西门子1200立库机器人码垛机伺服视觉AGV程序探索
西门子1200立库机器人码垛机伺服视觉AGV程序 包括2台西门子PLC1215程序和2台西门子触摸屏TP700程序PLC与工业相机视觉定位及机器人使用Modbus TCP通讯PLC和码垛机Modbus TCP通讯(SCL语言)PLC和4台G120变频使用Profinet通讯1个伺服轴,AGVSCL语言和梯形图混编,学习实用性广,知识点丰富,有注释最近在研究西门子1200相关的工业自动化项目,发现其
西门子1200立库机器人码垛机伺服视觉AGV程序 包括2台西门子PLC1215程序和2台西门子触摸屏TP700程序 PLC与工业相机视觉定位及机器人使用Modbus TCP通讯 PLC和码垛机Modbus TCP通讯(SCL语言) PLC和4台G120变频使用Profinet通讯 1个伺服轴,AGV SCL语言和梯形图混编,学习实用性广,知识点丰富,有注释
最近在研究西门子1200相关的工业自动化项目,发现其中立库机器人码垛机伺服视觉AGV程序非常有趣且极具学习价值,今天就来和大家分享一下。
这个项目涉及到多种设备之间的协同工作,包括2台西门子PLC1215程序以及2台西门子触摸屏TP700程序。不同设备之间通过各种通讯协议实现数据交互与控制。
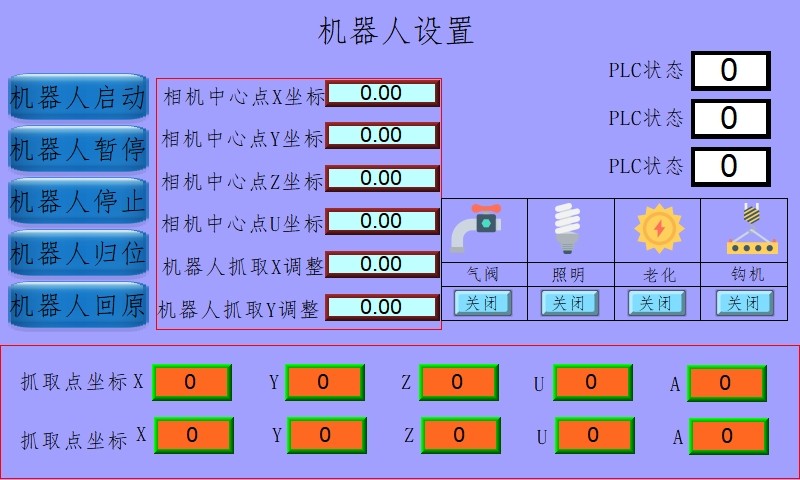
PLC与工业相机视觉定位及机器人的Modbus TCP通讯
Modbus TCP是一种在工业领域广泛应用的通讯协议,用于在不同设备之间进行数据交换。在PLC与工业相机视觉定位及机器人通讯这块,使用Modbus TCP能够精准地获取相机识别的物体位置信息,并传递给机器人,让机器人完成精准抓取等动作。
下面是一段简单模拟使用Modbus TCP通讯获取相机位置信息的SCL代码示例:
// 定义变量
VAR
MB_CLIENT : MB_CLIENT; // Modbus TCP客户端指令
Error : DINT; // 错误代码
Camera_X_Pos : REAL; // 相机识别物体的X坐标
Camera_Y_Pos : REAL; // 相机识别物体的Y坐标
END_VAR
// 调用Modbus TCP客户端指令
MB_CLIENT(
REQ := TRUE, // 每次扫描都请求通讯
CONNECT := Connect_DB[0], // 连接数据块
DB_NO := 1, // 数据块号
RD_LEN := 8, // 读取长度,假设X、Y坐标各占4个字节
RD_ADDR := 100, // 起始读取地址
