基于PLC工业机器人视觉定位及自动码垛系统的设计
摘要:本文研究了基于RobotStudio的码垛机器人自动化系统设计。系统采用ABB IRB120机械臂和西门子S7-1200 PLC构建,包含垂直/倾斜存放区及工件堆放区等功能模块。研究重点包括:1)PLC控制系统的硬件设计,完成了I/O设备选型、地址分配和外部接线;2)RobotStudio仿真平台搭建,实现了Smart组件设计和I/O信号配置;3)RAPID程序开发,包含运动控制、逻辑判断等
目前我国的大多码垛机器人大部分为直角坐标型和关节型。直角坐标型机器人位置精度高、控制无耦合。关节机器人与直角坐标型机器人相比拥有本体轻巧、工作范围大等优点。虽然我国在码垛机器人技术领域取得了较大的成就,但是目前还处于发展阶段,《中国制造2025》定下的目标仍没有实现,仍需要众多科研工作者坚持不懈地去攻破难关,研发出更加智能化、高效化的码垛机器人。同时,还要面临国际上其他国家的竞争,所以中国码垛机器人的前途是充满坎坷的,但未来趋势是十分乐观的。
1.3本课题研究内容
应用RobotStudio开发了一种用于处理自动化作业的自动化堆叠工位。本系统使用ABBIRB120和S7-1200系列工业机械臂,,4个位置的材料垂直存放区,4个位置的倾斜存放区,1个较大的工件堆放区。。PLC,4个位置的材料垂直存放区,4个位置的倾斜存放区,1个较大的工件堆放区。
(1)编程简单,使用方便
在PLC的编程语言中,梯形图语言通俗易懂,使用最多,它具有与继电器电路原理图相似的电路符号和表达方式,容易掌握,并能熟练编制简单的用户程序。
(2)可靠性高
PLC控制的软件替代了中继、中继、时序等的逻辑控制器,从而降低了接触头和接线板的使用。减少由于触头触头失效的几率,提髙了系统的可靠性,加强了抗干扰能力。 (3)系统的开发(设计、安装、调试)工作量少,周期短
PLC采用编程方式进行控制,降低了设计的麻烦;通过计算机模拟,调试,修改该方案可以降低现场的调试工作。在现场的调试过程中,如果出现问题,通常仅对使用者的软件进行更改。或者稍微进行局部调整即可。
(4)硬件配套齐全,使用方便,适应性强
PLC已趋于系列化、模块化、标准化,配备了齐全的硬件装置,其编程语言和编程方法多种多样,使用极其方便。当硬件确定后,一般只需改变软件程序内容或者局部调整外围电路,就可以进行功能扩展来满足不同控制系统的需要,用户没有必要重新设计PLC的硬件设备,具有很强的适应能力。
(5)维修方便
PLC的失效几率极低,具有很好的故障检测能力,具有各种不同的故障检测与展示方式,可以很轻松的找出故障源,快速地将故障切除或者是更换新的元件。
(6)体积小、重量轻、能耗低
PLC控制系统没有继电器、定时器、计数器等功能部件,采用软件完成逻辑控制和控制,而且由于其体积较小,重量较轻,因此可以减少控制系统的能耗。
(7)功能强,性价比高
