犀牛派X1(机器人开发板)连接激光雷达实操演示
犀牛派X1是阿加犀的一款基于高通跃龙QCS8550平台研发的智能边缘计算开发板,采用6核高性能处理器,大核主频高达3.2GHz。集成高性能图形引擎 和综合算力达48TOPS的AI引擎,支持Wi-Fi 7 (2.4G/5G/6GHz),BT5.3/BLE,GNSS等无线通信技术。项目参数平台AI性能OSCPUGPUAdreno 740运行内存存储128GB视频编解码CameraHDMI。
(接入激光雷达实物图)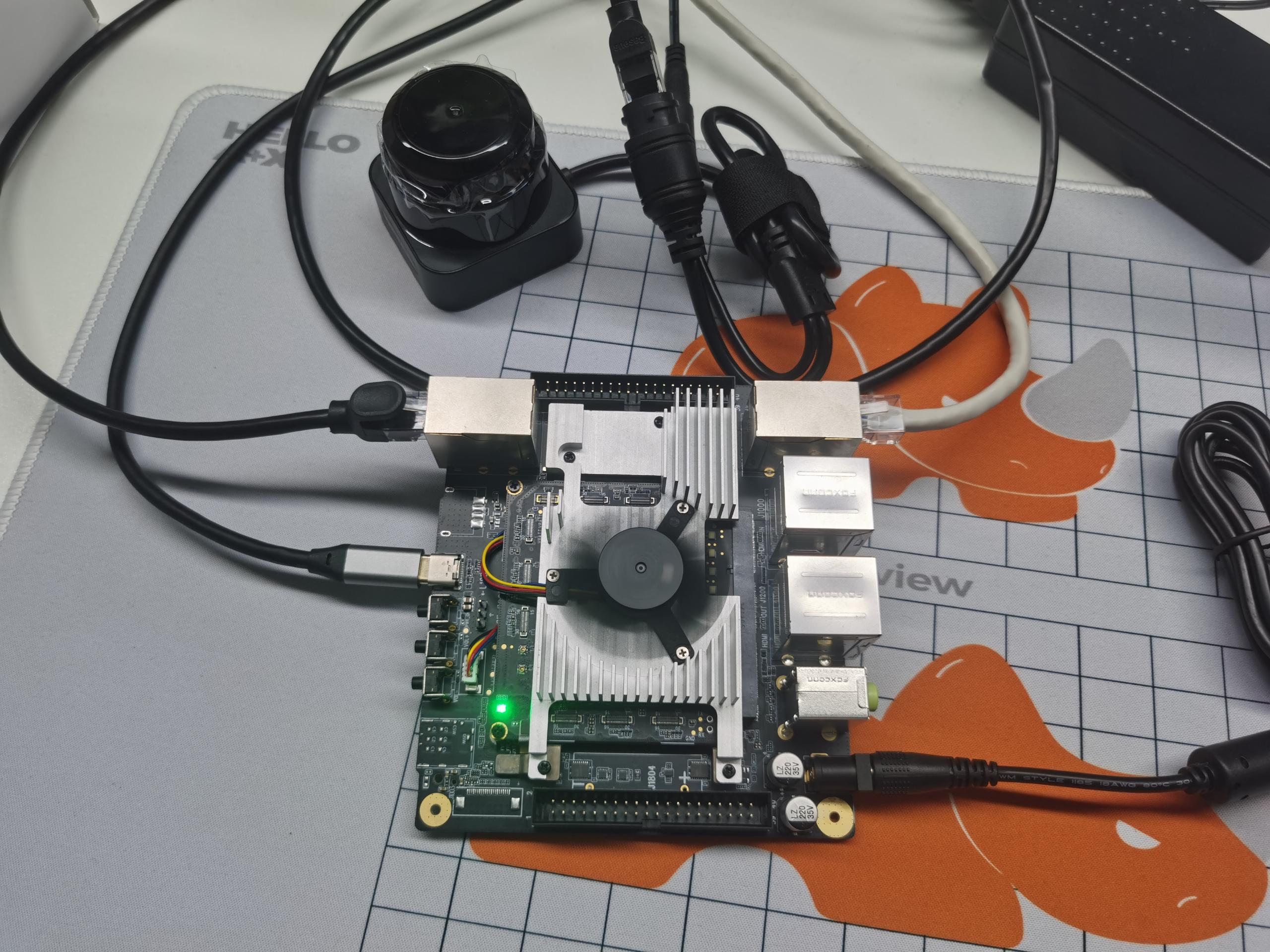
设备介绍
犀牛派X1是阿加犀的一款基于高通跃龙QCS8550平台研发的智能边缘计算开发板,采用6核高性能处理器,大核主频高达3.2GHz。集成高性能图形引擎 和综合算力达48TOPS的AI引擎,支持Wi-Fi 7 (2.4G/5G/6GHz),BT5.3/BLE,GNSS等无线通信技术。犀牛派X1开发板拥有丰富的工业接口, 包括USB3.0/USB2.0/USB-C/HDMI/Audio/RJ45等,可广泛应用于工业控制,智能制造,安防监控,智能机器人,数字多媒体等领域,其详细硬件参数信息如下:
