基于Arduino的移动机器人的相关说明
笔者在学期初的时候,跟着赵虚左老师的ROS课程手搓了一个基于Arduino的移动机器人,当时完成机器人基于键盘节点的移动控制初步测试后,未继续开发建图及导航功能。
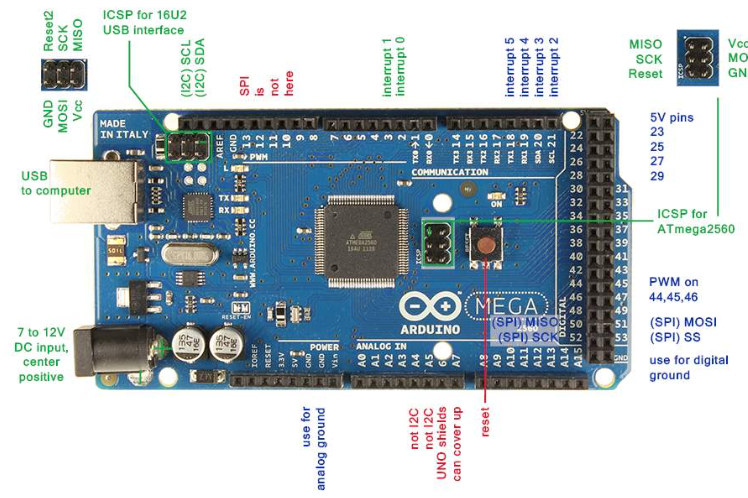
先说所用到的硬件,该移动机器人的开发板型号是Arduino mega 2560。
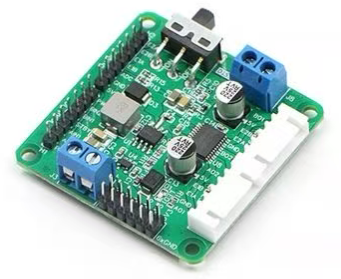
电机驱动用的是TB6612电机驱动板。
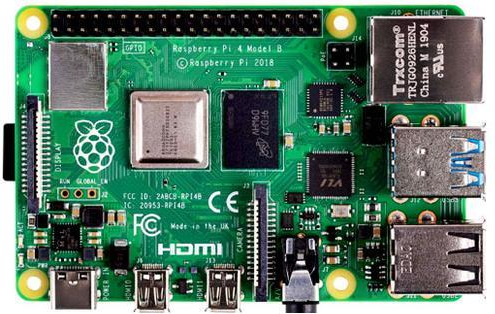
上位机是树莓派4B
关于直流减速电机,电机编码器和雷达这里就不一一列举了。这里雷达笔者使用的是乐动LD14P,买完雷达之后可以问客服要相关代码,你只需要跟着教程修改一下串口信息,然后将具体launch文件集成到机器人使能的总launch文件里即可。
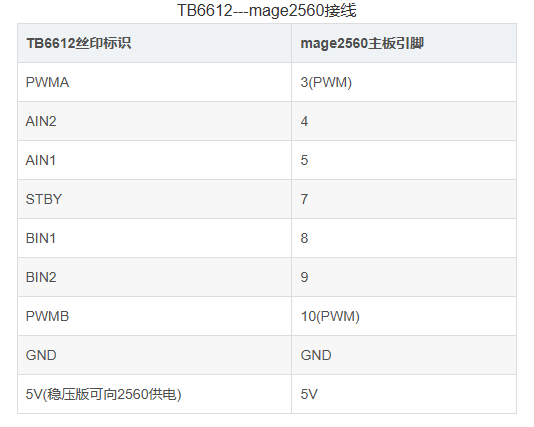
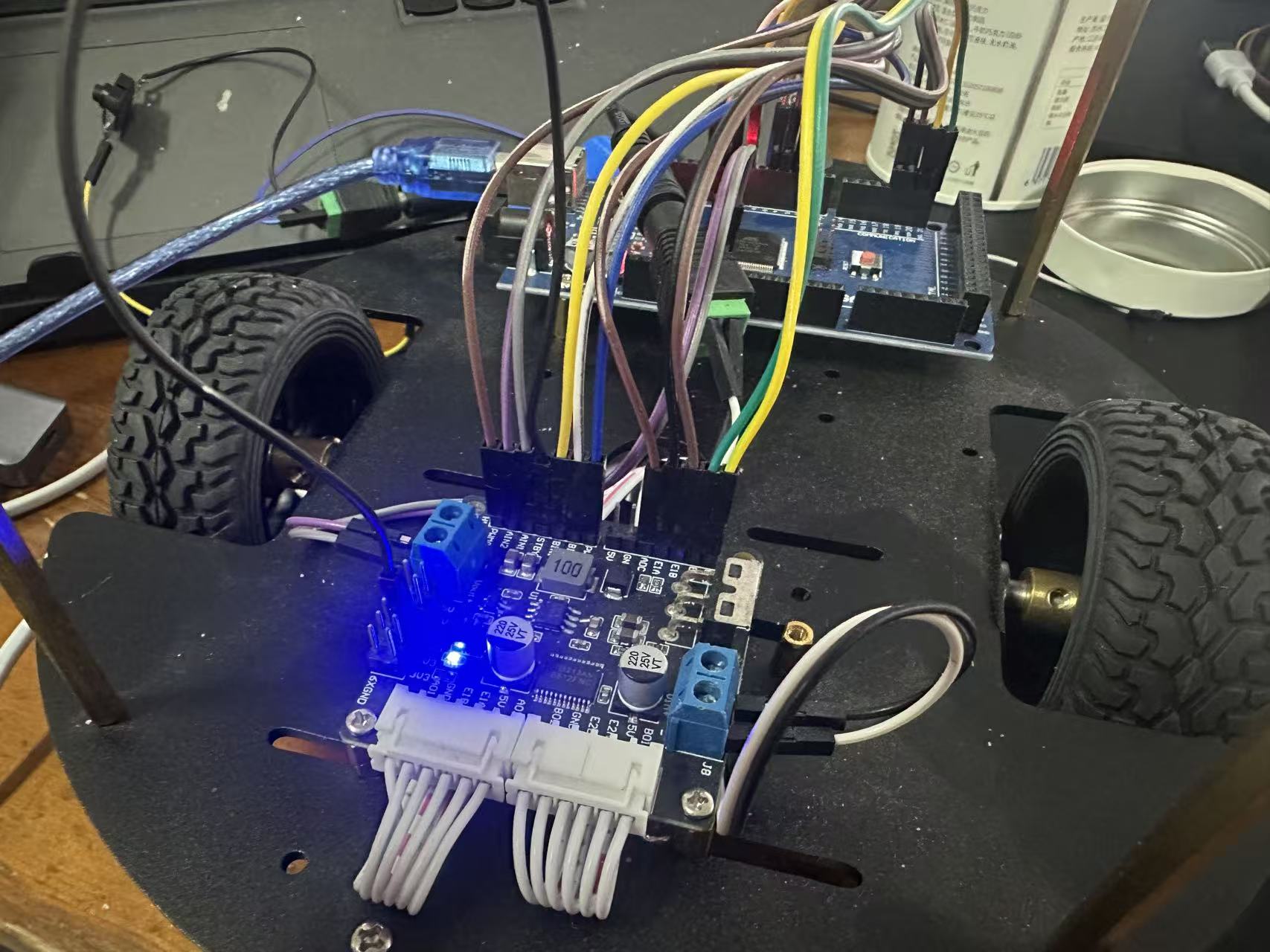
先说硬件的具体连接吧,mega2560和TB6612的具体接线如下图所示。
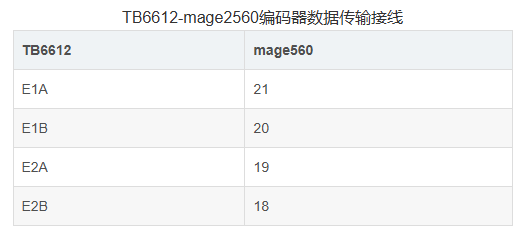
这里TB6612需要两个串口来控制一个电机的方向,具体控制逻辑如下图。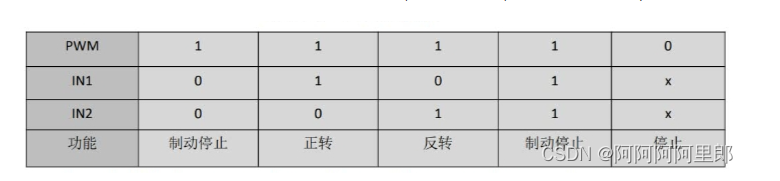
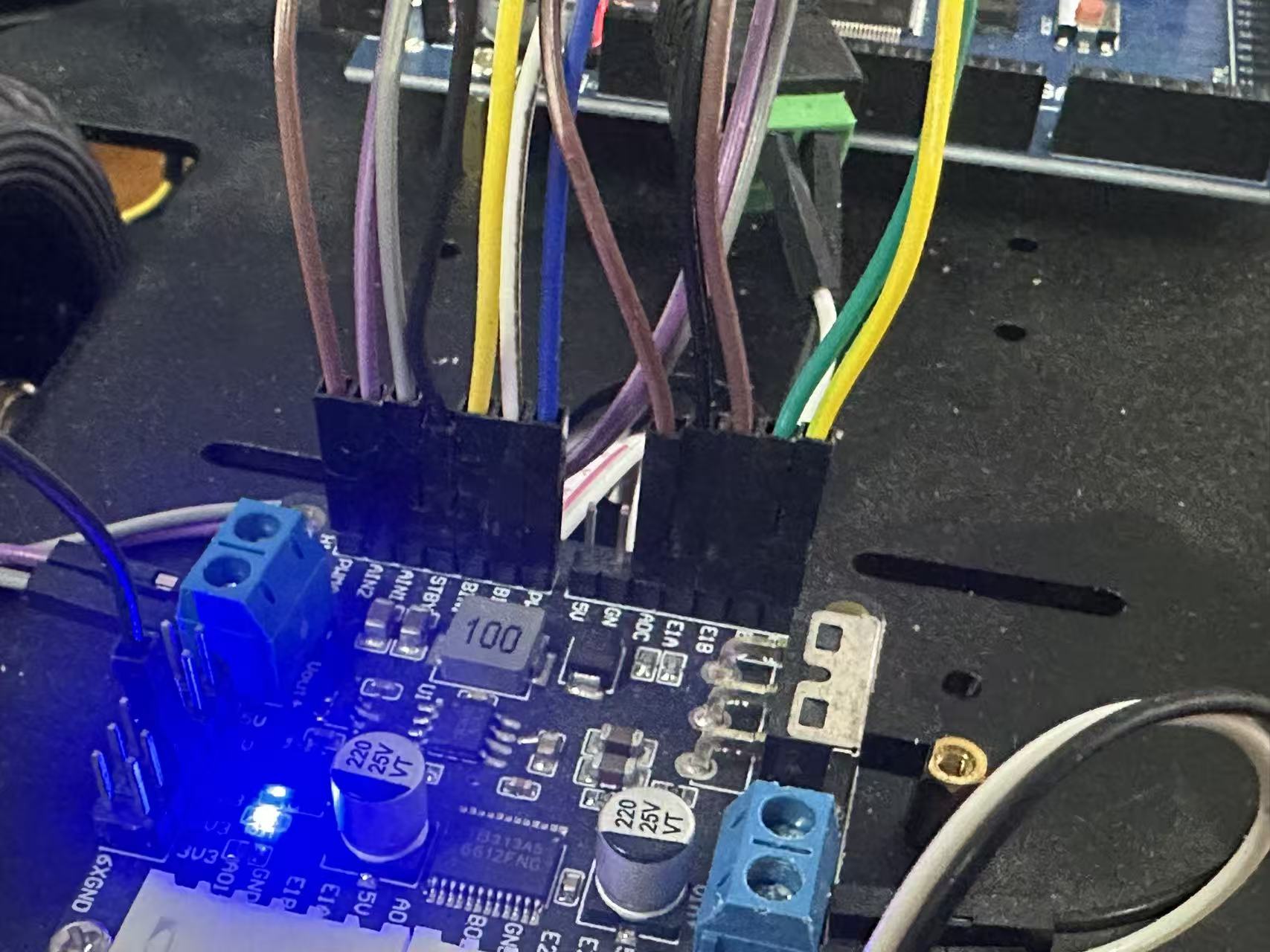
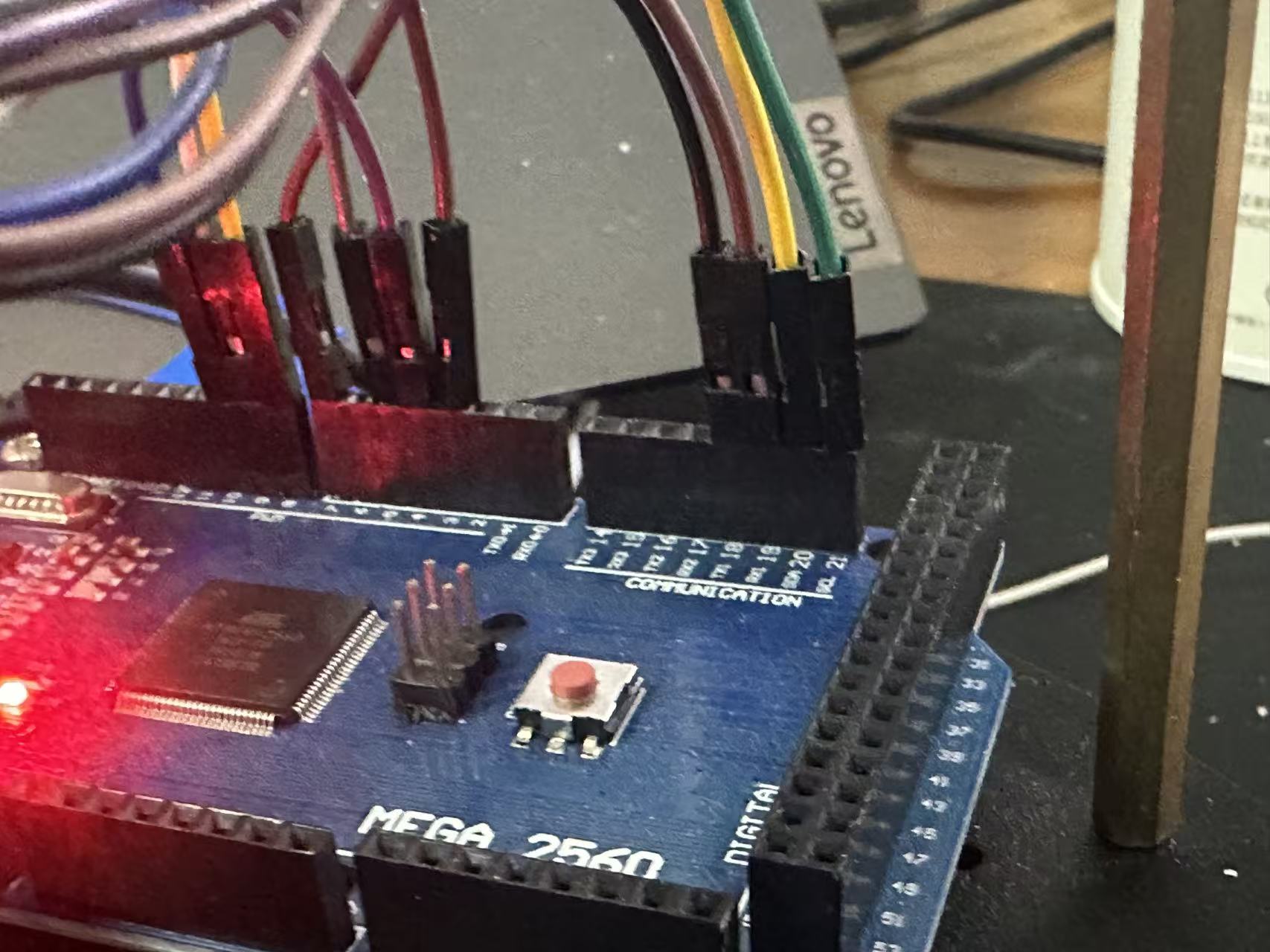
笔者的接线也作为记录和参考,放在下面。
———————————————————————————————————————————
然后具体的软件方面的实现跟着赵老师的课程来就可以了,但是还有一些问题需要说明一下。
1、赵老师课程里使用的驱动板与我们使用的TB6612不同,所以在使用ros_arduino_bridge进行电机测速,电机调速等操作时,需要对代码进行一些修改。
(1)修改 arduino_params.yaml 文件
