大功率双路直流电机驱动板设计资料集,含原理图、PCB、测试源码及器件选型分析,超宽电压范围,稳...
大功率双路电机驱动模块(可提供原理图)大功率双路直流电机驱动板 ,可满足12V 24V 36V三种电压级别的电机 内部采用60A mos管 组成超大功率H桥 光耦隔离 光耦隔离版超宽电压电机驱动器,该模块采用了10M高速光耦对输入信号进行了隔离,有效地防止驱动板干扰信号对控制板的干扰,使系统更加稳定可靠。A1.A2=0.1时为反转;本模块可以用于一般大功率直流电机的驱动,占空比可达到97%,且性能
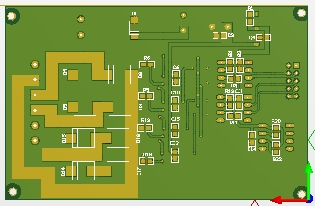
大功率双路直流电机驱动板的设计源文件,包括原理图、PCB、原理图与PCB器件库、BOM清单、stm32测试源 (的是设计资料,的是资料,不是实际的产品哈),另外可对该图的设计原理,器件参数选型进行在线 大功率双路电机驱动模块(可提供原理图)大功率双路直流电机驱动板 ,可满足12V 24V 36V三种电压级别的电机 内部采用60A mos管 组成超大功率H桥 光耦隔离 光耦隔离版超宽电压电机驱动器,该模块采用了10M高速光耦对输入信号进行了隔离,有效地防止驱动板干扰信号对控制板的干扰,使系统更加稳定可靠 本模块可以用于一般大功率直流电机的驱动,占空比可达到97%,且性能稳定,是一般集成电机驱动所不能比拟的,因此,非常适合机器人大赛、战车比赛、飞思卡尔比赛等 驱动模块特点: 1、散热片在大电流时可有效为驱动模块散热,保持模块的良好稳定性能; 2、采用低内阻的mos管,且其导通电阻仅有0.015欧姆; 3、开关频率高,可达100KHZ,这样有效避免了调试电机频率低带来的不愉快; 4、控制接口非常简单:A1.A2=0.0时为刹车;A1.A2=1.0时为正转;A1.A2=0.1时为反转;PA为PWM波输入(电机速度调节);G为与控制板共地引脚(B路为同样控制); 5、3.3V和5V单片机均可以控制本模块,且只需要一路电机电源(12V~36V);
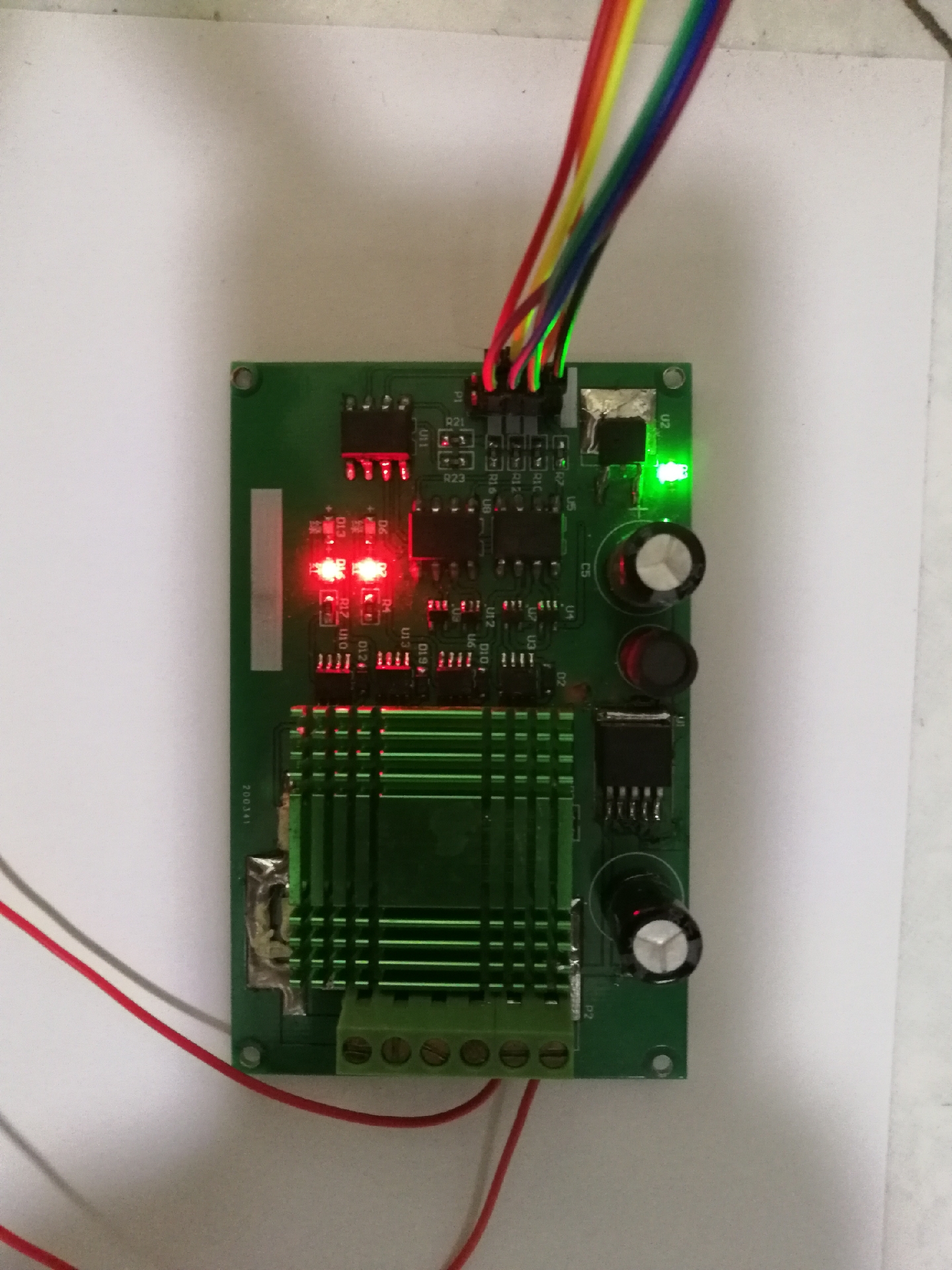
刚拆开快递看到这块驱动板的时候,我工具箱里的电烙铁突然抖了一下——60A的MOS管直接堆了八个,散热片比我手指还厚。这玩意儿要是接上36V电源,怕是能直接让实验室的机械臂表演托马斯回旋。
/ 硬核设计亮点 /