| 项目 | 参数 |
|---|---|
| 平台 | Qualcomm® QCS8550 |
| AI性能 | ~48 TOPS INT8 |
| OS | AidLux(Android13 + Ubuntu22.04) / Ubuntu22.04 |
| CPU | 1x Kryo Prime 3.2 GHz + 2x Kryo Gold 2.8 GHz + 3x Kryo Silver 2.0 GHz |
| GPU | Adreno 740 |
| 运行内存 | 16GB LPDDR5X |
| 存储 | 128GB |
| 视频编解码 | Decode: 4K@240fps or 8K@60fps H.264/H.265 /Encode: 4K@120fps or 8K@30fps H.264/H.265 |
| Camera | x8, CSI interface reserved |
| HDMI | HDMI OUT X1, HDMI IN x1, 支持HDMI1.4,支持1080P@60Hz, 支持4K@30Hz |
| 无线连接 | Wi-Fi7:802.11be, 2.4G/5G/6G HZ DBS, 2*2 MIMO BT:5.3 |
| USB | USB-A 3.0:x4, USB3.0 Type-C:x1, 支持DP1.4 |
| 音频 | Line in, 3.5mm Interface; Line out, 3.5mm Interface |
| 网络接口 | LAN * 3,WAN * 1 |
| RTC | x1, CR2032(225mAh) |
| 电源 | DC12V 5A |
| 工作温度 | -20℃ ~ +60℃ |
| 外形尺寸 | 125x110x35.5mm |
| 其他接口 | RS232: x2,RS485: x2,40PIN连接器,MIPI—DSI |
激光雷达采用了 Laser LDS - 50C - E,可 360° 全方位扫描,适配多种移动机器人等场景,其详细硬件参数及接线相关信息如下:
| 参数类别 | 具体信息 |
|---|---|
| 核心光学参数 | 激光波长为 905nm±15nm,采用单脉冲回波模式,回波强度范围 0 - 254,抗强光能力超过 80000LX,能适应复杂光照环境 |
