改进动态窗口DWA算法,模糊控制自适应调整评价因子权重,matlab代码 这段代码是一个基于动...
动态窗口法(DWA)作为移动机器人局部路径规划的经典方案,通过在速度空间采样生成候选轨迹并筛选最优解,实现避障与目标追踪。但传统DWA算法的评价函数权重固定,难以适配复杂动态环境,易出现避障保守或目标偏离等问题。本算法创新性地融入模糊控制理论,设计多维度模糊控制器实时调整评价因子权重,形成自适应能力更强的改进DWA算法。该算法通过MATLAB平台实现,核心代码由DWA.m(算法主体)与main.m
改进动态窗口DWA算法,模糊控制自适应调整评价因子权重,matlab代码 这段代码是一个基于动态窗口法(Dynamic Window Approach,DWA)的路径规划算法的实现。下面我将对代码进行分析,并解释算法的优势、需要注意的地方以及独特算法所用到的内容。 首先,代码开始时定义了一个地图map0,表示机器人的运动环境。地图中的0表示可通行的区域,1表示障碍物。接着,代码对地图进行了旋转,以保证地图和预期设置的地图一致。然后,获取了地图的高度和宽度。 接下来,代码设置了绘图的参数,并绘制了地图中的障碍物。障碍物的坐标保存在obstacle数组中。然后,代码定义了起始点和目标点,并在图中绘制了起始点和目标点。 接着,代码计算了机器人的初始航向角,使其朝向目标点,以防止陷入局部最优。然后,定义了机器人的状态,包括位置、航向、线速度和角速度。 代码中的dt表示仿真步长,predictT表示前向模拟时间。obs表示障碍物的坐标数组,collisionR表示碰撞半径。 接下来,代码定义了运动学的限制,包括最高速度、角速度、加速度、角加速度以及线速度和角速度的分辨率。evalParam表示评价函数的参数,包括航向、距离和速度的权重。 maxStep表示最大仿真步长。 最后,代码调用了DWA函数进行路径规划,并返回了路径和所有参数。然后,代码绘制了整条路径和权重因子的变化。 DWA算法的优势在于它能够在考虑机器人运动学约束的情况下,通过动态窗口的方式进行路径规划。它通过在速度和角速度的搜索空间中选择最优的速度和角速度,来避免碰撞并尽可能接近目标点。这种方法可以在较短的时间内找到一条安全且有效的路径。 需要注意的地方包括:地图的设置需要符合实际情况,障碍物的位置需要正确标注,运动学限制和评价函数的参数需要根据实际情况进行调整。 这段代码中的独特算法主要是动态窗口法(DWA),它通过搜索速度和角速度的空间来选择最优的运动策略。此外,代码中还使用了旋转操作来保证地图和预期设置的地图一致。
一、算法概述
动态窗口法(DWA)作为移动机器人局部路径规划的经典方案,通过在速度空间采样生成候选轨迹并筛选最优解,实现避障与目标追踪。但传统DWA算法的评价函数权重固定,难以适配复杂动态环境,易出现避障保守或目标偏离等问题。本算法创新性地融入模糊控制理论,设计多维度模糊控制器实时调整评价因子权重,形成自适应能力更强的改进DWA算法。该算法通过MATLAB平台实现,核心代码由DWA.m(算法主体)与main.m(仿真配置)构成,可在结构化障碍环境中完成高效、安全的自主路径规划。
二、核心功能模块拆解
(一)环境建模与参数初始化模块(main.m)
该模块为算法运行提供基础环境与参数配置,是路径规划的前置准备单元:
- 地图构建:采用20×20矩阵
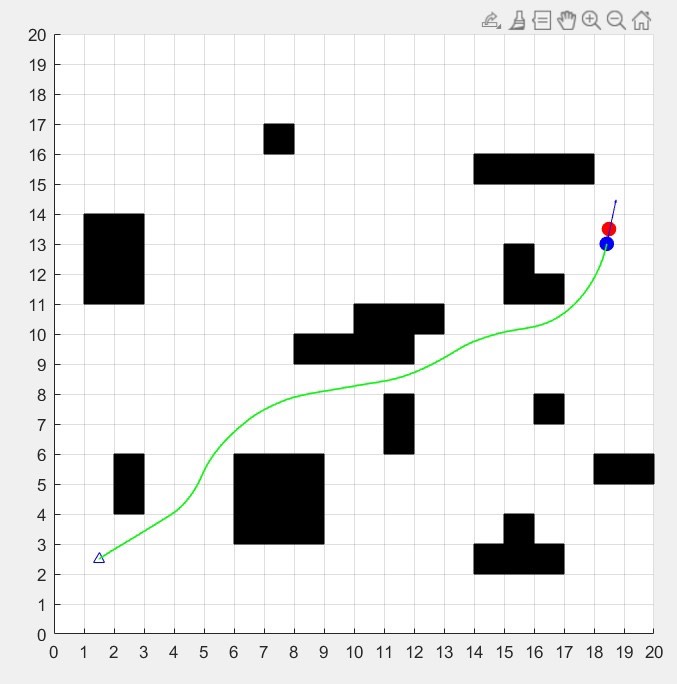
map0定义环境,其中1代表障碍物、0代表可通行区域。通过rot90函数将矩阵旋转270°,确保地图与预期物理场景一致,同时获取地图高度和宽度用于坐标系设置。 - 障碍物提取:遍历地图矩阵,将所有标记为1的障碍物坐标提取至
obstacle数组,并通过黑色方块在仿真界面中可视化呈现,为碰撞检测提供数据支撑。 - 核心参数配置:
- 机器人状态初始化:起始点[1.5, 2.5]、目标点[18.5, 13.5],初始航向角根据起始点与目标点的相对位置计算,确保机器人初始朝向目标方向,避免局部最优陷阱;机器人初始状态向量robotState包含位置、航向角、线速度、角速度,初始速度均设为0。
