极致感知与定位:基于电鱼智能 RK3588 的 AMR 机器人高精度 vSLAM 导航方案
高精度定位是 AMR 机器人的核心。本文深度解析如何利用 电鱼智能 RK3588 的多核 CPU 算力进行前端特征点提取,利用独立 NPU 加速回环检测,并结合硬同步双目 MIPI 接口,构建一套集“实时定位、稠密建图、避障导航”于一体的 vSLAM 嵌入式终端,解决传统方案延迟高、功耗大、传感器融合效率低的行业痛点。
为什么 AMR 机器人首选 RK3588 进行 vSLAM?
1. 多核异构算力匹配 vSLAM 任务链
vSLAM 算法包含高度复杂的流水线,RK3588 的异构架构可以实现完美的分工:
-
Cortex-A76 高大核:负责前端视觉里程计(VO)的特征点提取(如 ORB、FAST)与匹配。
-
Cortex-A55 小核:负责后端非线性优化(BA)与路径规划节点。
-
6TOPS NPU:负责基于深度学习的语义分割避障或**回环检测(Loop Closure)**中的特征重识别,大幅提升在光照剧烈变化环境下的定位稳定性。
2. 硬同步双目 ISP 接口
vSLAM 对图像的时间戳对齐要求极高(微秒级误差即可导致定位漂移)。
-
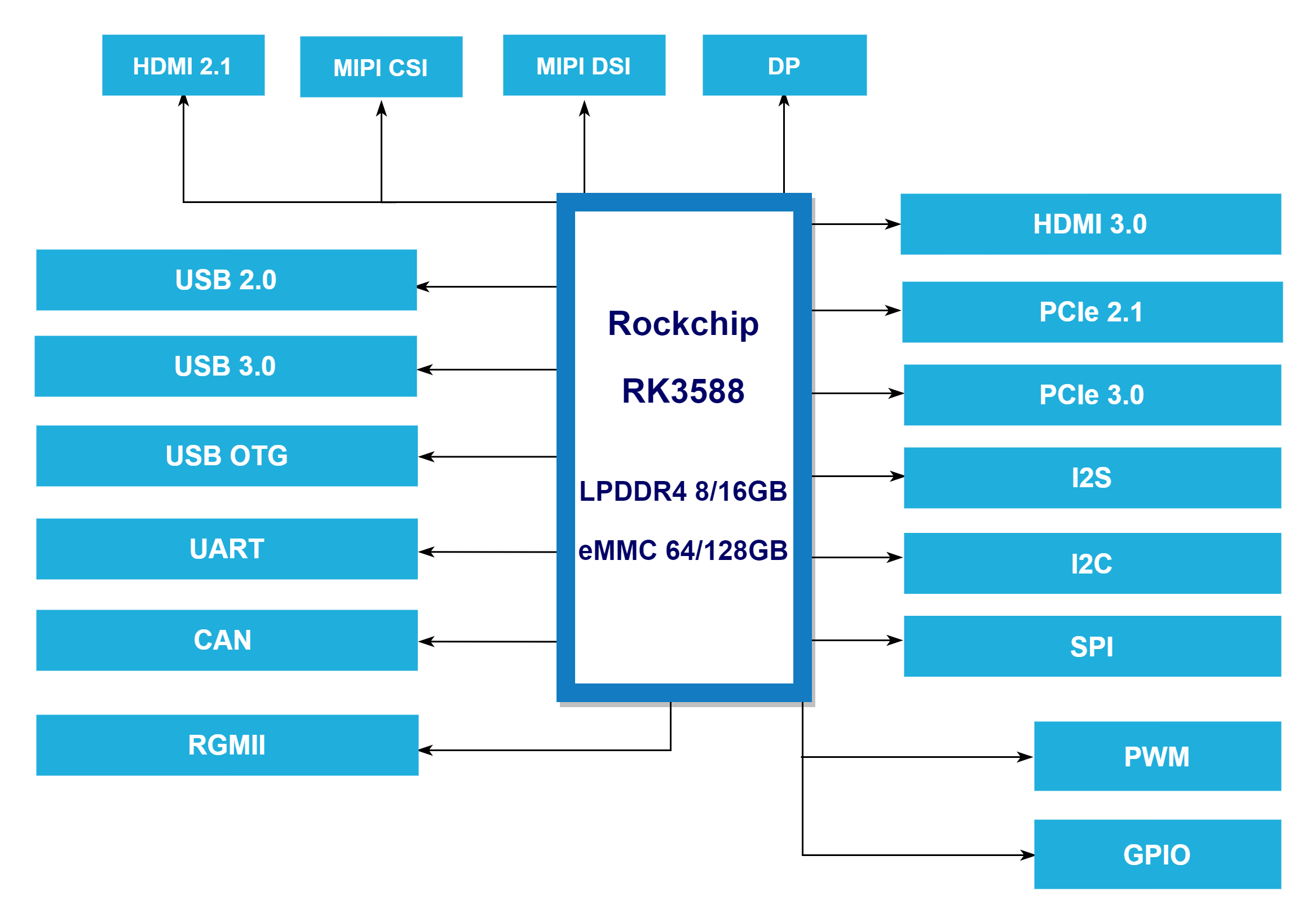
电鱼智能设计:RK3588 核心板支持多路原生 MIPI-CSI。我们通过硬件同步信号触发双目相机,确保左右眼图像完全同步。内置的 ISP 3.0 可实时完成去噪、畸变矫正与 HDR 处理,为算法提供清晰的特征图。
3. 低时延传感器融合(IMU + Vision)
RK3588 具备丰富的总线接口。通过 SPI/I2C 接口直接接入高频 IMU(如 BMI088),结合核心板的实时 Linux 系统,可实现极低延迟的视觉-惯性紧耦合(VIO),即使在机器人快速转弯或颠簸时,坐标系也不会“丢失”。
系统架构设计 (System Architecture)
该方案基于 ROS2 (Humble) 架构,实现从原始图像到坐标轨迹的全流程加速:
-
感知层:双目全局快门(Global Shutter)相机 + 六轴 IMU。
-
核心计算层(电鱼智能 RK3588):
-
VPU (视频单元):负责硬解码远端监控视频流或录制全景影像。
-
GPU (图形单元):利用 OpenCL 加速稠密地图(Point Cloud)的渲染。
-
NPU (推理单元):运行语义分割,剔除动态障碍物(如行人、移动车辆)。
-
-
执行层:通过 CAN FD/UART 接口连接底盘驱动器,下发控制指令。
关键技术实现 (Implementation)
1. 硬件加速特征提取
利用 RK3588 的 GPU 算力,通过 OpenCL 替代 CPU 进行 ORB 特征提取的加速,可以显著降低 CPU 占用率:
Bash
# 在 Ubuntu 22.04 终端确认 OpenCL 加速环境
clinfo | grep -i "Mali-G610"
