vrep/coppeliasim+matlab,机器人轨迹控制仿真,利用matlab读取轨迹并...
本项目基于 V-REP(现称 CoppeliaSim)机器人仿真平台,结合 MATLAB 实现机械臂的轨迹规划与控制。项目包含两个主要实验:机械臂码垛任务和墙面绘图任务,展示了机器人轨迹规划的核心算法与实际应用。该项目成功展示了基于 V-REP 和 MATLAB 的机器人轨迹控制完整解决方案,通过精心设计的轨迹规划算法和运动控制策略,实现了机械臂在三维空间中的精确、平滑运动。代码结构清晰,算法可靠
vrep/coppeliasim+matlab,机器人轨迹控制仿真,利用matlab读取轨迹并控制机械臂在墙上绘图,里面有轨迹规划的相关算法。 此为学习示例,有详细的代码和说明文档
项目概述
本项目基于 V-REP(现称 CoppeliaSim)机器人仿真平台,结合 MATLAB 实现机械臂的轨迹规划与控制。项目包含两个主要实验:机械臂码垛任务和墙面绘图任务,展示了机器人轨迹规划的核心算法与实际应用。
系统架构与核心技术
1. 远程通信架构
项目采用 V-REP 的远程 API 接口实现 MATLAB 与仿真环境的实时通信:
vrep=remApi('remoteApi');
vrep.simxFinish(-1);