# 端口配置
port: /dev/ttyACM0
baud: 57600
# 机器人参数
robot_base_frame: base_footprint
# 更新为您的实际轮子参数
wheel_diameter: 0.065 # 轮子直径(米)
wheel_track: 0.26 # 两轮间距(米)
encoder_resolution: 1560 # 编码器每转脉冲数
# PID参数(需要根据实际调整)
Kp: 10
Kd: 0
Ki: 0
Ko: 50
# 电机方向(根据接线可能需要调整)
motor_left_dir: 1 # 1为正,-1为反向
motor_right_dir: -1
# 电机引脚配置 - 根据TB6612接线修改
motor_driver: TB6612
max_pwm: 255 # PWM最大值
motor_left_pwm_pin: 5
motor_left_dir1_pin: 7 # TB6612的AIN1
motor_left_dir2_pin: 6 # TB6612的AIN2
motor_right_pwm_pin: 10
motor_right_dir1_pin: 9 # TB6612的BIN1
motor_right_dir2_pin: 8 # TB6612的BIN2
# 编码器引脚配置 - 使用Mega的中断引脚
encoder_driver: Quadrature
encoder_left_pin_a: 2 # 外部中断0
encoder_left_pin_b: 22 # 普通数字引脚
encoder_right_pin_a: 3 # 外部中断1
encoder_right_pin_b: 23 # 普通数字引脚
# 启用TB6612的STBY引脚(如有使用)
enable_STBY_pin: 4 # STBY引脚这里需要注意的是,你每次启动小车或者插拔某个USB串口时,这里的port都可能发生变化,这时你就需要根据变化修改这里的port,保证其是arduino开发板的对应串口。
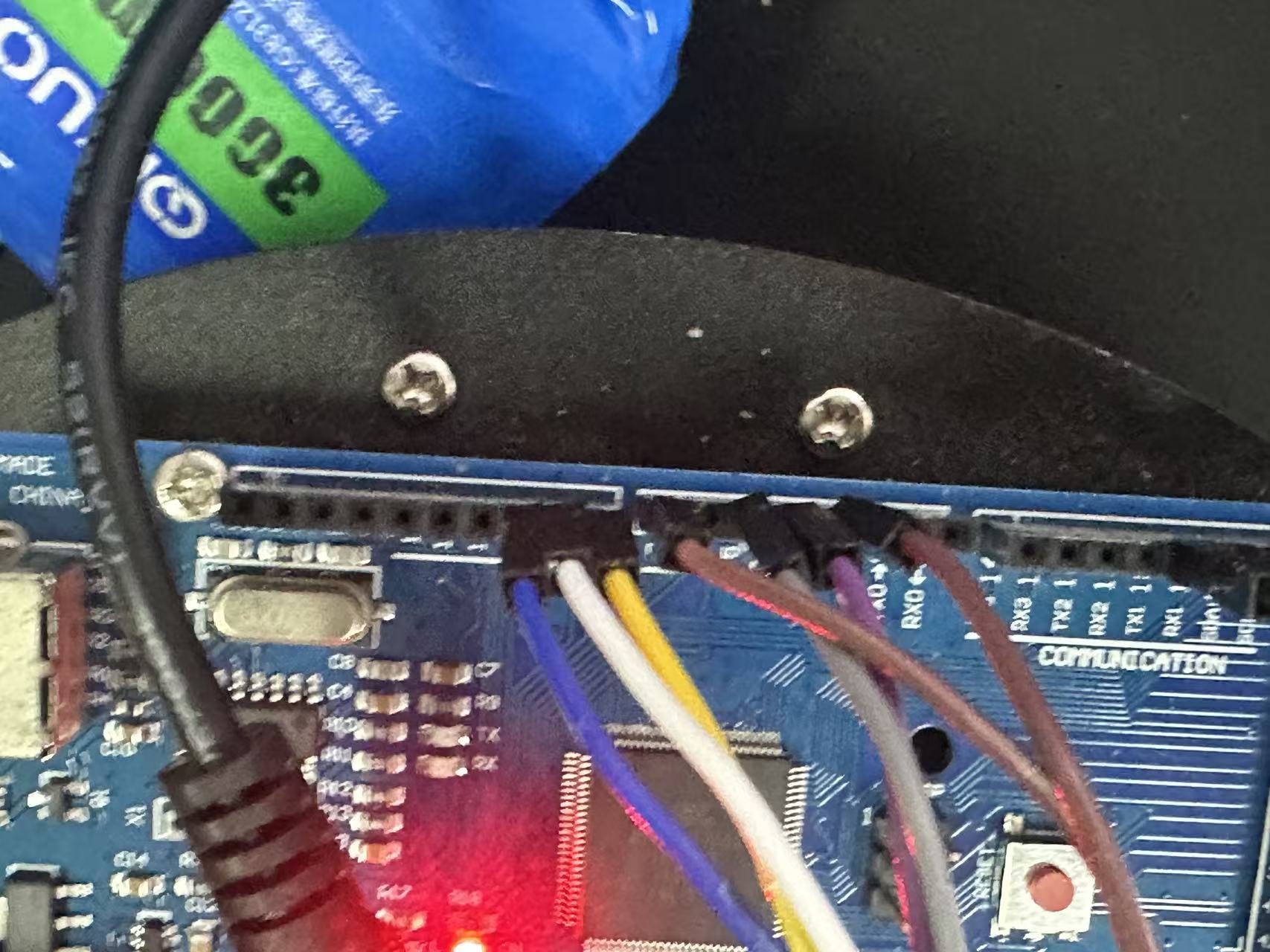
