探索MPC:丰富的Matlab程序代码与应用之旅
几十套模型预测控制MPC相关matlab程序代码simulink+文档1、基于Koopman模型预测控制的非线性流控制的数据驱动框架2、一种用于非线性模型预测控制的并行优化工具包(NMPC)3、基于运动学车辆模型的开放式驾驶MPC横向控制算法4、移动机器人路径跟踪的设计与仿真模型预测控制5、基于ACADO工具包的自主车道跟踪和避障车辆的模型预测控制6、分层MPC控制器的实时车辆优控制和避障7、利用
几十套模型预测控制MPC相关matlab程序代码simulink+文档 1、基于Koopman模型预测控制的非线性流控制的数据驱动框架 2、一种用于非线性模型预测控制的并行优化工具包(NMPC) 3、基于运动学车辆模型的开放式驾驶MPC横向控制算法 4、移动机器人路径跟踪的设计与仿真模型预测控制 5、基于ACADO工具包的自主车道跟踪和避障车辆的模型预测控制 6、分层MPC控制器的实时车辆优控制和避障 7、利用随机有限集理论对蜂群的ILQR和MPC控制 8、具有飞行约束的无人机MPC 9、MPC在美国高速公路场景中移动的车辆上的实现 10、带挂载的四轴飞行器的MPC 11、基于MPC的仿真轨迹跟踪模块 12、非线性casadi模型预测控制 13、模型预测控制(MPC)基准测试问题的开放集合 14、轨迹优化和非线性模型预测控制(MPC)工具箱 15、过程控制代码,包括优化、模型预测控制(MPC)、移动视界、卡尔曼滤波器等 16、非线性弹簧质量系统的简单模型预测控制(MPC) 17、输出LC滤波器三相逆变器模型预测控制(MPC)仿真 18、低数据极限下模型预测控制的非线性动力学的稀疏识别 19、连续线性化模型的预测控制 20、MPC在美国高速公路场景中移动的车辆上的实现 21、四轮车辆轨迹规划 22、基于模型预测控制的车辆路径跟踪 23、基于MPC的永磁同步电机非线性终端滑模控制仿真研究 24、文档+程序 ee498风力发电机组模型预测控制应用项目。 对机器的定子侧进行电流控制。 