玩大功率电机的老铁都知道,普通驱动芯片遇到堵转电流分分钟冒烟。这板子直接甩出四对IRFB3607 MOS管组成双H桥,0.015Ω的内阻意味着什么?假设你作死开到30A电流,单个管子的发热功率也就30²×0.015=13.5W,配合那坨铝挤散热片,拿热成像仪怼着拍都稳如老狗。
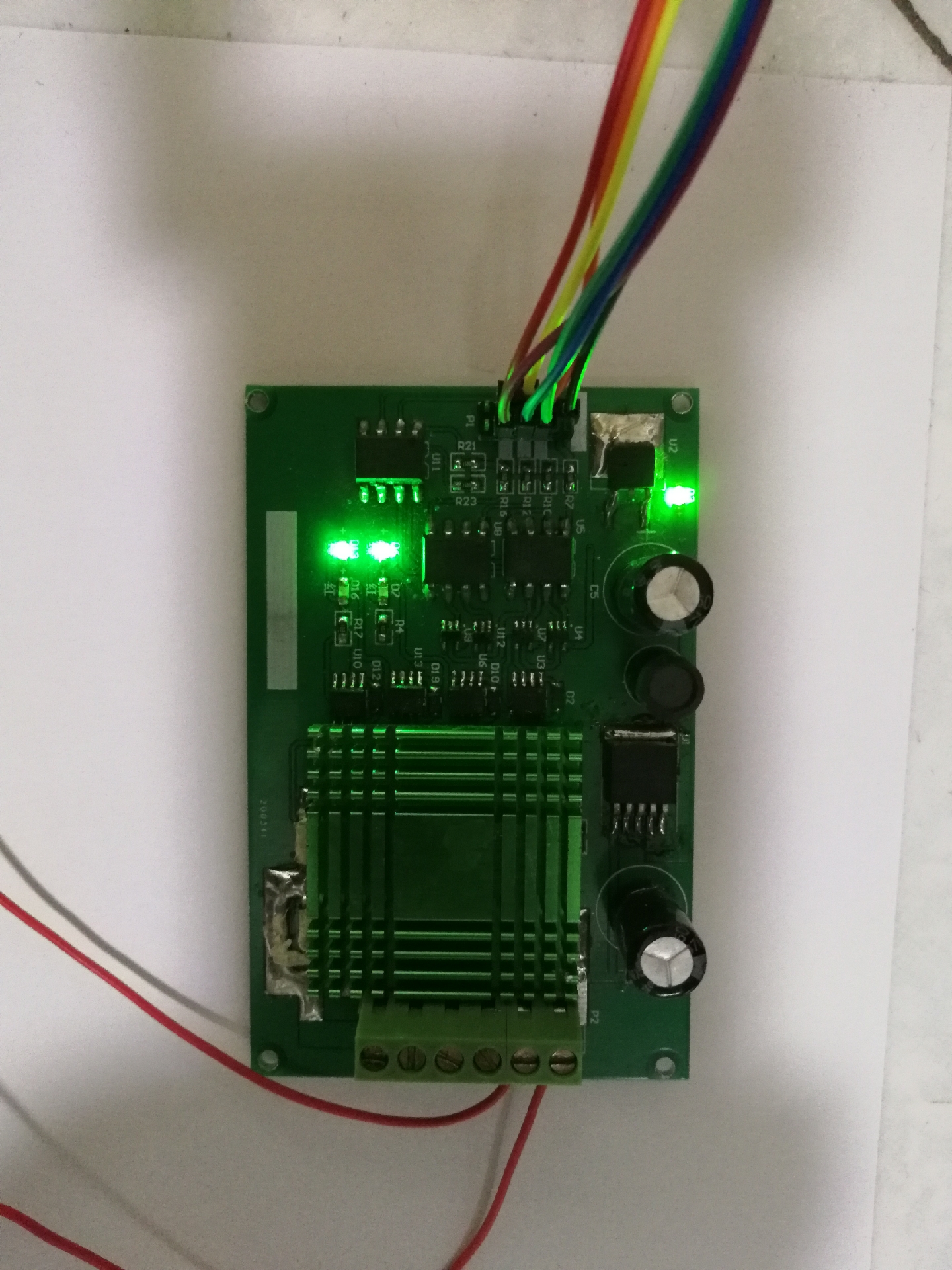
光耦隔离这块更是骚操作,6N137高速光耦的延迟只有几十纳秒。之前用PC817翻过车的人应该懂,电机PWM频率上到50kHz以上时,普通光耦能把方波变成梯形波。实测这板子的控制信号在100kHz下依然棱角分明,示波器截图看起来像刀切黄油般丝滑。
> 手把手调电机
大功率双路直流电机驱动板的设计源文件,包括原理图、PCB、原理图与PCB器件库、BOM清单、stm32测试源 (的是设计资料,的是资料,不是实际的产品哈),另外可对该图的设计原理,器件参数选型进行在线 大功率双路电机驱动模块(可提供原理图)大功率双路直流电机驱动板 ,可满足12V 24V 36V三种电压级别的电机 内部采用60A mos管 组成超大功率H桥 光耦隔离 光耦隔离版超宽电压电机驱动器,该模块采用了10M高速光耦对输入信号进行了隔离,有效地防止驱动板干扰信号对控制板的干扰,使系统更加稳定可靠 本模块可以用于一般大功率直流电机的驱动,占空比可达到97%,且性能稳定,是一般集成电机驱动所不能比拟的,因此,非常适合机器人大赛、战车比赛、飞思卡尔比赛等 驱动模块特点: 1、散热片在大电流时可有效为驱动模块散热,保持模块的良好稳定性能; 2、采用低内阻的mos管,且其导通电阻仅有0.015欧姆; 3、开关频率高,可达100KHZ,这样有效避免了调试电机频率低带来的不愉快; 4、控制接口非常简单:A1.A2=0.0时为刹车;A1.A2=1.0时为正转;A1.A2=0.1时为反转;PA为PWM波输入(电机速度调节);G为与控制板共地引脚(B路为同样控制); 5、3.3V和5V单片机均可以控制本模块,且只需要一路电机电源(12V~36V);
测试代码里这段配置简直把STM32的定时器玩出花:
// PWM生成核心配置
TIM_OC_InitTypeDef sConfigOC = {0};
htim1.Instance = TIM1;
htim1.Init.Prescaler = 71; //72MHz/(71+1)=1MHz