DATA_PTR := P#Camera_X_Pos, // 数据存储指针
DONE => Done,
ERROR => Error
);代码分析:首先我们定义了用于Modbus TCP通讯的客户端指令 MBCLIENT 以及一些变量,像错误代码 Error,还有用于存储相机识别物体坐标的 CameraXPos 和 CameraYPos。然后在调用 MBCLIENT 指令时,REQ 设置为 TRUE 表示每次扫描都发起通讯请求,CONNECT 关联连接数据块,DBNO 指定数据块号,RDLEN 确定要读取的数据长度,RDADDR 是起始读取地址,DATAPTR 则是将读取到的数据存储到我们定义的变量位置。
PLC和码垛机Modbus TCP通讯(SCL语言)
同样基于Modbus TCP通讯协议,PLC与码垛机之间也建立起了紧密联系。通过SCL语言编写的代码,可以灵活地控制码垛机的各种动作,比如货物的抓取、放置高度、码垛顺序等。
以下是一段控制码垛机上升动作的SCL代码:
// 定义变量
VAR
MB_WRITER : MB_CLIENT; // Modbus TCP写指令
Error_Write : DINT; // 写操作错误代码
Lift_Command : INT := 1; // 上升命令值
END_VAR
// 调用Modbus TCP写指令控制码垛机上升
MB_WRITER(
REQ := Rising_Edge, // 上升沿触发写操作
CONNECT := Connect_DB[1], // 连接数据块
DB_NO := 2, // 数据块号
WR_LEN := 2, // 写入长度,假设命令值占2个字节
WR_ADDR := 200, // 起始写入地址
DATA_PTR := P#Lift_Command, // 命令值存储指针
DONE => Write_Done,
ERROR => Error_Write
);代码分析:这里定义了 MBWRITER 用于Modbus TCP的写操作,还有错误代码 ErrorWrite 以及上升命令值 LiftCommand。当上升沿信号 RisingEdge 触发时,MBWRITER 指令将 LiftCommand 的值通过指定的数据块和地址写入到码垛机对应的寄存器中,从而控制码垛机执行上升动作。
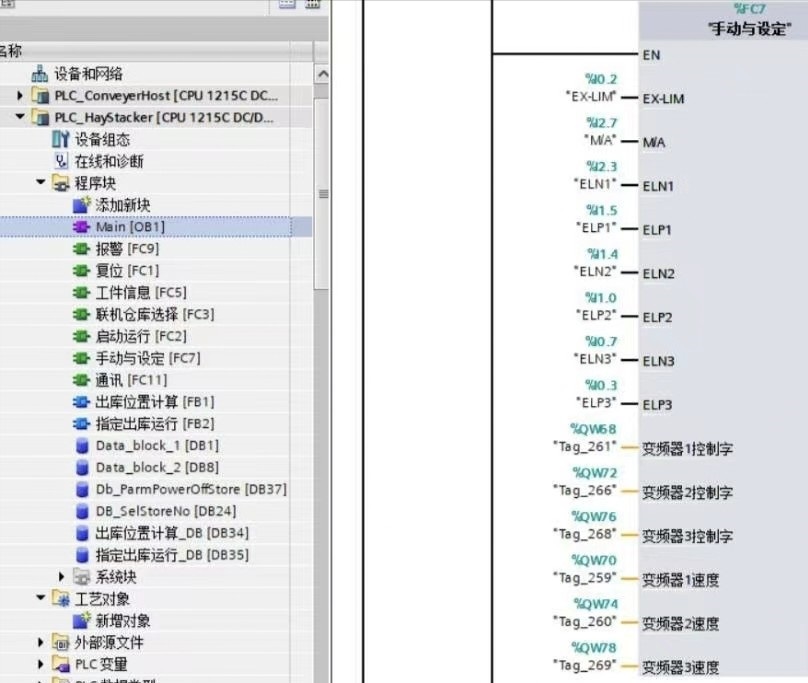
PLC和4台G120变频使用Profinet通讯
