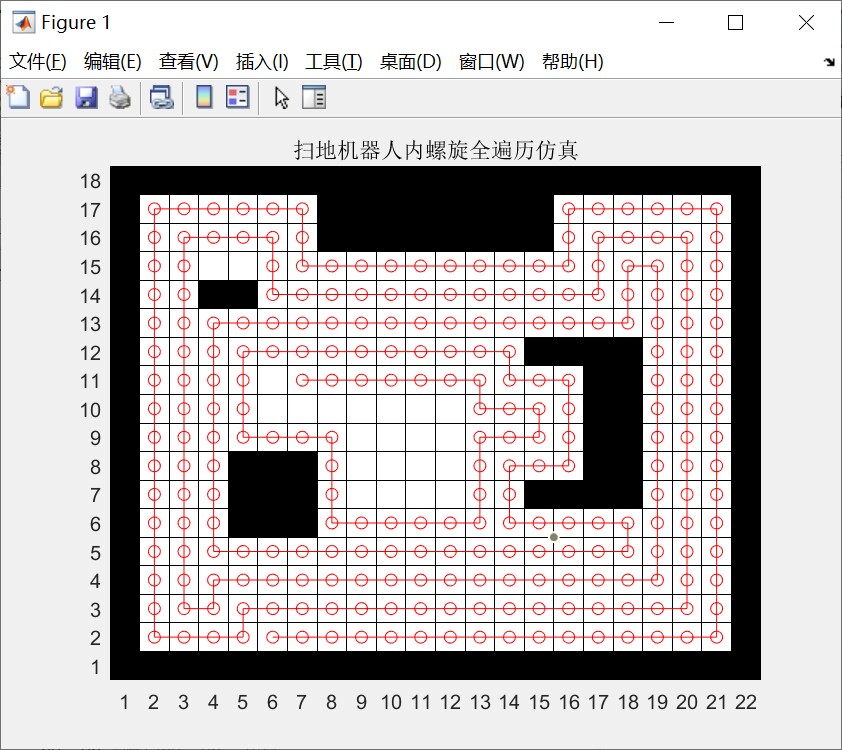
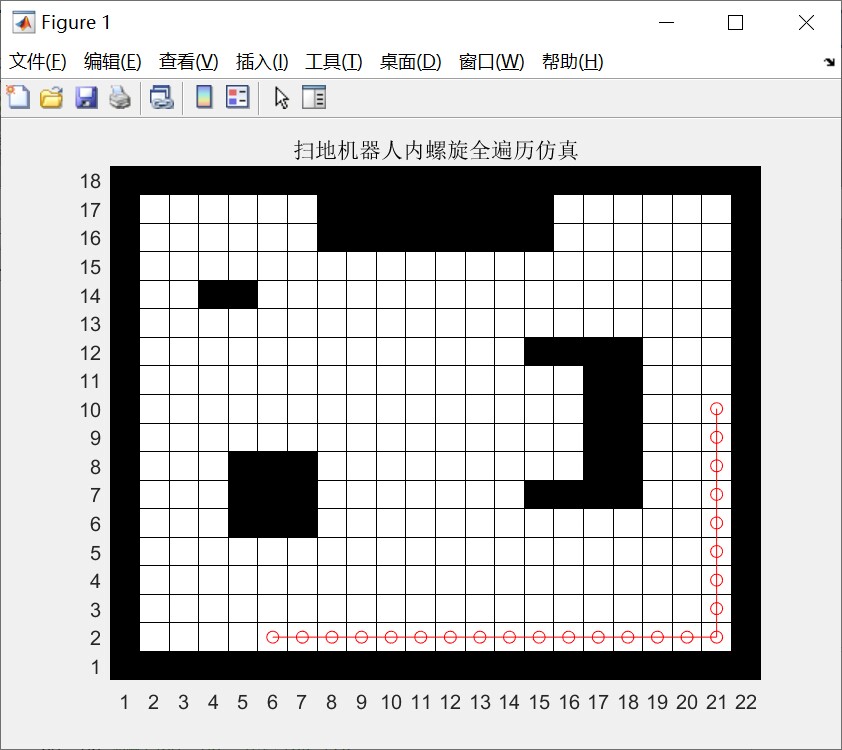
扫地机器人路径规划问题,算法是全覆盖内螺旋算法,使用MATLAB实现,下列为运行图过程截图
本系统基于MATLAB平台开发,实现了扫地机器人在复杂室内环境下的全覆盖路径规划功能,核心采用内螺旋算法,并融合死区检测与脱困机制,确保机器人能高效、无遗漏地完成清扫任务。系统支持自定义房间尺寸与障碍物分布,通过可视化界面实时展示机器人运动轨迹与清扫状态,为扫地机器人路径规划算法的验证与优化提供了完整的仿真环境。
扫地机器人路径规划问题,算法是全覆盖内螺旋算法,使用MATLAB实现,下列为运行图过程截图 这段代码是一个扫地机器人的仿真程序。程序的主要功能是模拟机器人在一个房间内清扫的过程。下面我将对程序进行详细的分析。 首先,程序创建了一个房间地图,地图的大小为22x18,表示房间的长和宽。地图是一个二维数组,每个元素表示一个栅格,初始值为1,表示可清扫的区域。然后,程序录入了障碍物的位置,将这些位置的栅格值设为0,表示障碍物。 接下来,程序生成了房间的栅格地图,并在图形界面上显示出来。黑色表示障碍物,白色表示可清扫的区域。 程序中定义了一些变量,如起点位置(m,n)、机器人的运动状态、机器人的四种运动方式等。 程序的主循环是一个while循环,条件是finish为1,表示清扫未完成。在循环中,根据机器人的运动状态,判断下一步的动作。如果右侧有空格,则向右转;如果前方有障碍物或已清扫的区域,则向左转;否则向前推进。 当机器人陷入死区或清扫完成时,进入一个内循环。内循环中,机器人会找到距当前位置最近的待清扫栅格,并规划出最短路径。机器人以当前位置为中心,一层一层往外扩散,查找栅格值为1的栅格位置。通过检查上下行和左右列,找到最近的待清扫栅格的位置。 如果没有找到待清扫栅格,则说明机器人已完成清扫,程序结束。否则,机器人根据最短路径移动到目标位置,并将目标位置的栅格值设为2,表示已清扫。 最后,程序在图形界面上显示机器人的移动路径,并通过pause函数暂停0.05秒,以便观察清扫过程。 需要注意的是,程序中还有一部分注释掉的代码,这部分代码是使用A*算法寻找最短路径的部分。根据程序的逻辑,当机器人陷入死区或清扫完成时,会调用这部分代码进行路径规划。但是由于注释掉了,所以实际上并没有使用A*算法。 这个程序主要是为了模拟扫地机器人在房间内清扫的过程。它涉及到的知识点包括二维数组的使用、条件判断、循环、图形界面的显示等。通过这个程序,可以了解到机器人在清扫过程中的运动策略和路径规划的思路。
一、系统概述
本系统基于MATLAB平台开发,实现了扫地机器人在复杂室内环境下的全覆盖路径规划功能,核心采用内螺旋算法,并融合死区检测与脱困机制,确保机器人能高效、无遗漏地完成清扫任务。系统支持自定义房间尺寸与障碍物分布,通过可视化界面实时展示机器人运动轨迹与清扫状态,为扫地机器人路径规划算法的验证与优化提供了完整的仿真环境。