确定arduino开发板对应串口的方法:你可以先打开arduino ide,然后插拔arduino开发板的USB接口,观察下图位置串口的情况,随着你插拔而出现消失的串口即为arduino开发板对应的串口,然后把他填入arduino_params.yaml的port中即可。

(2)修改 ros_arduino_firmware.ino 文件
// 在文件顶部添加TB6612引脚定义
#define MOTOR_LEFT_PWM 5
#define MOTOR_LEFT_IN1 7
#define MOTOR_LEFT_IN2 6
#define MOTOR_RIGHT_PWM 10
#define MOTOR_RIGHT_IN1 9
#define MOTOR_RIGHT_IN2 8
#define STBY_PIN 4 // 如果使用STBY引脚
// 编码器引脚
#define LEFT_ENC_PIN_A 2 // 中断0
#define LEFT_ENC_PIN_B 22
#define RIGHT_ENC_PIN_A 3 // 中断1
#define RIGHT_ENC_PIN_B 23(3)修改 motor_driver.cpp 文件
// 修改 setMotorSpeed() 函数以支持TB6612
void setMotorSpeed(int i, int sp) {
if (sp > MAX_PWM) sp = MAX_PWM;
if (sp < -MAX_PWM) sp = -MAX_PWM;
if (i == LEFT) {
if (sp > 0) {
// 正转
digitalWrite(MOTOR_LEFT_IN1, HIGH);
digitalWrite(MOTOR_LEFT_IN2, LOW);
analogWrite(MOTOR_LEFT_PWM, sp);
} else if (sp < 0) {
// 反转
digitalWrite(MOTOR_LEFT_IN1, LOW);
digitalWrite(MOTOR_LEFT_IN2, HIGH);
analogWrite(MOTOR_LEFT_PWM, -sp);
} else {
// 停止
digitalWrite(MOTOR_LEFT_IN1, LOW);