| 测距相关参数 | 有效测距距离 0.1 - 40m(90% 反射率场景)、0.1 - 15m(10% 反射率场景);测距精度稳定在 ±25mm,激光频率达 30kHz |
| 电气物理参数 | 工作电压范围 9VDC - 28VDC,功耗≤2.5W;设备尺寸为 55.5mm×55.5mm×51.7mm,参考重量<108g,防护等级达 IP5X/IP54 |
| 数据传输参数 | 数据接口为以太网,可实现 100Mbit/s 的数据传输,适配工业场景中对数据传输速率的需求 |
| 扫描能力 | 水平视场角为 360°,水平角分辨率在 10HZ 刷新频率下为 0.12°,15HZ 刷新频率下为 0.18°;刷新频率支持 10HZ 和 15HZ 两档可调,搭配内置直流无刷电机 |
一、Laser Lidar硬件连接和网络配置
激光雷达接入12V电源,其数据接口为以太网,接入犀牛派X1的RJ45(LAN口),犀牛派X1接口如图: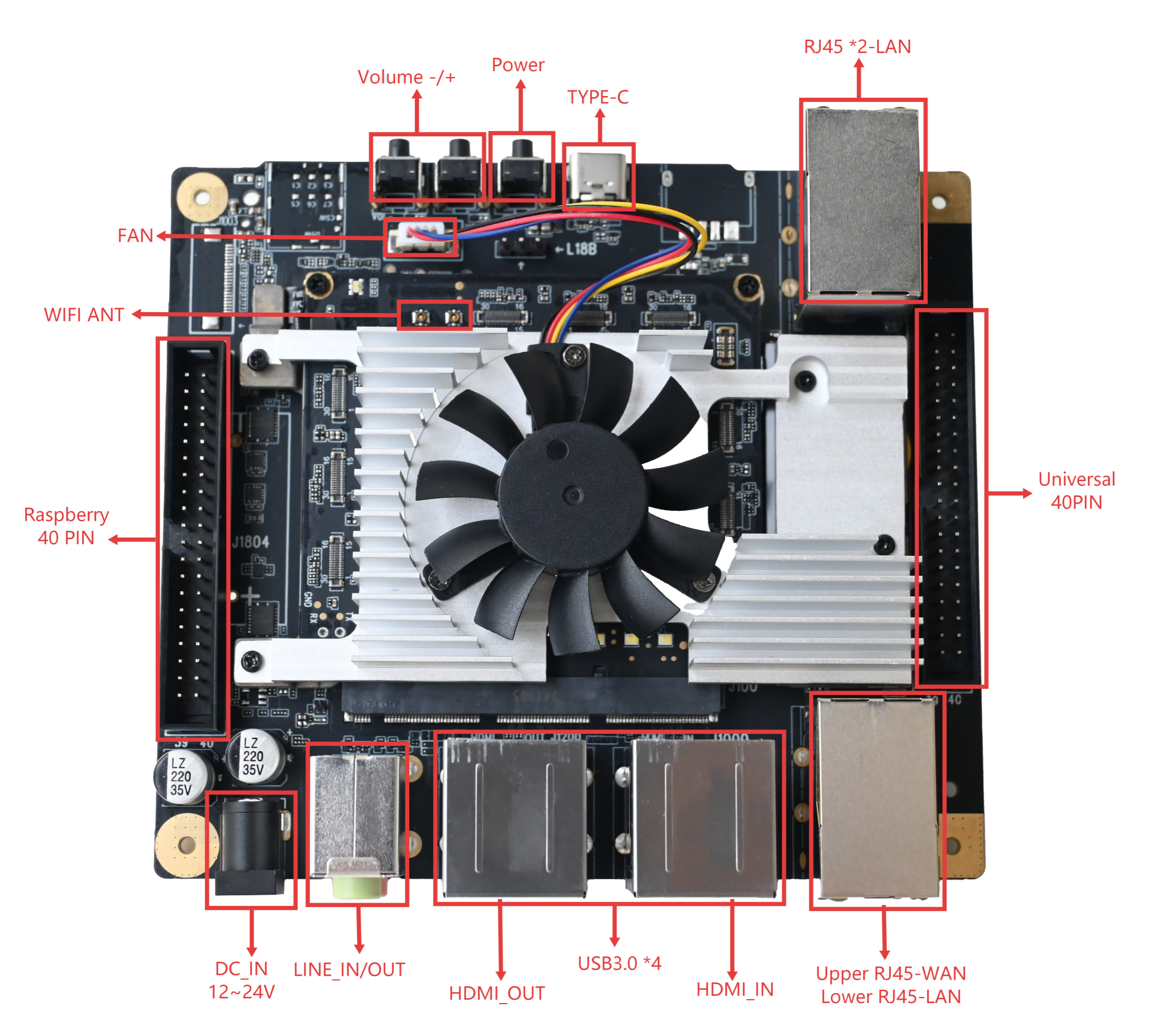
电源侧在下方时,上方的两个RJ45网口均是LAN口(下方两口为WAN、LAN),激光雷达用一根网线接入犀牛派X1任意LAN口。