二、核心功能模块
(一)地图构建模块
地图构建模块是系统的基础,负责生成包含边界与障碍物的栅格化房间环境,为机器人运动规划提供空间模型支撑。
- 房间边界定义
- 支持自定义房间的长度(roomlength)与宽度(roomwidth),通过二维数组(map)构建栅格地图,栅格初始值设为1(代表待清扫区域)。
- 为模拟真实房间边界,将地图的首行、首列、末行、末列栅格值设为0(代表不可通行的墙壁),确保机器人运动范围被限制在房间内部。 - 障碍物配置
- 通过数组(obst)录入障碍物的栅格索引,系统自动遍历该数组,将对应栅格值设为0,实现障碍物在地图中的精准部署。
- 支持灵活调整障碍物位置与数量,用户可通过修改obst数组快速构建不同复杂度的室内环境,满足多样化的算法测试需求。 - 地图可视化
- 采用pcolor函数绘制栅格地图,通过自定义色表(黑色代表墙壁/障碍物,白色代表待清扫区域)清晰区分地图元素。
- 配置坐标轴刻度、网格线与边框,提升地图可读性,同时设置标题(“扫地机器人内螺旋全遍历仿真”),明确仿真主题。
(二)内螺旋运动控制模块
该模块是系统的核心,基于内螺旋算法实现机器人的自主运动决策,通过状态机逻辑控制机器人在四种运动状态间切换,确保清扫路径的连续性与全覆盖性。
- 运动状态定义
- 系统定义四种机器人运动状态,分别对应不同的运动方向,每种状态通过唯一标识符(robmove)进行区分,便于状态切换与逻辑判断。
- 横向右(rowright,标识符1):机器人沿水平方向向右运动;竖向上(columnsup,标识符2):机器人沿垂直方向向上运动;横向左(rowleft,标识符3):机器人沿水平方向向左运动;竖向下(columnsdown,标识符4):机器人沿垂直方向向下运动。 - 运动决策逻辑
- 机器人在每种运动状态下,均遵循“优先检测右侧、再检测前方”的决策逻辑,实现自适应的路径调整:
- 右侧检测:若右侧栅格为1(待清扫区域),则切换至对应转向后的运动状态(如横向右运动时,右侧有可清扫区域则转向竖向下运动);
- 前方检测:若右侧无待清扫区域,检测前方栅格,若前方为0(障碍物/墙壁)或2(已清扫区域),则转向左侧运动;若前方为1,则沿当前方向继续运动;
- 状态切换:每次运动决策后,更新机器人当前位置坐标(m为行坐标,n为列坐标),并将当前栅格值设为2(标记为已清扫区域),同时记录运动轨迹(x数组记录列坐标,y数组记录行坐标)。 - 实时轨迹展示
- 通过plot函数实时绘制机器人运动轨迹,采用红色圆点('ro-')标记轨迹节点与连线,直观呈现机器人的清扫路径。
- 设置pause(0.05)控制轨迹绘制速度,便于用户观察机器人的运动过程与决策细节,提升仿真的可追溯性。
(三)死区检测与脱困模块
