潜水神器大分类,水下机器人如何各显神通?
潜水器的水下运动和作业,是由操作员在水面母舰上控制和监视,电缆向本体提供动力和交换信息,中继器可减少电缆对本体运动的干扰。,是将人工智能、探测识别、信息融合、智能控制、系统集成等多方面的技术集中应用于同一水下载体上,在没有人工实时控制的情况下,自主决策、控制完成复杂海洋环境中的预定任务使命的机器人。这种机器人能够用于执行搜索和营救工作,而且也能够进行水下调查和检测,能够以集群的形式进行部署,实现更
什么是水下机器人,水下机器人长什么样,水下机器人的用途是什么……对于许多普通大众来说,水下机器人似乎还很陌生,其实它早已将人类的足迹延伸至万米的大洋深处。
一、水下连接器的分类
广义上水下机器人也可以称作潜水器(Underwater Vehicles),是一种可以在水下代替人在充满未知和挑战的海洋环境中完成某种任务的装备。
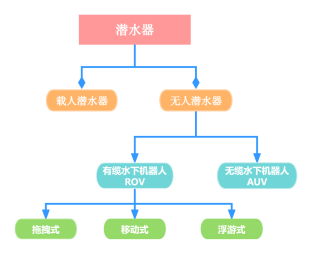
1、从种类上看,根据是否载人可以将潜水器分为载人潜水器和无人潜水器。
载人潜水器由人工输入信号操控各种动作,由潜水员和科学家通过观察窗直接观察外部环境。 其优点是便于处理各种复杂问题,但是人生命安全的危险性增大。狭义上的水下机器人是指无人潜水器。无人潜水器按照与水面支持系统间联系方式的不同可以分为有缆遥控水下机器人(remotely operated vehicle,简称 ROV)、无缆水下机器人 (autonomous underwater vehicle,简称 AUV))两种。
有缆水下机器人
有缆水下机器人都是遥控式的,根据运动方式不同可分为拖曳式、移动式和浮游式三种。
有缆水下机器人(ROV)需要由电缆从母船接受动力,并且 ROV 不是完全自主的,它需要人为的干预。主要由水面设备(包括操纵控制台、电缆绞车、吊 放设备 、供电系统等)和水下设备(包括中继器和潜水器本体)组成。潜水器本体在水下靠推进器运动,本体上装有观测设备(摄像机、照相机、照明灯等)和作业设备(机械手、切割器、清洗器等)。潜水器的水下运动和作业,是由操作员在水面母舰上控制和监视,电缆向本体提供动力和交换信息,中继器可减少电缆对本体运动的干扰。由于人们通过电缆对ROV进行遥控操作,电缆对ROV像“脐带”对于胎儿一样至关重要,但是由于细长的电缆悬在海中成为 ROV最脆弱的部分,大大限制了机器人的活动范围和工作效率。
无缆水下机器人
无缆水下机器人一般是自治式机器人,它能够依靠本身的自主决策和控制能力高效率地完成预定任务,在一定程度上代表了目前水下机器人的发展趋势。
无缆水下机器人(AUV)又称智能水下机器人,是将人工智能、探测识别、信息融合、智能控制、系统集成等多方面的技术集中应用于同一水下载体上,在没有人工实时控制的情况下,自主决策、控制完成复杂海洋环境中的预定任务使命的机器人。它能对观测信息进行加工,建立环境和内部状态模型。操作人员通过人机交互系统以面向过程的抽象符号或语言下达命令,并接受经计算机加工处理的信息,对潜水器的运行和动作过程进行监视并排除故障。操作人员仅下达总任务,机器人就能根据识别和分析环境,自动规划行动、回避障碍、自主地完成指定任务。
2、从应用场景来看,水下机器人可以分为消费类水下机器人或产业型水下机器人。
消费型机器人主要满足消费者在水中进行摄影、牌照、探险等娱乐性需求,类似于消费类无人机,如大疆无人机,满足的是用户航拍的需求。
产业型水下无人机主要应用于商业领域,主要服务于军事、海洋环境探测、海洋救援、海洋渔业、城市船舶河道等领域。
- 从外形来看,水下机器人有人形机器人、蛇形机器人、鱼型机器人、和蝠鲼型机器人、
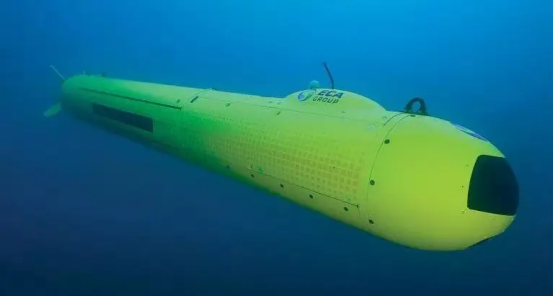
标准流线型水下机器人
流线型的艇身是对水下动物的仿生,使得无人机可以在水中快速前进、完成几十甚至上百海里的长距离移动。这类无人机已经存在多年,安装相机、传感器和采样装置,可以用于科考任务。但是这一型的无人机的问题,在于它们无法和水下世界主动发生交互。
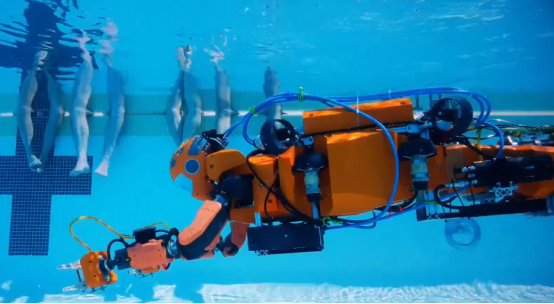
水下人形机器人
斯坦福大学的机器人团队研发出名为OceanOneK的水下人机交互机器人,采用拟人化设计配备双臂结构,通过触觉反馈系统使操作人员在水面远程控制机械手完成精细作业,视觉反馈功能可实时传递水下环境影像。作为特种机器人领域的技术突破,主要用于深海考古、危险水域探查等任务 。
水下蛇形机器人
挪威研发了一款水下蛇形机器人Eelume,用于对水下设备进行检查、维修,如海底管道和石油钻井平台等等。这种蛇形机器人采用仿生设计,细长灵活的结构特点,可以在大型设备无法到达的区域进行工作,还可以还可以永久性地部署在水下已有或新建的作业区域,从而降低作业成本的典范,该技术可显著减少大型、昂贵作业船的使用。