2. vSLAM 核心逻辑示例 (C++ / ROS2)
在基于 ORB-SLAM3 或 VINS-Mono 的移植中,关键在于多线程的亲和力设置,确保 A76 大核处理最耗时的 VO 线程:
C++
// 逻辑示例:将视觉轨迹计算线程绑定至 RK3588 的 A76 大核
#include <pthread.h>
void bind_thread_to_big_core() {
cpu_set_t cpuset;
CPU_ZERO(&cpuset);
CPU_SET(4, &cpuset); // 核心 4-7 为 A76 大核
CPU_SET(5, &cpuset);
pthread_t current_thread = pthread_self();
pthread_setaffinity_np(current_thread, sizeof(cpu_set_t), &cpuset);
printf("VO Thread successfully bound to High-Performance Cores.\n");
}
3. 内存与存储优化
AMR 运行 vSLAM 会产生大量的关键帧与词袋模型数据。电鱼智能 RK3588 支持 LPDDR4x/5 高速内存(最大 32GB)和 NVMe SSD (PCIe 3.0),确保在大场景建图时,地图数据的加载与存储不会成为 IO 瓶颈。
性能表现 (理论预估)
基于 电鱼智能 RK3588 核心板跑测典型 vSLAM 框架(如 ORB-SLAM3):
-
图像分辨率:$1280 \times 720$ @ 30fps。
-
特征点提取延迟:单帧 < 10ms。
-
综合功耗:整板功耗约 8W - 12W(相比 x86 方案节能 70%)。
-
定位精度:在室内环境下,平移误差控制在 1% - 3% 以内。
常见问题 (FAQ)
1. RK3588 支持接入激光雷达(LiDAR)吗?
答:支持。通过双千兆网口(Eth)或 PCIe 接口,RK3588 可接入 16 线/32 线激光雷达,实现视觉与激光融合的 LVI-SAM 架构,提供更高等级的安全防护。
2. 如何解决室内动态环境(如行人走动)干扰?
答:利用电鱼智能 RK3588 的 6TOPS NPU。在 vSLAM 提取特征点前,先运行一个轻量级的动态语义分割模型,将“人”等动态像素区域设为掩码(Mask),防止错误的动态点进入定位计算。
3. 散热方案如何设计?
答:AMR 运行 vSLAM 时算力负载较高。电鱼智能建议使用定制的主动散热方案(核心板自带风扇插座支持 PWM 调速)或通过导热垫将热量传导至机器人金属底盘。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 16
16 0
0- 0



 已为社区贡献30条内容
已为社区贡献30条内容

所有评论(0)