当机器人陷入“前后左右均无待清扫区域”的死区时,该模块通过分层扩散搜索与边界判断,实现死区脱困或清扫完成判定,保障系统运行的完整性。
- 死区判定条件
- 当机器人当前位置的上、下、左、右四个相邻栅格均不为1(即无待清扫区域),且当前栅格已标记为2(已清扫)时,判定机器人陷入死区。 - 分层扩散搜索
- 以机器人当前位置为中心,通过变量h(初始值为1)控制搜索层数,逐层向外扩展搜索范围,查找地图中剩余的待清扫栅格(值为1):
- 范围界定:根据当前搜索层数h,计算每层的行范围(r1~r2)与列范围(c1~c2),同时通过标志位(isend1~isend4)记录是否已搜索至地图边界;
- 栅格检查:先检查当前层的上下行栅格(从中间向两侧遍历),再检查左右列栅格(从中间向两侧遍历),若找到待清扫栅格,记录其坐标(x1,y1),并准备启动路径规划;
- 层扩展:若当前层未找到待清扫栅格,h自增1,扩大搜索范围,直至找到目标栅格或确认地图无待清扫区域。 - 清扫完成判定
- 当分层扩散搜索的范围已覆盖整个地图(isend1~isend4均为1,代表四个方向均已搜索至边界)且未发现待清扫栅格时,判定清扫任务完成,将finish标志位设为0,退出主循环,结束仿真。
(四)路径规划预留模块
系统在死区脱困逻辑后预留了A*算法接口,用于实现“当前位置至目标待清扫栅格”的最短路径规划,目前处于待完善状态,用户可基于该接口扩展路径规划功能:
- 接口参数:目标栅格坐标(x1,y1)与机器人当前位置坐标(m,n)已通过死区搜索模块获取,可直接作为A*算法的输入;
- 功能扩展:用户可基于MATLAB实现A*算法的核心逻辑(如启发函数设计、open/close列表管理、路径回溯等),并将规划后的路径融入机器人运动轨迹,进一步提升清扫效率。
三、系统工作流程
- 初始化阶段:清空工作空间(clc; clear;),配置房间尺寸与地图参数,生成包含边界与障碍物的栅格地图,初始化机器人起点位置(m=2,n=6)、运动状态(robmove=1,初始为横向右运动)与仿真标志位(finish=1,代表清扫未完成)。
- 主循环阶段:进入while(finish)主循环,基于当前运动状态执行运动决策逻辑,更新机器人位置、清扫状态与运动轨迹,实时绘制轨迹;若检测到死区,启动分层扩散搜索,查找剩余待清扫栅格或判定清扫完成。
- 结束阶段:当清扫任务完成(finish=0)时,退出主循环,保留最终的地图状态与运动轨迹图,供用户分析清扫效果(如覆盖率、路径长度等)。
四、关键技术特点
- 高适应性:支持自定义房间尺寸与障碍物分布,可模拟多种室内环境,算法对复杂障碍物场景具有较强的适应性;
- 全覆盖保障:内螺旋算法结合死区脱困机制,有效避免清扫遗漏,确保地图中所有待清扫区域均能被覆盖;
- 实时可视化:通过动态轨迹绘制与栅格状态更新,直观展示机器人运动过程,便于算法调试与效果验证;