digitalWrite(MOTOR_LEFT_IN2, LOW);
analogWrite(MOTOR_LEFT_PWM, 0);
}
} else {
// 右电机同理
if (sp > 0) {
digitalWrite(MOTOR_RIGHT_IN1, HIGH);
digitalWrite(MOTOR_RIGHT_IN2, LOW);
analogWrite(MOTOR_RIGHT_PWM, sp);
} else if (sp < 0) {
digitalWrite(MOTOR_RIGHT_IN1, LOW);
digitalWrite(MOTOR_RIGHT_IN2, HIGH);
analogWrite(MOTOR_RIGHT_PWM, -sp);
} else {
digitalWrite(MOTOR_RIGHT_IN1, LOW);
digitalWrite(MOTOR_RIGHT_IN2, LOW);
analogWrite(MOTOR_RIGHT_PWM, 0);
}
}
}
// 添加TB6612初始化函数
void initTB6612() {
pinMode(MOTOR_LEFT_IN1, OUTPUT);
pinMode(MOTOR_LEFT_IN2, OUTPUT);
pinMode(MOTOR_LEFT_PWM, OUTPUT);
pinMode(MOTOR_RIGHT_IN1, OUTPUT);
pinMode(MOTOR_RIGHT_IN2, OUTPUT);
pinMode(MOTOR_RIGHT_PWM, OUTPUT);
// 如果使用STBY引脚
#ifdef STBY_PIN
pinMode(STBY_PIN, OUTPUT);
digitalWrite(STBY_PIN, HIGH); // 使能电机驱动
#endif
}(4)修改 encoder_driver.cpp 文件
// 针对Mega 2560的中断引脚修改
void initEncoders() {
// 左编码器 - 使用外部中断0
pinMode(LEFT_ENC_PIN_A, INPUT_PULLUP);
pinMode(LEFT_ENC_PIN_B, INPUT_PULLUP);