Profinet是一种高性能的工业以太网通讯协议,用于PLC与变频器等设备之间的快速、可靠通讯。在这个项目中,PLC通过Profinet与4台G120变频器通讯,能够精准地控制电机的转速、转向等参数。
在TIA Portal中配置Profinet通讯相对直观,只需在硬件组态中添加G120变频器设备,并设置好IP地址、设备名称等参数,就可以建立起通讯连接。
在程序中,可以使用系统功能块来读写变频器的参数,例如下面的梯形图代码片段用于读取变频器的当前转速:
代码分析:通过特定的系统功能块,连接到对应的G120变频器设备,设置好读取参数的地址等信息,就可以实时获取变频器的当前转速值,并在PLC程序中进一步处理,比如用于监控或者根据转速调整其他设备的运行状态。
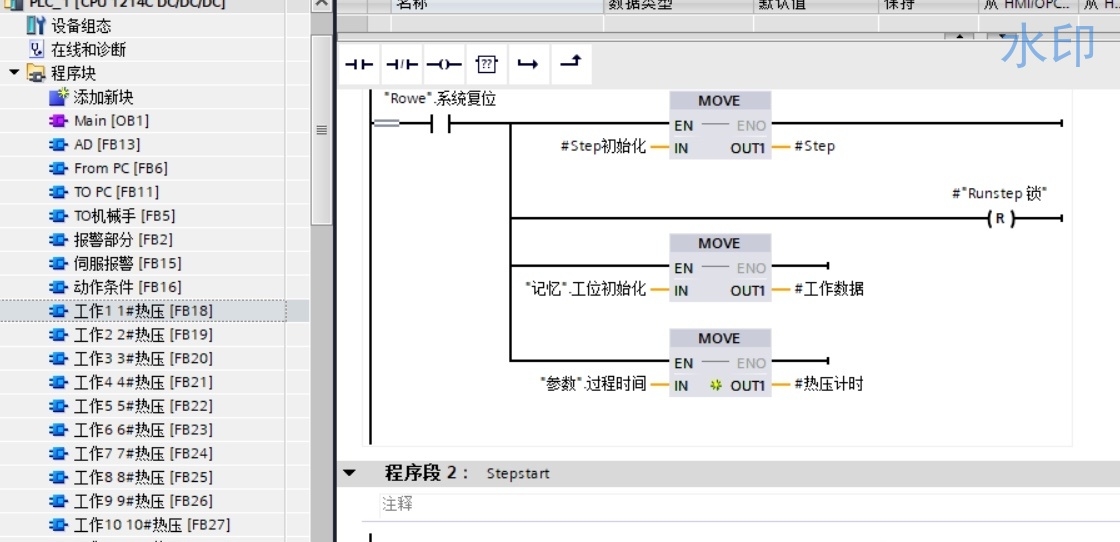
1个伺服轴,AGV
项目中的1个伺服轴控制着AGV的运动。通过SCL语言和梯形图混编,可以实现对AGV的精确位置控制和速度调节。
以下是一段简单的SCL代码用于控制伺服轴以特定速度移动到指定位置:
// 定义变量
VAR
Axis_Move : MC_MoveAbsolute; // 绝对定位指令
Axis_Pos : LREAL := 100.0; // 目标位置
Axis_Velocity : LREAL := 50.0; // 移动速度
Axis_Done : BOOL;
Axis_Error : DINT;
END_VAR
// 调用绝对定位指令
Axis_Move(
POSITION := Axis_Pos,
VELOCITY := Axis_Velocity,
DONE => Axis_Done,
ERROR => Axis_Error
);代码分析:这里使用了 MCMoveAbsolute 绝对定位指令,定义了目标位置 AxisPos 和移动速度 AxisVelocity。当指令执行时,伺服轴将按照设定的速度移动到指定位置,AxisDone 用于指示定位完成,Axis_Error 则用于反馈可能出现的错误。
整个西门子1200立库机器人码垛机伺服视觉AGV程序,通过SCL语言和梯形图混编的方式,将各种设备有机结合起来,实现了复杂的工业自动化任务。这种混编方式不仅提高了程序的灵活性和可读性,也为我们学习工业自动化控制提供了丰富的知识点和实用的案例。希望今天的分享能让大家对这类项目有更深入的了解。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 4
4 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)