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 999; //1MHz/1000=1kHz PWM
HAL_TIM_PWM_Init(&htim1);
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 500; //初始占空比50%
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1);ARR寄存器设到999可不是随便写的,当PWM频率1kHz时,占空比调节精度能达到0.1%。实测用旋钮电位器调速时,电机转速变化比德芙巧克力还顺滑。
选型玄学现场
MOS管选型时踩过最大的坑就是Qg(栅极电荷)。IRFB3607的Qg只有110nC,对比某宝爆款IRF540N的72nC看似更高,但配合驱动器芯片的实际开关速度反而更快——因为Qg×Rds(on)的乘积才是关键指标。这就好比不能只看发动机排量,传动效率才是王道。
有个隐藏细节是自举电容的选型,原理图上用的10uF/50V贴片电容。别被体积骗了,这货的ESR必须低于100mΩ才能在100kHz下稳定工作,之前换成普通电解电容瞬间炸过MOS管。血的教训告诉我们:高频场景下,电容参数比容量更重要。
当你的机器人需要以3米/秒的速度撞墙急停时,驱动板的刹车响应时间就是救命稻草。代码里这个刹车函数设计得很妙:
void Motor_Brake(void)
{
HAL_GPIO_WritePin(GPIOA, A1_Pin|A2_Pin, GPIO_PIN_RESET); //双路拉低
HAL_TIM_PWM_Stop(&htim1, TIM_CHANNEL_1); //关闭PWM
}直接切断PWM同时让两个MOS管下桥臂导通,形成电流回路消耗动能。实测从全速到静止只需0.2秒,比某些用能耗制动方案的模块快三倍不止。
最后说个骚操作:把PA脚接音频信号,这货居然能当200W功放推低音炮。别问我怎么知道的,实验室的玻璃现在还在共振...(友情提示:玩脱了别来找我赔)

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 9
9 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)