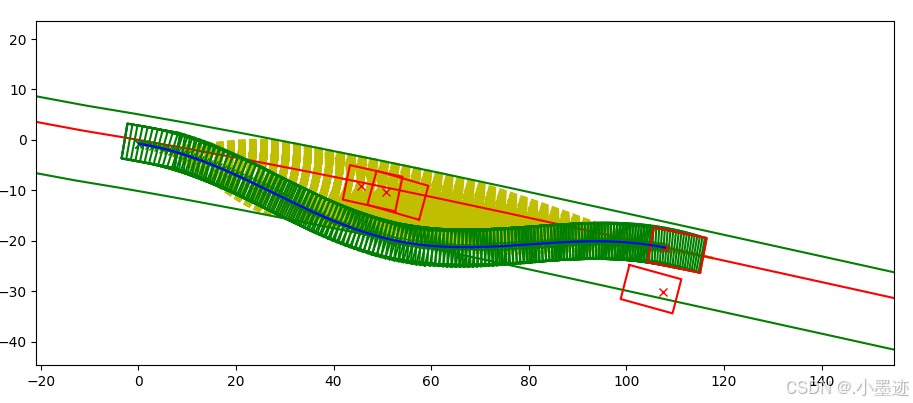
在局部轨迹规划中,加速度和加加速度代价对轨迹的影响
加加速度代价(Jerk Cost)**的引入会显著影响路径的平滑性、舒适性和可行性,尤其在自动驾驶、机器人导航等动态系统中。在局部路径规划中,**加速度代价(Acceleration Cost)通过合理设计这两种代价,可以在动态环境中生成既平滑又响应灵敏的轨迹。速度曲线的高阶导数更平滑,接近人类驾驶的“自然”行为。
·
在局部路径规划中,**加速度代价(Acceleration Cost)和加加速度代价(Jerk Cost)**的引入会显著影响路径的平滑性、舒适性和可行性,尤其在自动驾驶、机器人导航等动态系统中。以下是它们的核心影响与效果分析:
1. 加速度代价(Acceleration Cost)
影响
- 运动平滑性:
限制加速度可避免速度突变,减少机械冲击(如急加速/急刹车),提升乘坐舒适性。 - 动力学可行性:
确保生成的路径符合载体的物理限制(如电机扭矩、轮胎摩擦力)。 - 能耗优化:
高加速度通常伴随高能耗,优化加速度可延长电池寿命(如电动汽车)。
效果
- 路径表现:
规划出的路径速度变化更平缓,速度曲线呈“梯形”或“S形”(而非阶跃式)。 - 数学形式:
代价函数中通常用加速度的平方积分:
[
C_{acc} = \int_{t_0}^{t_f} a(t)^2 , dt
]
典型场景
- 自动驾驶车辆变道时,限制横向加速度(通常 ≤ 2 m/s²)以避免侧滑。
- 机械臂抓取物体时,限制末端执行器的加速度防止振动。
2. 加加速度代价(Jerk Cost)
影响
- 舒适性:
加加速度(Jerk,加速度的变化率)直接影响运动的“柔顺性”。高Jerk会导致颠簸感(如电梯启动时的顿挫)。 - 机械寿命:
高频Jerk会加速机械部件磨损(如机器人关节的谐波减速器)。 - 运动精度:
抑制Jerk可减少跟踪误差(如CNC机床加工曲线时的震颤)。
效果
-
路径表现:
速度曲线的高阶导数更平滑,接近人类驾驶的“自然”行为。 -
数学形式:
代价函数中惩罚Jerk的平方积分:
[
C_{jerk} = \int_{t_0}^{t_f} j(t)^2 , dt
]
典型场景
- 自动驾驶中,优化Jerk可使加减速过程更柔和(如特斯拉的“舒适模式”)。
- 无人机轨迹规划中,减少Jerk避免摄像头拍摄画面抖动。
3. 联合优化效果
当同时考虑加速度和加加速度时:
- 轨迹特性:
生成符合 最小加加速度(Minimum Jerk) 或 最小加速度(Minimum Snap) 的轨迹,表现为高阶多项式曲线(如五次多项式)。 - 计算复杂度:
需要求解更高阶的最优控制问题(如QP优化),可能增加实时规划的计算负担。 - 权衡取舍:
- 低加速度 + 低Jerk → 超平滑但响应慢。
- 允许适度Jerk → 响应更快,但舒适性略降。
4. 实际应用对比
| 优化目标 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|
| 仅加速度代价 | 计算简单,满足基本动力学 | 运动可能不够平滑 | 工业机器人低速作业 |
| 仅加加速度代价 | 极致平滑,舒适性高 | 可能响应延迟 | 载人自动驾驶 |
| 二者联合优化 | 平衡平滑性与响应性 | 计算复杂 | 高速无人机/服务机器人 |
5. 代码示例(代价函数设计)
Python示例(二次规划)
import numpy as np
from scipy.optimize import minimize
def cost_function(u):
""" u = [加速度序列, 加加速度序列] """
acc_cost = np.sum(u[0]**2)# 加速度代价
jerk_cost = np.sum(np.diff(u[0])**2) # 加加速度代价(加速度差分)
return 0.5 * acc_cost + 0.5 * jerk_cost# 加权和
# 优化求解
result = minimize(cost_function, x0=np.zeros(10), method='SLSQP')
C++(ROS导航栈参考)
// 局部规划器中的代价计算
double TrajectoryEvaluator::computeCost(const Trajectory& traj) {
double acc_cost = 0, jerk_cost = 0;
for (const auto& point : traj.points) {
acc_cost += point.acceleration.squaredNorm();
jerk_cost += point.jerk.squaredNorm();
}
return w_acc * acc_cost + w_jerk * jerk_cost; // 加权求和
}
6. 工程建议
- 动态权重调整:
根据场景调整代价权重(如高速道路降低Jerk权重,停车场增加加速度权重)。 - 物理约束:
硬约束优先于软代价(如|acc| ≤ 3 m/s²作为约束条件)。 - 实时性优化:
对Jerk优化可预计算参考轨迹,在线仅做微调。
通过合理设计这两种代价,可以在动态环境中生成既平滑又响应灵敏的轨迹。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 8
8 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)