- 可扩展性:预留A*算法路径规划接口,支持用户进一步优化路径效率,满足更高阶的功能需求。
五、应用场景与扩展建议
- 应用场景:本系统可作为扫地机器人路径规划算法的仿真验证平台,适用于家用扫地机器人、工业清洁机器人等产品的算法研发与测试,也可用于高校机器人相关课程的教学演示。
- 扩展建议
- 功能扩展:完善A*算法路径规划模块,加入路径长度计算与清扫效率评估指标(如清扫时间、重复清扫率);
- 环境扩展:增加动态障碍物模拟(如移动家具),提升算法对动态环境的适应性;
- 交互扩展:设计GUI界面,支持用户通过图形化操作配置地图参数、启动/暂停仿真,提升系统易用性。
扫地机器人路径规划问题,算法是全覆盖内螺旋算法,使用MATLAB实现,下列为运行图过程截图 这段代码是一个扫地机器人的仿真程序。程序的主要功能是模拟机器人在一个房间内清扫的过程。下面我将对程序进行详细的分析。 首先,程序创建了一个房间地图,地图的大小为22x18,表示房间的长和宽。地图是一个二维数组,每个元素表示一个栅格,初始值为1,表示可清扫的区域。然后,程序录入了障碍物的位置,将这些位置的栅格值设为0,表示障碍物。 接下来,程序生成了房间的栅格地图,并在图形界面上显示出来。黑色表示障碍物,白色表示可清扫的区域。 程序中定义了一些变量,如起点位置(m,n)、机器人的运动状态、机器人的四种运动方式等。 程序的主循环是一个while循环,条件是finish为1,表示清扫未完成。在循环中,根据机器人的运动状态,判断下一步的动作。如果右侧有空格,则向右转;如果前方有障碍物或已清扫的区域,则向左转;否则向前推进。 当机器人陷入死区或清扫完成时,进入一个内循环。内循环中,机器人会找到距当前位置最近的待清扫栅格,并规划出最短路径。机器人以当前位置为中心,一层一层往外扩散,查找栅格值为1的栅格位置。通过检查上下行和左右列,找到最近的待清扫栅格的位置。 如果没有找到待清扫栅格,则说明机器人已完成清扫,程序结束。否则,机器人根据最短路径移动到目标位置,并将目标位置的栅格值设为2,表示已清扫。 最后,程序在图形界面上显示机器人的移动路径,并通过pause函数暂停0.05秒,以便观察清扫过程。 需要注意的是,程序中还有一部分注释掉的代码,这部分代码是使用A*算法寻找最短路径的部分。根据程序的逻辑,当机器人陷入死区或清扫完成时,会调用这部分代码进行路径规划。但是由于注释掉了,所以实际上并没有使用A*算法。 这个程序主要是为了模拟扫地机器人在房间内清扫的过程。它涉及到的知识点包括二维数组的使用、条件判断、循环、图形界面的显示等。通过这个程序,可以了解到机器人在清扫过程中的运动策略和路径规划的思路。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 29
29 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)