常规的中继控制系统中,对中继设备要求较高;只有像计数装置这样的功能部件,可以完成它的逻辑控制。PLC既可以实现数字量和模拟量的控制,又可以实现智能控制,机器人控制,闭环控制,运动控制等。
(8)通讯功能强、运行效率高
西门子S7-1200型号的PLC配备了很好的通讯能力,比如PROFIBUS-DP通讯;点对点通信,工业以太网通信、OPC通信、无线局域网通信、广域网通信等。正是这些通信功能与现场总线技术和互联网的不断结合,才提高了码垛机器人控制系统的运行效率。
2 搭建仿真平台
在完成虚拟模拟前,必须对其工作条件进行描绘。该工艺要求有一个基础的工作环境;一种机械的躯干。在这些项目中,我们利用SolidWorks的工作场所,材料和设备以同样的比率在本地的试验室里进行绘图,机器人角色可以在RobotStudio中绘制或导出。
2.1底座的建立
(1)ABBRobotStudio作为两个基座,以更好地仿真实际的工作环境。单机“建模”选项卡,选择“固体”中的“矩形体”。如图2.1所示。
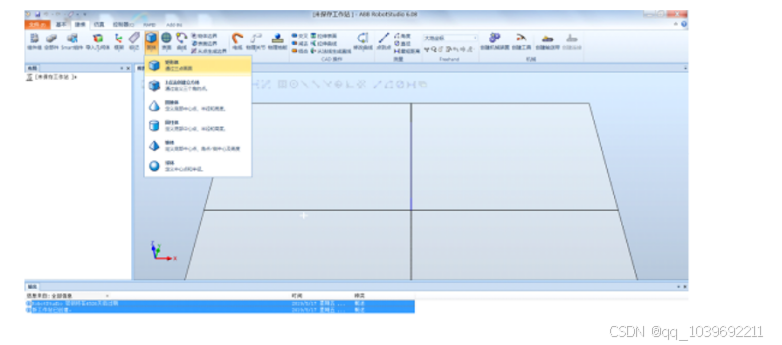
图2.1 建立底座
3 仿真系统设计
3.1仿真和离线编程的流程图
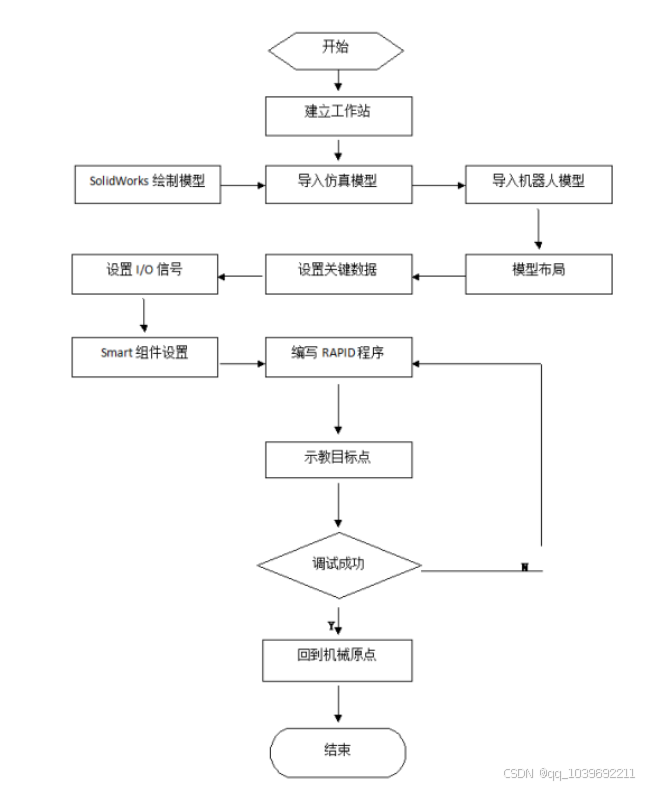
图3.1 RobotStudio虚拟仿真和离线编程的基本流程图
3.2Smart组件设计
(1)新建Smart组件并添加LogicGate,Attacher,LineSensor和Detacher四个组件,如图3.2所示:

图3.2添加完组件的Smart组件
(2)将属性与连结按图3.3所示设定:
(3)
图3.3 属性与连结设定
3.3仿真运行I/O信号
(1)将I/O信号与连接按图3.4所示设定:
图3.4 I/O信号与连接设定
4 PLC控制系统硬件设计
4.1确定I/O设备及I/O信号
首先先确定I/O信号,然后选择PLC。首先要依据码垛机器人工作原理、流程和所要完成的功能,判断输入与输出的外围设备。输入信号主要包括:工作方式选择需要手动、回原点、单步、单周期、连续共5个开关按钮组成;限位开关共需要Z轴上限位、Z轴的上下限位、X轴的左右限位、Y轴的后移限位、中间位置限位、手抓旋转定位检测开关8个限位按钮;码垛机器人运动需要Z轴的上升和下降、X轴的左摆和右摆、Y轴的前移和后移、手抓抓紧和放松8个按钮来控制。另外还有停止按钮、起动按钮、紧急停车按钮,共计24个输出信号。输出信号包括:X轴左右旋转电磁阀、Z轴上升下降电磁阀、Y轴前移后移电磁阀、手抓抓紧电磁阀、手抓旋转电磁阀共8个电磁阀来控制运动过程;指示灯有9个分别为:电源指示灯、X轴左右旋转指示灯、Z轴上升下降指示灯、Y轴前移后移指示灯、手抓旋转手抓抓紧指示灯。共计17个输出信号。
4.2PLC选型
PLC是整个控制系统的核心部分,PLC机型,不光要满足控制功能的需求,也要保证可靠的性能、安全性能以及性能性价比。
(1)S7-1200系列