水下鱼形机器人
鱼形机器人,通过交替向鱼尾两侧注入机油实现摆尾,驱动鱼前进,还可改变两侧注油比例实现机器鱼转向和调头,该机器鱼利用水平舵和活塞位移浮力控制系统保持稳定,其浮力控制单元是一个圆柱体结构,通过压缩和解压空气来实时调整机器鱼的密度,从而改变浮力来保持在所需要的水深。鱼形机器人与普通鱼类高度相似的外形和功能,可以更轻松地研究鱼类集群运动,监测目前日益严峻的海洋环境。

水下蝠鲼型机器人
“蝠鲼机器人”,又称“魔鬼鱼”。仿蝠鲼机器人模仿自然界中蝠鲼的流线型身体和波浪式游动方式,这种设计让它在水下行动时既灵活又高效。它的身体通常由柔软材料制成,能够像真正的蝠鲼一样优雅地滑行,减少水流的阻力。这种机器人能够用于执行搜索和营救工作,而且也能够进行水下调查和检测,能够以集群的形式进行部署,实现更快、更高效的搜寻和调查。

二、结语
为适配水下机器人持续发展需求、助力突破水下潜航体设计局限并降低整体成本,中连讯科水密连接器核心技术优势成为关键支撑部件。 产品具备IP68及以上高防水等级,可耐受深海60MPa以上高压环境,采用特种耐腐材料与双层密封结构,经严苛盐水浸泡测试仍保持稳定性能,保障水下电力传输与信号通信的高可靠性;覆盖多规格型号,支持不同通流能力,实现与标准化水下电缆、电子控制模块、ROV 推进器及多功能水下机器手的无缝适配,同时可按需提供定制化解决方案。中连讯科水密连接器打破进口依赖,大幅降低采购与维护成本,为水下机器人行业的技术升级与成本优化提供硬核支撑。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 16
16 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)