基于STM32的职场清洁机器人设计
本文设计了一款基于STM32单片机的智能扫地机器人控制系统。通过对比AT89C51和STM32两种方案,选择STM32作为主控芯片,因其具备32位处理、丰富外设、低功耗等优势。系统硬件采用STM32核心板,配合传感器模块实现避障和路径规划功能;软件部分通过Keil开发环境进行编程调试。实验测试表明,该系统能有效控制机器人运动、实现避障功能,并通过调试优化解决了硬件连接错误等问题。整机装配效果良好,
2 主控系统方案设计
2.1整体方案设计
本次研究的产品基于结构和系统的设计。对于前者来讲,主要是运用Solidwords3D制图软件来绘制零件,后者主要是电路的焊接以及之后对于程序的设计和调试,对于硬件的角度电路,指示灯,光耦电路等等;大量数据采集的应用来处理电动机的转速,具体的框架以及思路如图2.1所示: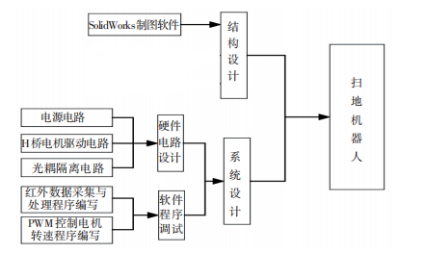
图2.1 系统方案框图
专业课中接触最多的单片机就是AT89C51和STM32,所以在两种单片机中的选择上,我做出了以下比较:
方案一:用C51单片机为核心的主要机器人,基于红外线功能和声波的模块的构成,使扫地机器人具有避障,和可以遥控的这两个核心和功能,通过各个功能的配合,可以使小车通过系统内部的计算来实现精准的避开大部分障碍,使其沿着设定好的轨道工作,即设计小车按照预设黑线循环打扫,LCD实时显示了离障碍距离和运行状态。
方案二:根据各种模块传感的集中交互来完成高效率情节以及保持正确路径的机器人,提高底盘稳定性,在此基础上增加数据之间的计算,这样得以使传感器得到的数据能够更加高效的计算给动力系统,减少对于路面以及障碍物的凹凸不平的表面等带来的误差[4],保证这些,在清洁能力上要有稳定的执行,根据需要清扫的对象的大小形态做出正确的判断之后然后做出相应的对策来完成高成效的对策。同时也在耗能和成本两个关键部分得到舒缓。
对此情况来看的话,STM32其外设更加多样化,也就可以满足各项功能的实施,相比其他单片机而言,增加了更多的定时系统以及多个外部链接的中断功能、PWM模式等一些输入相关的模式[5],使作用范围大大提高,但是C51这种比较传统的老牌单片机,相对比只能控制高低电平而言就更加局限了。
所以,方案二,采用STM32单片机是更好的选择。
3 硬件设计
3.1STM32单片机核心电路设计
基于成本和耗能的双向成本的前提,选用STM32这一类核心处理器,这种处理器是源于ST这家意法半导体公司的一种产品仿真且具有控制的微型设备[6],在实现原有的功能的前提,又为设备增加了更多的外设连接的功能,这样就能设计其他项目所用的其他辅助电路的配合,这种芯片,上手非常容易就能完成单片机所有课程的研修,此外,在其他领域也有很多作用,比如:医疗等,非常值得深入探索和专研。
STM32的主要优点:
(1)先进的架构,处理数据宽度为32位[7];
(2)丰富的外设,多达14到17个定时器;
(3)出色的能量节控,工作时间跟更长;
(4)浮点运算功能,计算更加精准;
(5)更大整合和调控;
(6)市场前景可观,性价比更加高。
STM32单片机平台精选:
对于集中开发共平台的角度而言,STM32单片机无疑是首选。
(1)从简单单一的定时到多个定时器和PWM功能的强化[9];
(2)从解决需求到实现需求的同时提高精度;
(3)从低成本的开发再到高层次的应用;
(4)高性能脚对脚,添加外设以及超高的兼容,将单片机的灵活性提高了不只一个层次,如果客户想要更多的需求如:提高内部储存等,在不改变核心框架的基础上,就可以完成对功能的添加。
STM32单片机核心板接口电路图及实物图如图3.1所示:
(a)原理图 (b)实物图
图3.1 STM32单片机核心板接口原理图及核心板实物图
4 软件设计
4.1系统工作流程图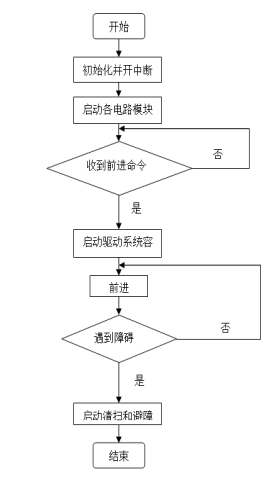
图4.1 系统工作流程图
5系统调试
5.1硬件调试
在组装好各个模块以后,我先尝试着用STM32来控制小车的正常运动,并观察地步吸尘模块是否转动,结果实验成功,证明单片机运转正常。然后尝试避障,在小车运转过程中分别用纸片遮住左前方的红外传感器和右前方红外传感器,看小车是否能够正确避障转弯,首次实验小车的转向刚好相反,通过修改源代码,能够让小车正常的躲避,达到了检验的之前我的预想的机械性能。
通过对核心主板的测试的过程里,因原理图中有一处错误连接,引起了小车的芯片的热量过高,随后修改了它的原理图之后,解决了这一错误,小车又能够正常运作。
图5.1 整机装配效果图
5.2软件调试
Keil最大也是最实用的优点就在于它能够通过编译功能在撰写完程序以后的第一时间发现其中存在的问题,在出现错误警告的同时还不会影响程序运行,所以我可以直接在编写程序的同时发现错误,及时改正,并通过仿真来预测运行结果,这样可以大大降低损坏元器件的风险。在仿真后确保程序没问题,导入芯片,打开电源,指示灯亮,按下启动键,测试运行状态及避障功能。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 14
14 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)