- 仿真参数:仿真步长dt=0.1s、前向模拟时间predictT=3s、最大仿真步数maxStep=2000,碰撞半径collisionR=0.5m(用于判断到达目标与碰撞风险)。
- 运动学约束:设置机器人最大线速度0.6m/s、最大角速度30°/s、最大线加速度0.2m/s²、最大角加速度60°/s²,以及线速度、角速度采样分辨率(0.01m/s、1°/s),确保速度采样符合机器人物理运动极限。 - 可视化配置:设置仿真窗口大小、坐标系范围、网格样式,通过不同颜色标记起始点(蓝色圆形)、目标点(红色圆形),为实时观察算法运行状态提供直观界面。
(二)动态窗口生成模块(DynamicWindow函数)
动态窗口是速度采样的合法范围,需同时满足机器人当前运动状态与物理约束,功能如下:
- 基础约束定义:设定线速度下限为0、上限为运动学极限中的最大线速度;角速度上下限为运动学极限中最大角速度的正负值(对称范围)。
- 动态约束计算:结合机器人当前线速度、角速度及最大加加速度,计算dt时间内的速度变化范围,即:
- 线速度动态范围:[max(0, 当前线速度-最大线加速度×dt), min(最大线速度, 当前线速度+最大线加速度×dt)]
- 角速度动态范围:[max(-最大角速度, 当前角速度-最大角加速度×dt), min(最大角速度, 当前角速度+最大角加速度×dt)] - 输出结果:最终得到线速度采样窗口
[vMin, vMax]与角速度采样窗口[wMin, wMax],确保后续速度采样均在机器人可控运动范围内。
(三)候选轨迹生成与碰撞检测模块
1. 轨迹生成(Step与GetTrajectory函数)
- Step函数:基于差分驱动机器人运动学模型,通过状态转移矩阵计算dt时间内的机器人状态更新。状态转移方程为
x=Ax+Bu,其中A为状态矩阵、B为输入矩阵、u为控制量(线速度v、角速度w),最终实现位置(x,y)、航向角θ的更新,且保持线速度、角速度暂不变化。 - GetTrajectory函数:针对每个采样速度(v,w),循环调用Step函数,生成未来
predictT时间内的完整轨迹,轨迹点数量为predictT/dt,并将轨迹坐标存储于traj矩阵,为后续评价与筛选提供候选路径。
2. 碰撞检测(Collision与BrakeDistance函数)
- 制动距离计算:BrakeDistance函数模拟机器人以最大减速度减速至停止的过程,累计计算制动所需的总距离,为碰撞风险预判提供关键指标。
- 碰撞判断逻辑:遍历所有障碍物,计算机器人轨迹末端位置与障碍物的直线距离,若该距离小于制动距离,则判定该轨迹存在碰撞风险(即使当前轨迹点未接触障碍物,也可能因无法及时减速导致碰撞),直接剔除该候选速度(v,w),确保路径安全性。
(四)轨迹评价与模糊自适应权重调整模块(核心改进)
1. 轨迹评价函数(Fitness函数)
从三个关键维度对候选轨迹进行量化评分,形成评价向量[heading, dist, vel],评分越高代表轨迹越优:
- 航向评价(Heading):计算机器人航向角与“机器人-目标连线”的夹角,通过
pi - 夹角转化为评分,夹角越小评分越高,确保轨迹始终朝向目标方向。 - 距离评价(Dist):遍历轨迹上所有点与障碍物的距离,取最小值作为评分(上限为3m),距离越大评分越高,保障路径避障安全性。
- 速度评价(Velocity):直接以当前线速度v作为评分,速度越高评分越高,提升机器人运动效率。
2. 评价函数正则化(NormalizeEval函数)
对评价向量的三个维度分别进行归一化处理,消除不同维度量纲差异对权重计算的影响,使各评价指标具备可比性,为后续权重融合奠定基础。
3. 模糊控制权重调整(核心创新点)
通过三个独立模糊控制器(DirectionFuz.fis、SafeFuz.fis、CombineFuz.fis)动态调整评价因子权重,实现权重自适应优化:
- 输入模糊变量:目标距离(Gd,取最小值3m)、目标方位角(Hd,机器人航向与目标方向的夹角,转化为-180°~180°)、障碍物最小距离(Od,机器人当前位置与障碍物的最近距离)。
- 模糊控制器功能:
1. 方向模糊控制器(DirectionFuz.fis):输入目标距离与目标方位角,输出航向权重修正系数与速度权重修正系数,当目标方位角偏差大时增大航向权重,目标距离远时增大速度权重。
2. 安全模糊控制器(SafeFuz.fis):输入障碍物最小距离与目标距离,输出距离权重修正系数与速度权重修正系数,障碍物距离近时增大距离权重,目标距离近时减小速度权重。
3. 融合模糊控制器(CombineFuz.fis):输入障碍物最小距离与目标方位角,输出权重融合系数(0~1),用于融合方向控制器与安全控制器的输出权重——障碍物近时偏向安全权重,目标方位偏差大时偏向方向权重。 - 最终权重计算:通过融合系数将两个控制器的输出权重线性融合,得到最终评价因子权重
combineParam,确保权重调整贴合实时环境场景。
(五)最优轨迹筛选与机器人状态更新模块
- 最优轨迹筛选:计算归一化评价向量与最终权重的加权和,选取加权和最大的轨迹作为最优轨迹,同时记录对应的控制量(线速度v、角速度w)。
- 机器人状态更新:将最优控制量赋值给机器人,调用Step函数更新机器人的位置、航向角等状态,并将当前位置存入路径矩阵
path,累计路径点数量。 - 实时可视化更新:每一步仿真后刷新界面,重新绘制起始点、目标点、障碍物、最优候选轨迹、机器人当前位置及航向(通过蓝色箭头表示),直观呈现机器人运动过程与路径规划结果。
(六)终止条件判断模块
在算法循环过程中实时检测终止条件,确保运行可控:
- 成功终止:当机器人与目标的距离小于碰撞半径
collisionR时,输出“Success! Robot has Arrived”并终止循环,判定任务完成。 - 步数终止:当循环步数达到
maxStep=2000时,自动终止循环,避免因局部最优导致无限运行。 - 碰撞终止:若机器人与障碍物距离小于碰撞半径,输出“Collision Occurred!!!”并终止运行,提供安全预警。
三、算法核心优势
- 自适应能力强:通过模糊控制实时调整评价因子权重,解决传统DWA固定权重难以适配复杂环境的问题,在障碍物密集区域侧重避障,在开阔区域侧重速度与目标方向。
- 避障安全性高:引入制动距离计算,不仅检测轨迹点与障碍物的实时距离,还预判减速制动所需空间,避免“即时无碰撞但无法减速避险”的潜在风险。
- 路径规划高效:优化轨迹采样与评价逻辑,在保证安全性的前提下,通过速度评价因子提升机器人运动效率,缩短到达目标的时间。
- 可视化直观:实时动态绘制环境、轨迹与机器人状态,便于观察算法运行过程,为调试优化提供清晰的视觉反馈。
四、运行说明
- 环境要求:MATLAB R2016b及以上版本,需安装模糊逻辑工具箱(Fuzzy Logic Toolbox)以支持模糊控制器调用。
- 文件准备:确保
DWA.m、main.m与三个模糊控制器文件(DirectionFuz.fis、SafeFuz.fis、CombineFuz.fis)位于同一目录下。 - 运行步骤:在MATLAB中直接运行
main.m,即可启动仿真,观察机器人从起始点到目标点的自主避障与路径规划全过程。 - 乱码处理:若出现中文乱码,可参考readme.txt说明,粘贴bm.rar中txt文件的内容替换相关中文注释。
五、应用场景
适用于室内仓储AGV、服务机器人、园区巡检机器人等移动设备,可在结构化障碍环境中实现自主导航,也可作为教学科研中局部路径规划算法的改进案例,为模糊控制与DWA算法的结合应用提供实践参考。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 5
5 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)