dq框架用于简单性 25、文档+程序 基于模型预测控制的自动避障和汽车跟踪 26、文档+程序 多篇RMPC 鲁棒模型预测控制 27、文档+程序 USV的自动驾驶模型预测控制 28、文档+程序 动态四足机器人的自由模型预测控制 29、文档+程序 基于学习的模型预测控制 30、文档+程序 具有参考跟踪的模型预测控制(MPC)来模拟火箭在火星上的着陆 31、文档+程序 无人驾驶汽车模型预测控制 32、文档+程序 基于动态车辆模型的 Baidu Apollo lqr和mpc横向控制算法 33、文档+程序 读书笔记-无人驾驶车辆模型预测控制 34、文档+程序 基于在线优化的快速模型预测控制 35、文档+程序 避免车辆碰撞的网络模型预测控制的MATLAB仿真 36、文档+程序 具有输出LC滤波器的三相逆变器的前馈神经网络模型预测控制 价格说明
嘿,各位技术宅们!今天咱来聊一聊模型预测控制(MPC),这可是自动化控制领域的大热门。我最近接触到几十套MPC相关的Matlab程序代码,还搭配Simulink模型和文档,那内容叫一个丰富,忍不住要跟大家分享分享。
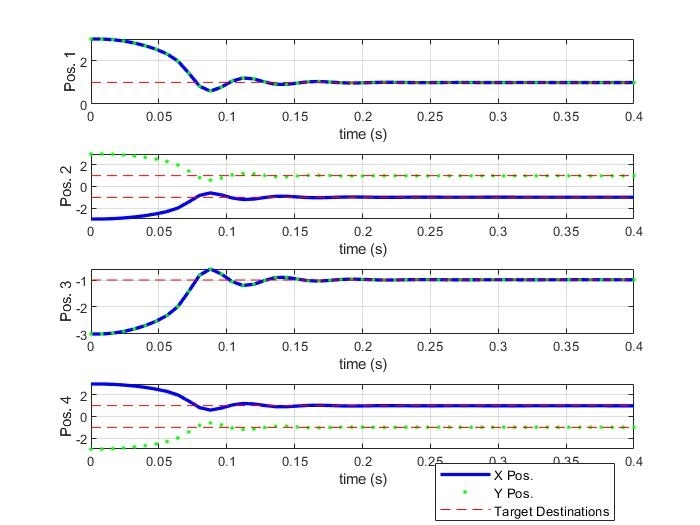
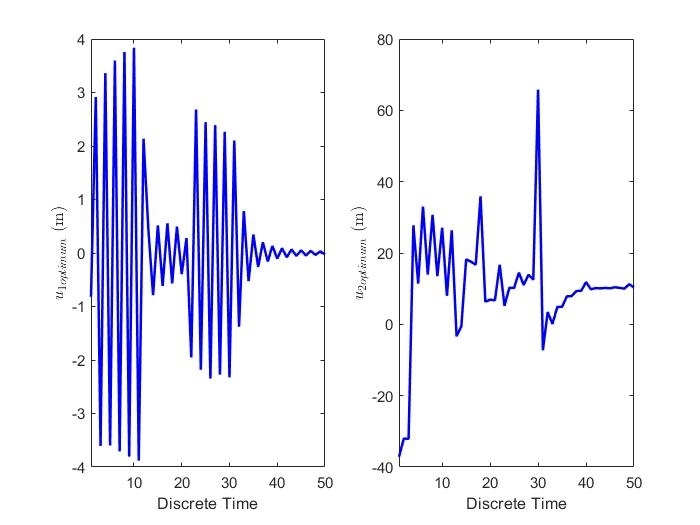
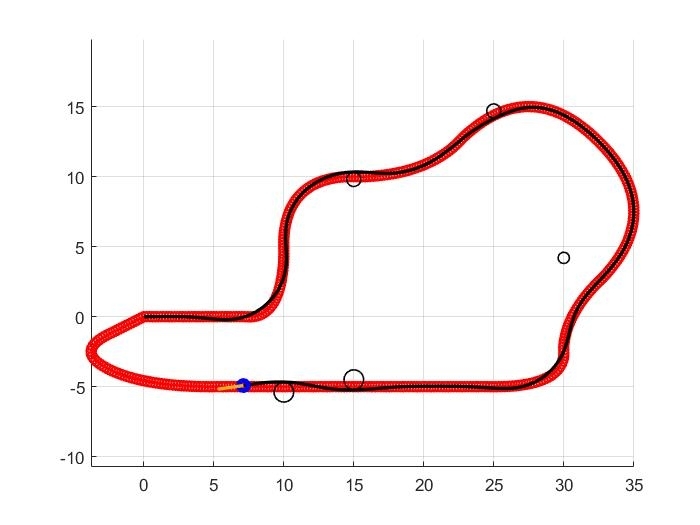
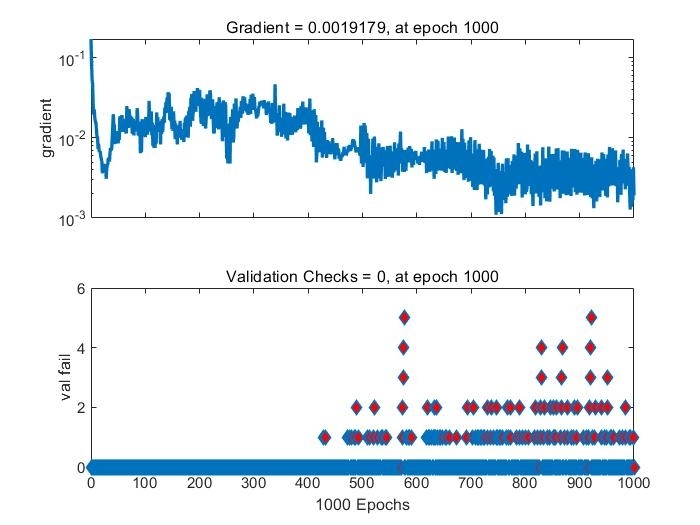
基于Koopman模型预测控制的数据驱动框架
这个框架利用Koopman算子来处理非线性系统,把非线性问题转化为线性问题来解决,这思路简直巧妙。在Matlab代码里,你可能会看到这样的关键部分:
% 构建Koopman模型
% 假设已有系统状态数据X和输入数据U
% 这里省略数据获取部分
[K, Psi] = build_koopman_model(X, U);
% build_koopman_model函数为自定义函数,用于构建Koopman模型
% K为Koopman矩阵,Psi为特征函数矩阵这段代码核心就是调用 buildkoopmanmodel 函数来构建Koopman模型,有了这个模型,后续的预测控制就有了基础。
非线性模型预测控制的并行优化工具包(NMPC)
非线性系统的控制一直是个挑战,而这个并行优化工具包就是来攻克它的。在代码实现上,会涉及到多线程并行计算来加速优化过程。
% 定义优化变量
nx = 5; % 状态变量数量