clientID=vrep.simxStart('127.0.0.1',19999,true,true,5000,5);通过建立 TCP/IP 连接,MATLAB 能够实时获取仿真环境中的对象句柄、位置信息,并控制机械臂的运动状态。
2. 笛卡尔空间轨迹规划
核心算法 CartesianTrajPlan 函数实现了基于齐次变换矩阵的轨迹插值:
function [eul,pos] = CartesianTrajPlan(eul0,eul1,pos0,pos1,vel)
% 构建起始和终止位姿的齐次变换矩阵
T0 = eye(4);
T0(1:3,1:3) = eul2rotm(eul0,'XYZ');
T0(1:3,4) = pos0';
T1 = eye(4);
T1(1:3,1:3) = eul2rotm(eul1,'XYZ');
T1(1:3,4) = pos1';
% 根据速度和距离计算轨迹点数
t = norm(pos0-pos1)/vel;
n = round(t/0.05);
% 使用ctraj进行轨迹插值
tc = ctraj(T0,T1,n);该算法通过计算起始位姿和终止位姿之间的连续变换,生成平滑的机械臂末端运动轨迹,确保运动过程中的连续性和稳定性。
实验一:机械臂码垛任务
任务流程
码垛任务展示了工业机器人典型的拾取-放置操作:
- 初始化连接:建立与 V-REP 仿真环境的通信
- 对象识别:获取五个待搬运立方体的对象句柄