attachInterrupt(digitalPinToInterrupt(LEFT_ENC_PIN_A), leftEncoderISR, CHANGE);
// 右编码器 - 使用外部中断1
pinMode(RIGHT_ENC_PIN_A, INPUT_PULLUP);
pinMode(RIGHT_ENC_PIN_B, INPUT_PULLUP);
attachInterrupt(digitalPinToInterrupt(RIGHT_ENC_PIN_A), rightEncoderISR, CHANGE);
}
// 修改中断服务函数以提高精度
void leftEncoderISR() {
int val = digitalRead(LEFT_ENC_PIN_B);
if (val == LOW) {
if (digitalRead(LEFT_ENC_PIN_A) == HIGH) {
left_encoder_count--;
} else {
left_encoder_count++;
}
} else {
if (digitalRead(LEFT_ENC_PIN_A) == HIGH) {
left_encoder_count++;
} else {
left_encoder_count--;
}
}
}
void rightEncoderISR() {
int val = digitalRead(RIGHT_ENC_PIN_B);
if (val == LOW) {
if (digitalRead(RIGHT_ENC_PIN_A) == HIGH) {
right_encoder_count--;
} else {
right_encoder_count++;
}
} else {
if (digitalRead(RIGHT_ENC_PIN_A) == HIGH) {
right_encoder_count++;
} else {
right_encoder_count--;
}
}
}(5)修改 diff_controller.cpp 文件
// 更新PID控制参数
void updatePID() {