nu = 2; % 控制变量数量
N = 10; % 预测时域
opti = casadi.Opti();
x = opti.variable(nx, N+1);
u = opti.variable(nu, N);
% 并行设置部分
options = struct('ipopt.tol', 1e-6, 'print_time', 0, 'expand', true);
opti.solver('ipopt', options);
% 这里利用CasADi工具进行优化设置,ipopt为优化求解器上面代码先定义了优化变量,包括状态变量 x 和控制变量 u,然后设置优化求解器 ipopt 的参数,并行计算部分虽然代码中未完全展示,但在实际应用中会通过多核处理器等方式提升优化效率。
基于运动学车辆模型的开放式驾驶MPC横向控制算法
车辆控制可是MPC的重要应用场景。对于基于运动学车辆模型的横向控制,代码围绕着对车辆位置、方向等状态的预测和控制。
% 运动学车辆模型参数
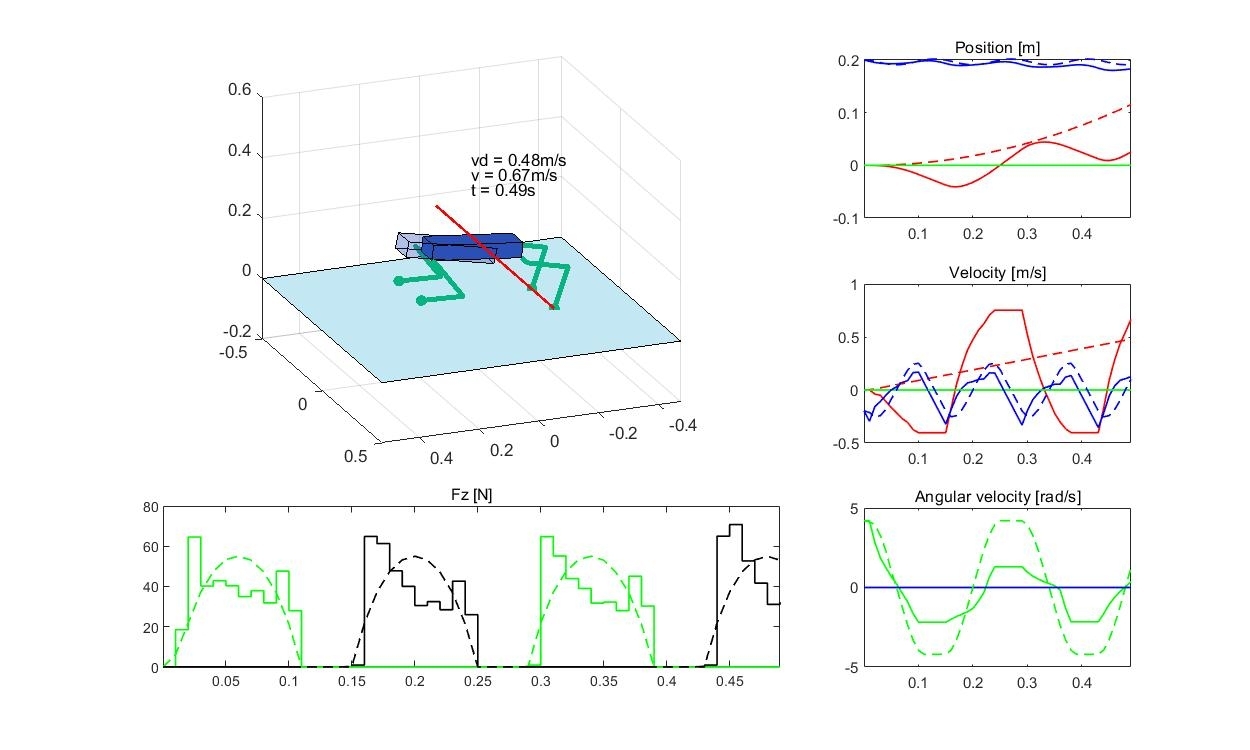
L = 2.5; % 车辆轴距
% 预测时域
N = 20;
dt = 0.1; % 采样时间
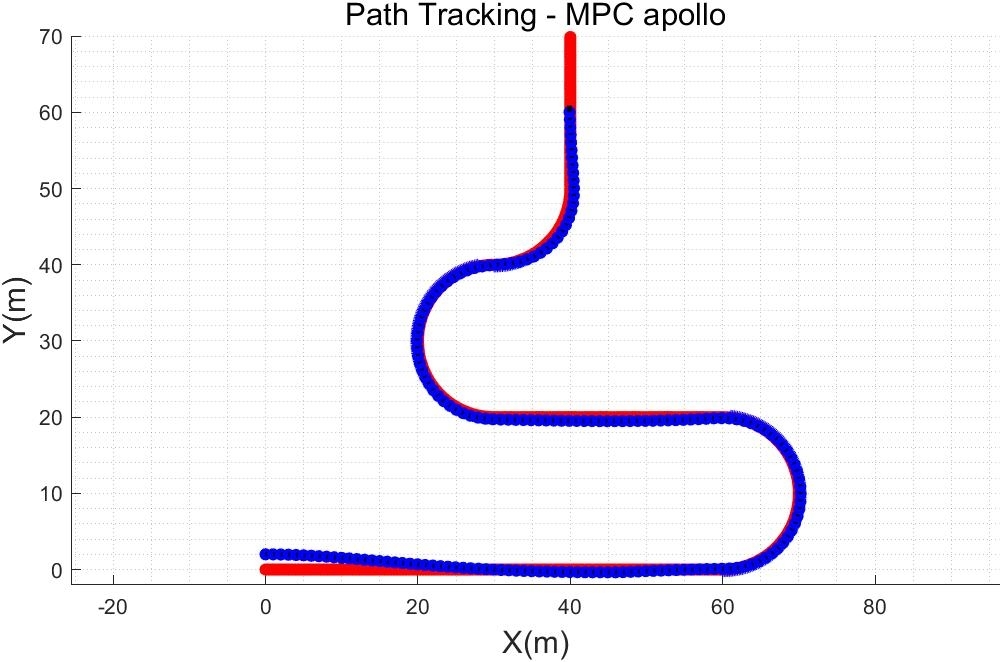
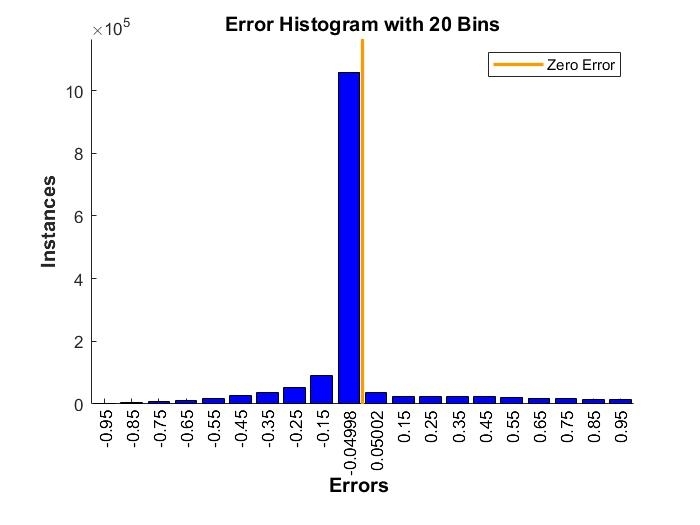
% 初始状态
x0 = [0; 0; 0]; % 初始位置和方向
for k = 1:N
% 预测下一时刻状态
x1 = x0 + [cos(x0(3))*dt; sin(x0(3))*dt; u(1,k)/L*dt];
% 这里u(1,k)为第k时刻的转向控制输入
x0 = x1;
end这段代码简单模拟了车辆在预测时域内的状态变化,依据运动学模型,根据当前状态和控制输入预测下一时刻状态,从而实现横向控制。
移动机器人路径跟踪
移动机器人要准确跟踪路径,MPC能发挥大作用。代码重点在于规划路径和实时调整机器人的动作。
% 定义机器人初始位置和目标位置
start_pos = [0, 0];
goal_pos = [10, 10];
% 假设已有路径规划算法得到路径点path_points