- 顺序搬运:按照预定顺序将物体搬运到指定位置
- 姿态控制:在搬运过程中精确控制机械臂末端姿态
关键技术点
- 分层运动策略:采用"接近-抓取-抬升-移动-放置-抬升"的标准流程
- 夹爪控制:通过数字信号控制 RG2 夹爪的开合状态
- 避障规划:在关键位置设置中间点,避免碰撞
- 速度控制:根据不同运动阶段调整运动速度
运动序列示例
% 运动到目标物体上方
[endPos, endEul] = calculateApproachPose(targetPos);
[eul,pos] = CartesianTrajPlan(startEul,endEul,startPos,endPos,0.5);
% 执行抓取动作
executeGraspSequence(targetPos, gripperState);实验二:墙面绘图任务
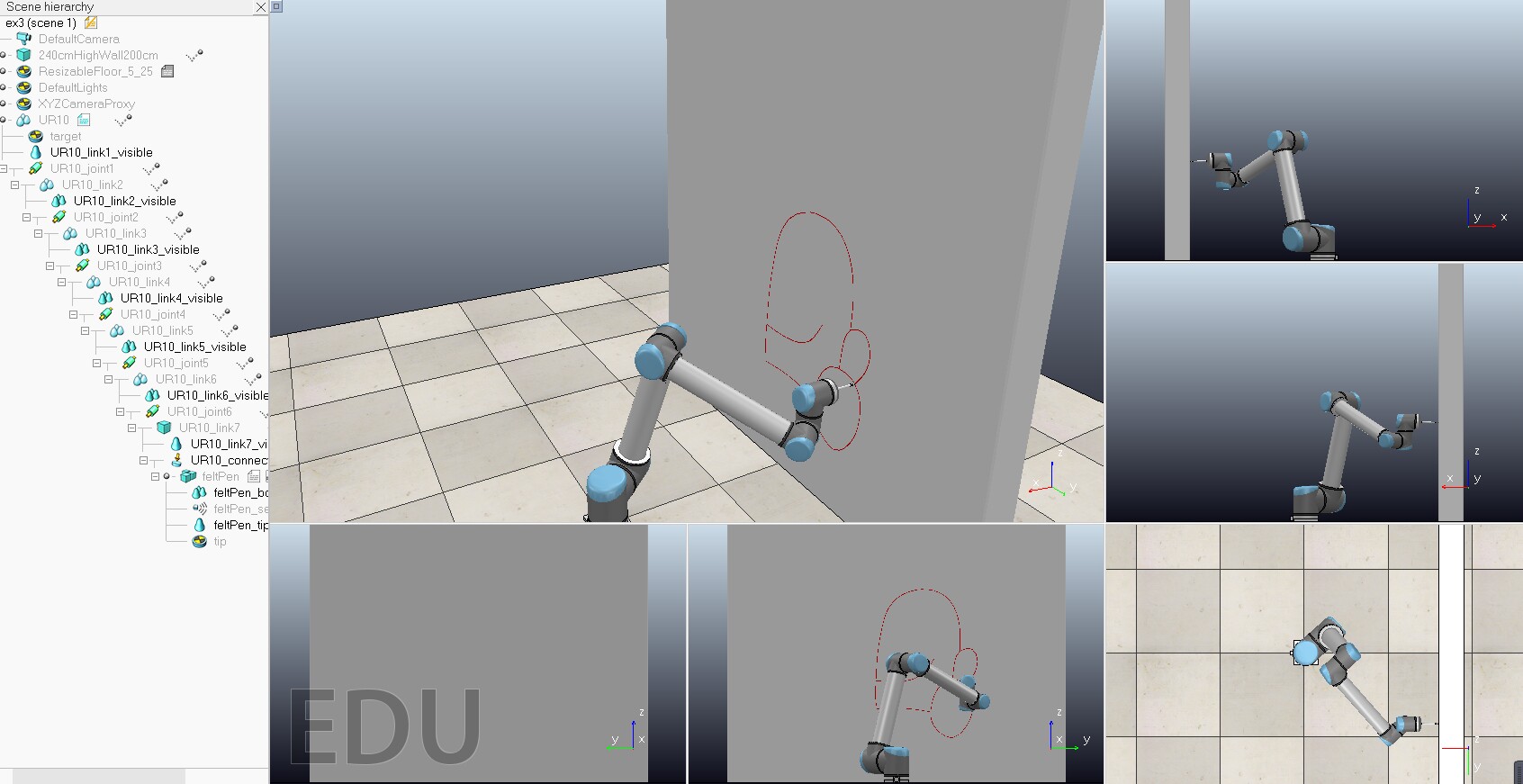
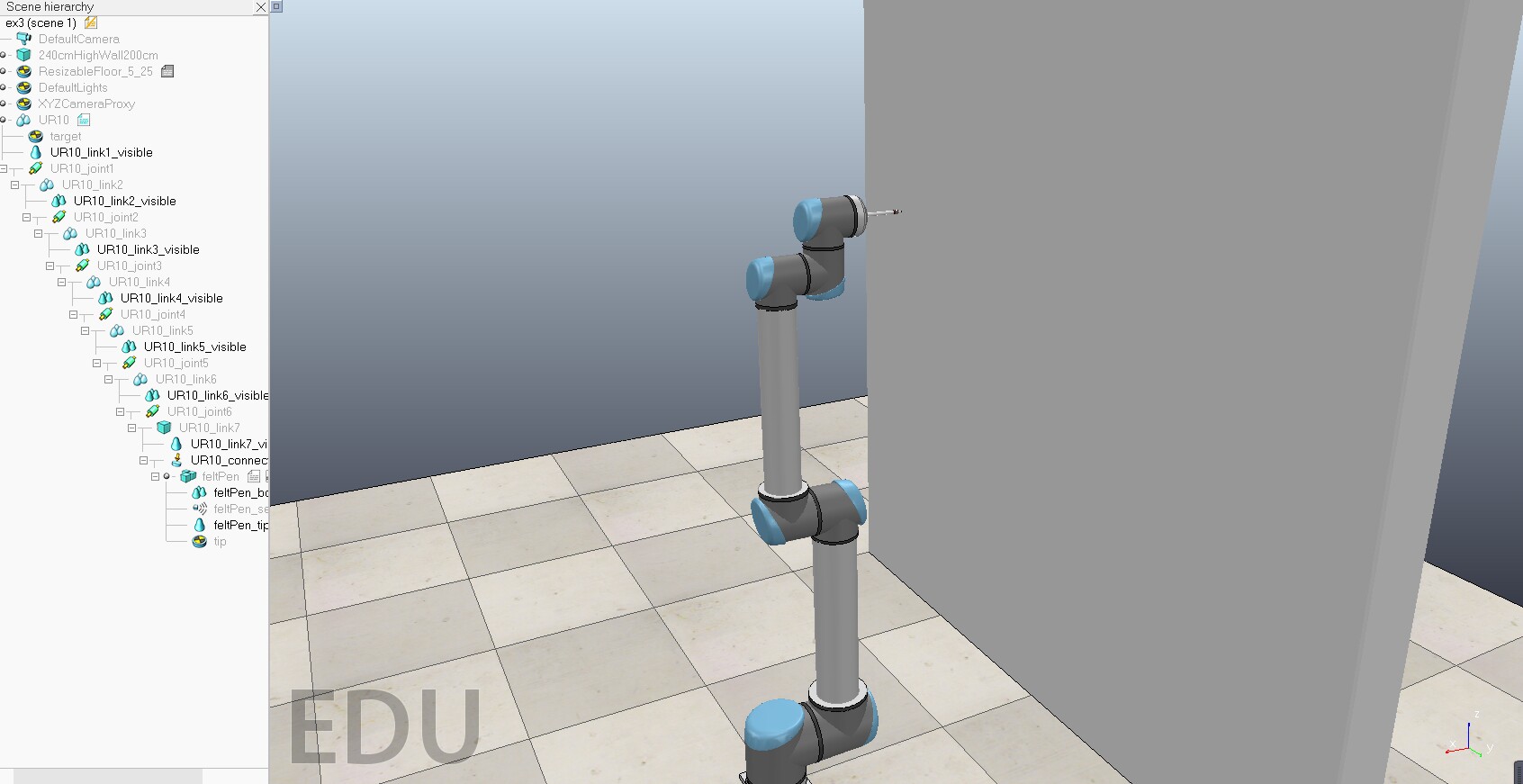
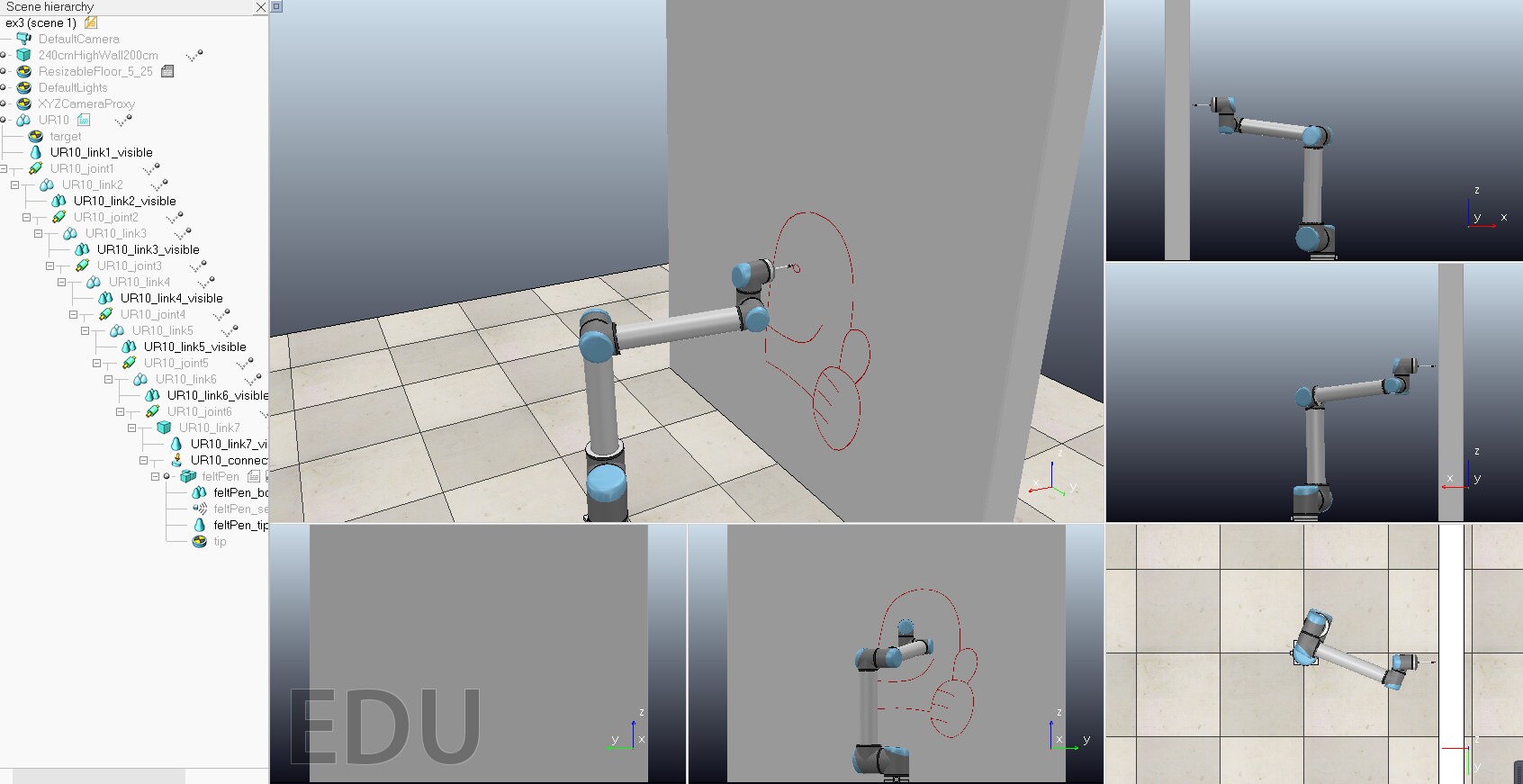
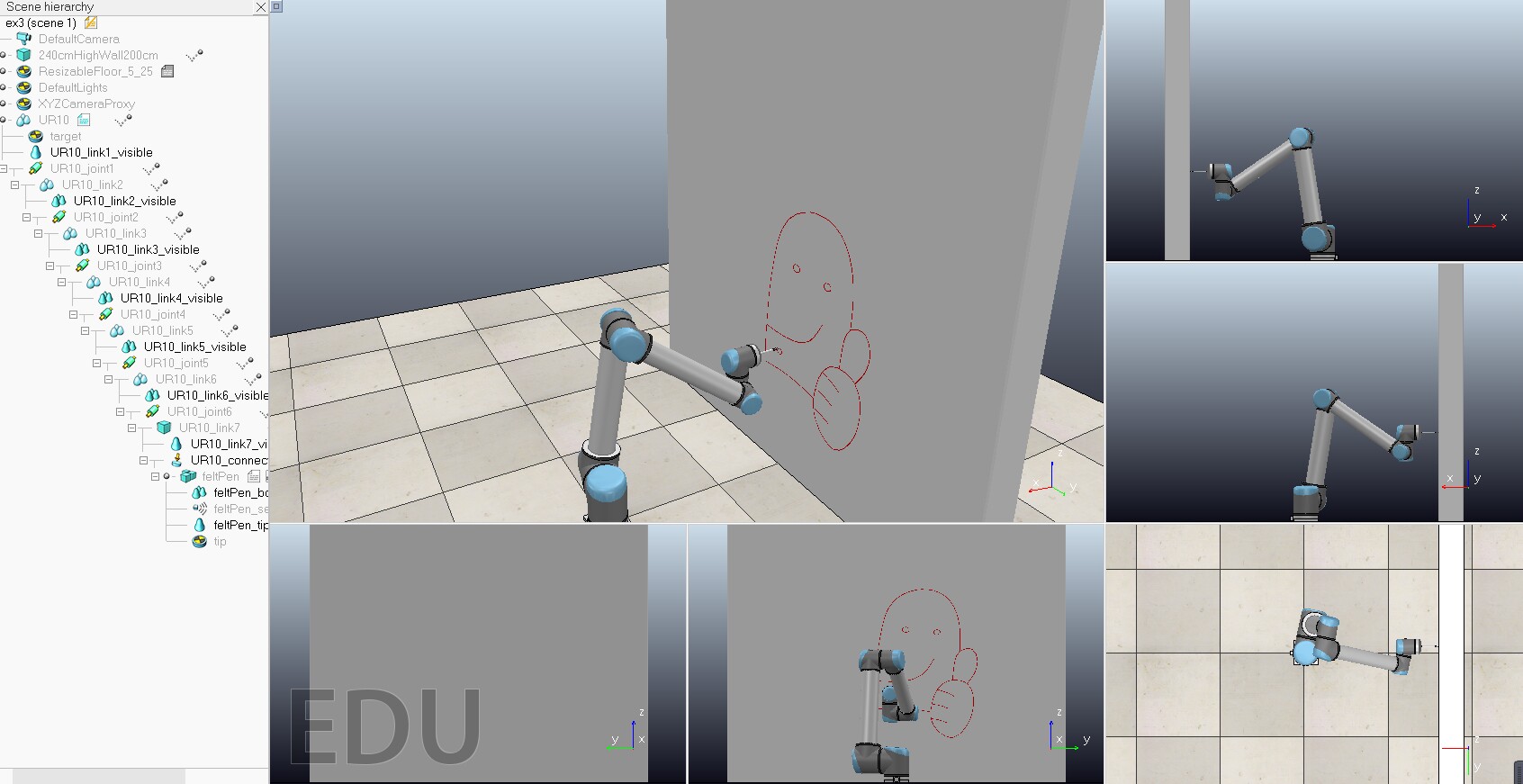
任务特点
墙面绘图任务展示了机械臂在二维平面上的精确轨迹跟踪能力:
- 路径读取:从 CSV 文件读取预定义的绘图路径
- 轨迹平滑:使用关节空间轨迹规划实现点间平滑过渡