雷达的出厂设置如下:
➢雷达 IP:192.168.158.98
➢ 雷达子网掩码:255.255.255.0
➢ 雷达网关:192.168.158.1
➢ 雷达默认上传地址:192.168.158.15
为了保证雷达能够和PI正常通讯,需要保证二者在同一个网段。
对犀牛派X1进行网络设置:
犀牛派X1 Linux版:
开发板用type-c数据线连上电脑并且电脑上已经安装了相应工具后(安装可见技术文档 https://docs.aidlux.com/guide/hardware/products-introduction/install-tools )打开终端,可使用adb服务,adb root后adb shell登录,然后进行网络配置:
cd /etc/
./lan_wan_config.sh set 1 192.168.158.15
犀牛派X1融合系统版:
开发板用type-c数据线连上电脑并且电脑上已经安装了相应工具后(安装可见技术文档 https://docs.aidlux.com/guide/hardware/products-introduction/install-tools )打开终端,可使用adb服务,adb root后adb shell登录,然后进行网络配置:
/vendor/bin/lan_wan_config.sh set 1 192.168.158.15 1500 #配置IP
➢ 犀牛派X1的网口 IP:192.168.158.15
➢ X1网口子网掩码:255.255.255.0
➢ X1网口网关:192.168.158.1
可通过ifconfig查询br-lan(设备端口的桥接管理)已为雷达默认上传地址,二者在同一网段下。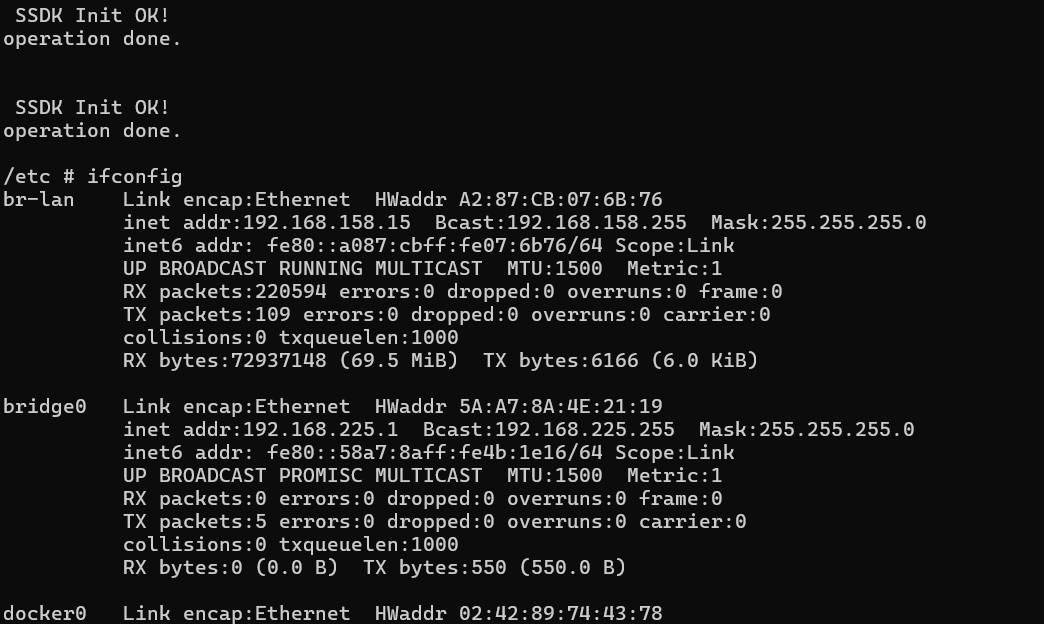
可通过犀牛派X1ping雷达ip ,能ping通说明网络已接通。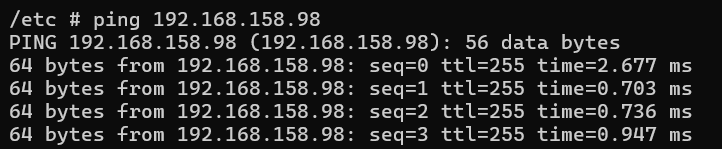
二、登录Aidlux
犀牛派X1开发板上预搭载了Aidlux系统平台,可通过多种方式登录:
1.外接显示屏(HDMI、DP)
2.板卡ip + 8000 端口web浏览器访问
3.通过终端登录
4.ssh 远程连接
5.融合系统版 可使用拷屏工具