path_points = path_planning(start_pos, goal_pos);
% 模型预测控制部分
for i = 1:length(path_points)-1
current_pos = robot_state(); % 获取机器人当前状态
% 计算控制输入,使机器人向路径点移动
u = mpc_controller(current_pos, path_points(i, :));
move_robot(u); % 根据控制输入移动机器人
end这里先通过路径规划算法得到路径点,然后在MPC控制循环中,不断根据机器人当前位置和路径点计算控制输入,实现路径跟踪。
基于ACADO工具包的车辆控制
ACADO工具包为车辆的自主车道跟踪和避障提供了便捷。
% 引入ACADO工具包
acado_include;
% 定义车辆模型参数
nx = 4; % 状态变量数
nu = 2; % 控制变量数
% 定义ACADO模型
model = acado_ocp();
model.x = acado_variable(nx, 1);
model.u = acado_variable(nu, 1);
% 设置模型动力学方程,这里省略具体方程设置
% 目标函数设置
model.J = acado_cost();
% 约束条件设置,如避障约束等
model.con = acado_constraints();代码先引入ACADO工具包,然后定义车辆模型的状态和控制变量,接着设置目标函数和约束条件,利用ACADO工具包强大的功能实现车辆控制。
价格说明
这么多丰富的程序代码和文档,对于开发者和研究人员来说,绝对是一笔宝贵的财富。价格方面,具体得看获取途径和授权方式啦。如果是商业使用,可能需要根据使用规模和授权范围来定价;要是学术研究,说不定会有更优惠的方案。感兴趣的朋友不妨深入了解一下,相信会给你的MPC研究和项目带来不少助力。
今天就跟大家分享到这儿,希望这些MPC相关内容能激发你更多的创意和想法!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 14
14 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)