- 连续绘制:保持与墙面的恒定距离,确保绘图质量
- 自动回位:完成绘图后自动返回初始位置
路径处理机制
function drawPath(pathFile)
path = csvread(pathFile);
% 使用关节空间轨迹规划实现路径点之间的平滑运动
for i = 1:size(path,1)-1
[s,~,~] = jtraj(path(i,:)', path(i+1,:)',10);
for j = 1:size(s,1)
% 设置机械臂末端位置
vrep.simxSetObjectPosition(clientID,target,-1,s(j,:),vrep.simx_opmode_oneshot);
pause(0.02)
end
end
end核心算法深度解析
1. 轨迹插值算法
项目采用 ctraj 函数实现基于齐次变换矩阵的轨迹插值,这种方法能够同时处理位置和姿态的平滑过渡,避免欧拉角表示的奇异性问题。
2. 运动学求解
通过直接设置机械臂末端执行器的位姿,利用 V-REP 内置的逆运动学求解器计算关节角度,简化了控制复杂度。
3. 实时控制策略
采用分段式运动控制:
- 快速移动阶段:较高速度,提升效率
- 精确定位阶段:较低速度,保证精度
- 接触操作阶段:最慢速度,确保安全
技术优势与创新点
- 模块化设计:将轨迹规划、运动控制、夹爪操作等功能模块化,提高代码复用性
- 参数化配置:运动速度、停留时间等参数可调,适应不同任务需求
- 错误处理:完善的连接状态检查和错误处理机制
- 实时可视化:在仿真环境中实时观察机械臂运动状态
应用场景扩展
本项目的技术框架可扩展到以下应用场景:
- 工业自动化:装配、焊接、喷涂等任务
- 服务机器人:物品递送、环境交互
- 科研教育:机器人学算法验证与教学演示
- 艺术创作:机器人绘画、雕塑等创造性工作
总结
该项目成功展示了基于 V-REP 和 MATLAB 的机器人轨迹控制完整解决方案,通过精心设计的轨迹规划算法和运动控制策略,实现了机械臂在三维空间中的精确、平滑运动。代码结构清晰,算法可靠,为机器人轨迹控制提供了实用的参考实现。
vrep/coppeliasim+matlab,机器人轨迹控制仿真,利用matlab读取轨迹并控制机械臂在墙上绘图,里面有轨迹规划的相关算法。 此为学习示例,有详细的代码和说明文档
项目的核心价值在于将理论算法与实际应用紧密结合,既体现了机器人运动学的理论基础,又考虑了实际工程实施中的各种约束条件,为后续的机器人应用开发奠定了坚实的技术基础。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 10
10 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)