登录详情可查看https://docs.aidlux.com/guide/hardware/development-board/X1技术文档
登录密码为:aidlux
可在aidlux桌面的应用中心下载Ubuntu桌面(用于机器人开发)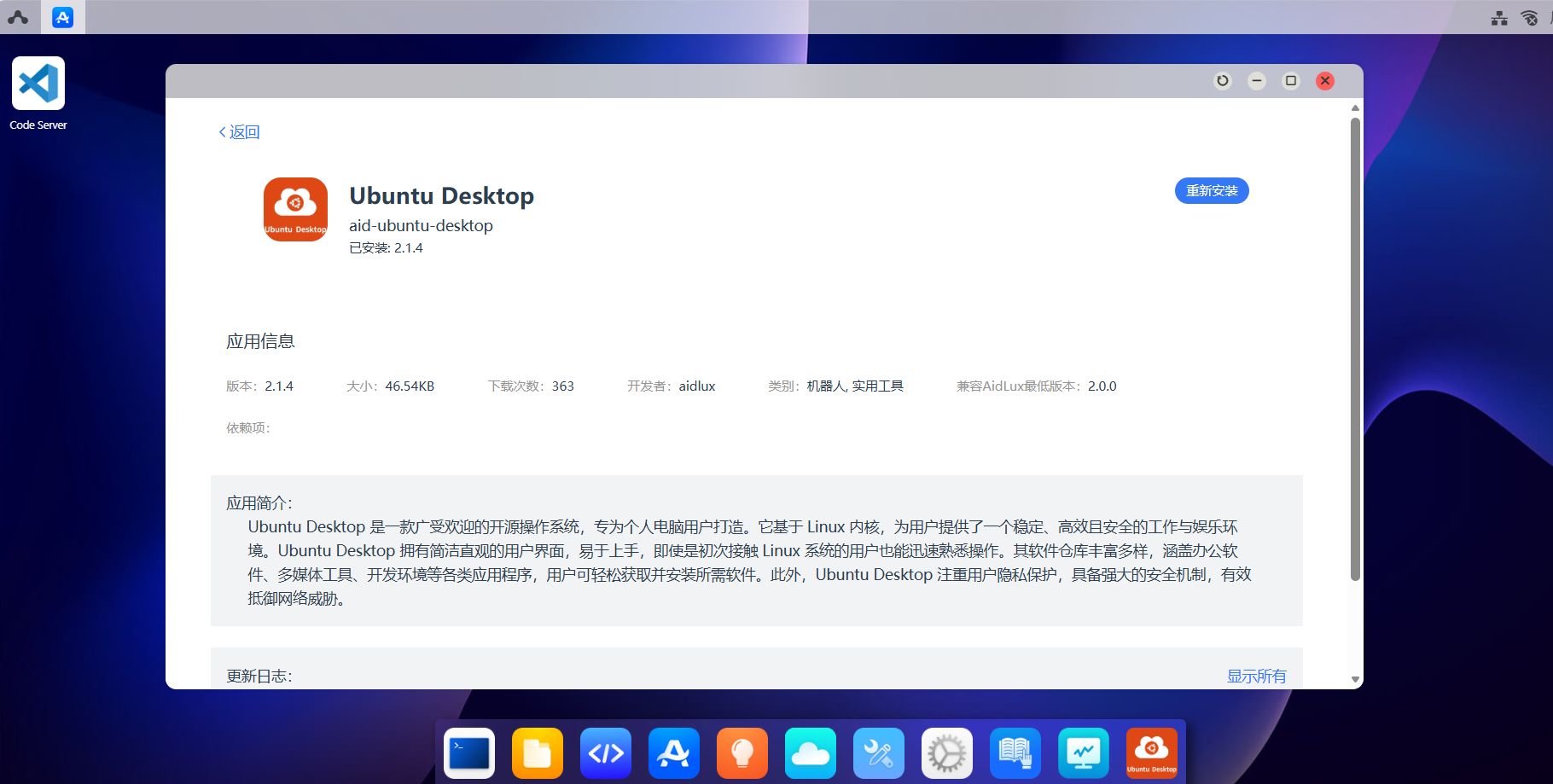
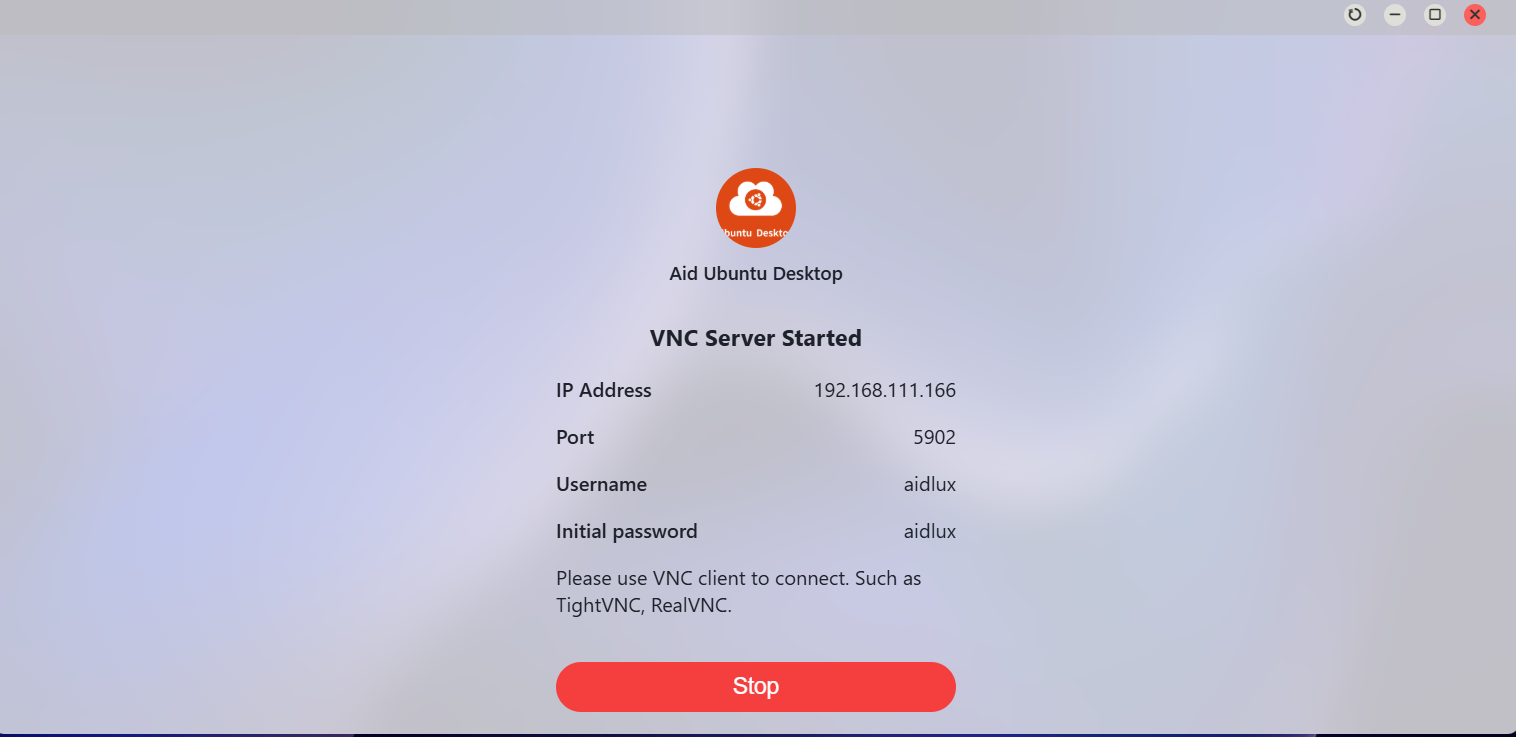
启动应用服务后,可通过VNC连接到机器人操作系统桌面。
(Ubuntu-Desktop仅为提供可视化机器人桌面环境,也可终端远程的方式直接使用,其他开发可在Aidlux桌面上完成)
三、获取并构建激光雷达的ROS2驱动包
从github获取蓝海ROS2驱动包,部署到ROS的工作空间下
cd /home/aidlux/
sudo su #密码:aidlux
mkdir -p ros_ws/src
cd ros_ws/src
mkdir lidar && cd lidar #存放功能包
git clone https://github.com/BlueSeaLidar/bluesea-ros2.git #下载驱动包
解压并编译
unzip bluesea-ros2-main.zip