unsigned long time = millis();
unsigned long dt = time - lastUpdateTime;
if (dt == 0) return;
// 计算左右轮的目标速度(转/秒)
float target_left = (goal_vx - goal_vy * wheel_track / 2.0) / (wheel_diameter * PI);
float target_right = (goal_vx + goal_vy * wheel_track / 2.0) / (wheel_diameter * PI);
// 转换为编码器脉冲/毫秒
target_left = (target_left * encoder_resolution) / 1000.0;
target_right = (target_right * encoder_resolution) / 1000.0;
// 获取实际速度(脉冲数/毫秒)
float actual_left = (left_encoder_count - left_encoder_prev_count) / dt;
float actual_right = (right_encoder_count - right_encoder_prev_count) / dt;
// PID计算
float error_left = target_left - actual_left;
float error_right = target_right - actual_right;
integral_left += error_left * dt;
integral_right += error_right * dt;
float derivative_left = (error_left - last_error_left) / dt;
float derivative_right = (error_right - last_error_right) / dt;
// 计算PWM输出
int pwm_left = Kp * error_left + Ki * integral_left + Kd * derivative_left;
int pwm_right = Kp * error_right + Ki * integral_right + Kd * derivative_right;
// 限制PWM值
pwm_left = constrain(pwm_left, -max_pwm, max_pwm);
pwm_right = constrain(pwm_right, -max_pwm, max_pwm);
// 应用方向设置
pwm_left *= motor_left_dir;
pwm_right *= motor_right_dir;
// 设置电机速度
setMotorSpeed(LEFT, pwm_left);
setMotorSpeed(RIGHT, pwm_right);
// 更新变量
last_error_left = error_left;
last_error_right = error_right;
left_encoder_prev_count = left_encoder_count;
right_encoder_prev_count = right_encoder_count;
lastUpdateTime = time;
}2、在搭建电脑与树莓派的分布式框架时,可能会出现只能单向通信,即只能电脑ping通树莓派,树莓派却ping不通电脑,或者反过来的情况,这种情况笔者之前总结过,可以参考如下文章。
关于ROS分布式通信(多机通讯)中,只能单向通信问题的解决。_ros多机通信 防火墙-CSDN博客
3、在接线时,arduino mega 2560和TB6612的正负极一定要注意连接正确,千万不要马虎接反了:TB6612的正极接mega 2560的VIN,TB6612的负极接mega 2560的GND。笔者就是因为正负极接反了烧了一个开发板,导致项目延后了两三天。。。所以正负极这部分,最好每次启动前都检查一下。
接线参考链接:

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 19
19 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)