cd ../.. #回到工作空间ros_ws
colcon build
将ROS 2核心环境配置到环境变量中:
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
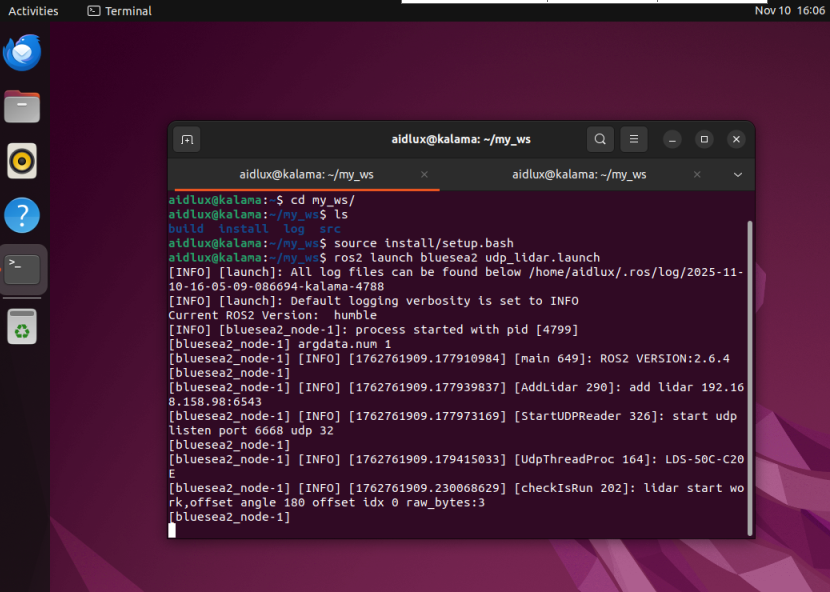
加载当前工作空间环境配置并尝试驱动激光雷达
source ./install/setup.bash
ros2 launch bluesea2 udp_lidar.launch #节点服务启动
四、在RVIZ2中查看激光雷达显示情况
ubuntu desktop的terminal中输入rviz2打开工具,
通过发布话题查看激光雷达在RVIZ2中的显示情况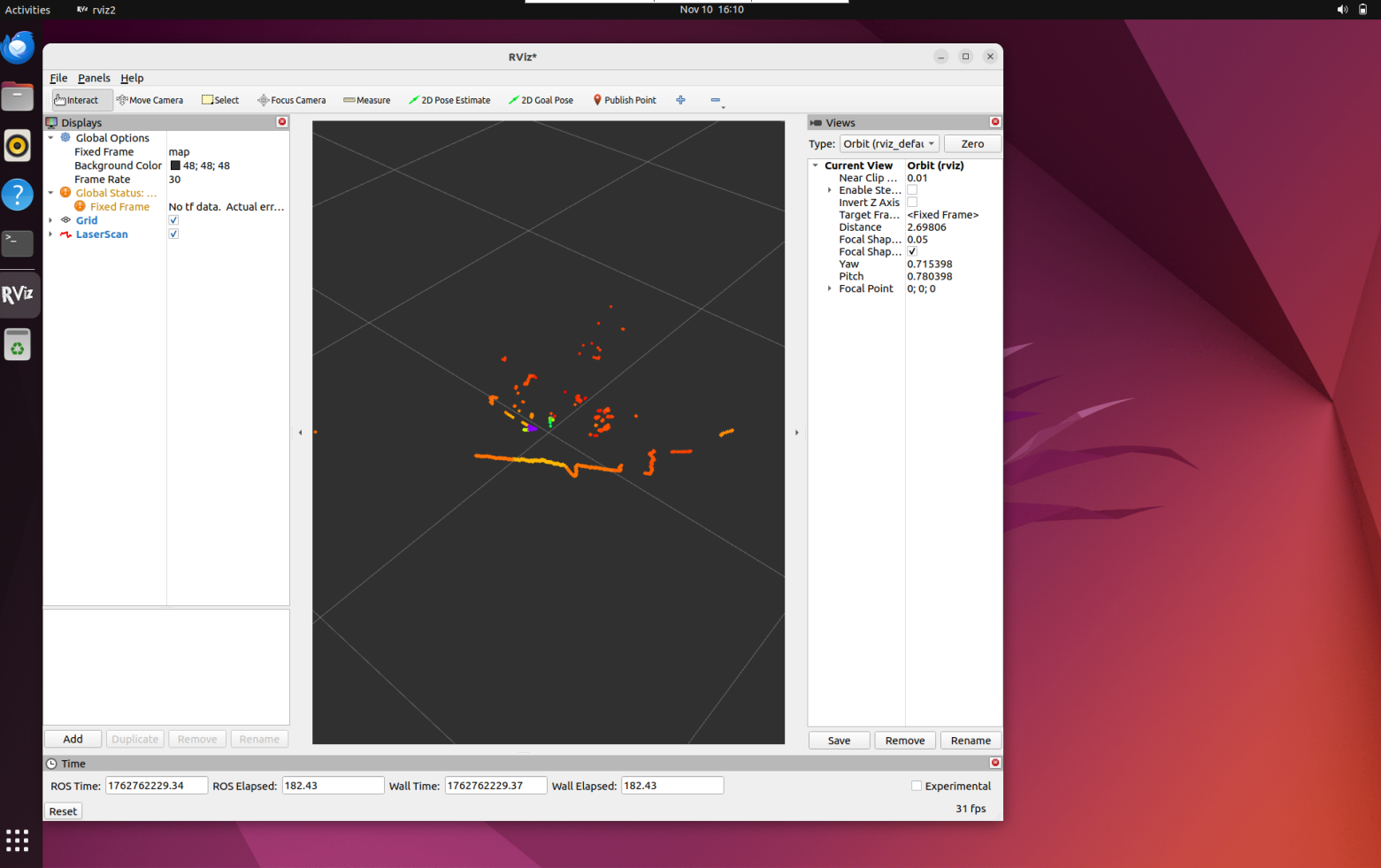
可以看到激光雷达成功连接到了犀牛派X1上并开始工作。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 11
11 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)