S7-31XC紧凑型PLC功能强大指令丰富,支持多种通信协议。如图4.1所示是S7-1200型号的PLC。
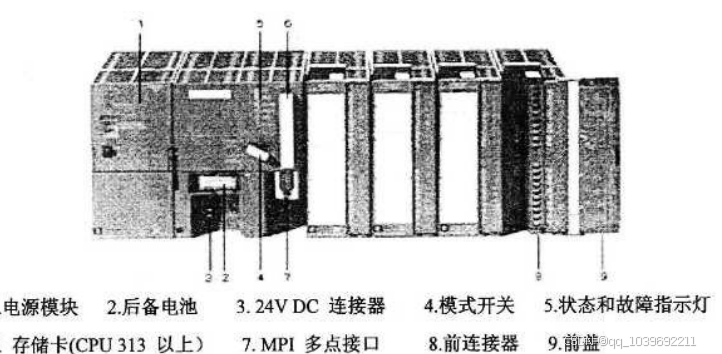
图4.1 S7-1200型号的PLC
(2)确定I/O点数
一般,I/O信号与I/O点数是一对一的PLC输入输出信道根据其机型而定,根据PLC的型号,I/O通道的范围也是不一样的。从上面的数据可以看到,这个控制系统总共有24个按键,而这个按键的输出是17个。另外,对应的位存储器(M)信号也被设定,大概需要15个位存储器信号。该系统共计24个输入量,大约需要32个输出量。在确定I/O点数时,根据输入输出点数来确定控制系统,一般要预留10%~15%的备用量。
(3)确定PLC存储容量
不同的用户所编写的程序一般不会相同,并且不同的程序所占有的内存容量也不会相同,用户程序所占内存容量,除了与I/O点数和程序结构有关之外,还与运算处理量和控制要求等许多因素有关。通常情况下,在确定PLC的存储容量时,往往考虑留有10阳_15%的备用裕量。因此,存储容量的精确计算是很难的,一般都是通过粗略的估算来大致上确定。存储容量=。1x10+DOx100(4.1)其中:DI为数字量的I/O点数DO为模拟量的I/O通道数。
(4)电源模块
在选用电源模块时,一般仅需对其进行功率控制。PLC采用直流24V、直流5V的稳定电亚,其输出端的电压通常是交流220V。额定的电流必须比处理器中的功耗之和要高。本控制系统所采用的电源名称PS3075A,负载电流交流电压、电源为120/230VAC:24VDC/5A。综上所述,本文选择了西门子S7-1200系列314C-2DP的紧凑型型PLC。
4.3I/O地址分配
I/O的地址分配是PLC控制的基本和前提,在绘制好PLC的电路板和编制电路板前,应先明确输入与输出的位置。I/O地址由三部分构成:地址标识符,位部分,地址字节部分。在地址示符中,输入由I代表,输出由Q代表,位储存器间用M表示。
4.4外部接线设计
在PLC选型和I/O地址分配完成之后,按照PLC的原理进行PLC外接电线的设计。PLC的外接线主要包括电源、接地、输入和输出。
(1)电源
PLC的输入端采用直流电源,其电压一般是24V或5V,而输出端则采用交流电源,其电压为220V。
(2)接地
一般情况下,由于各种因素的限制,PLC可以不用电连接。而在PLC的实际控制系统中,为了提高系统的可靠性,应尽可能采用PLC的接地方式,抑制干扰源的干扰。
(3)输入端
在PLC的输如电路中,可以采用常开或常闭触点,但应尽可能采用常开出点。在外接输入线路的设计中,通常采用触点串联或并行组成的线路,以降低I/O的输出点数。
(4)输出端
在PLC的输出电路中,采用与之配套的硬件互锁电路,才能确保PLC的安全工作。另外,在PLC以外,还有一个急停电路,当出现突发事件或危及人员生命的时候,通过设定的紧急停车装置,及时切断事故,将造成的损害降到最低。图4.2显示了PLC的外接线。
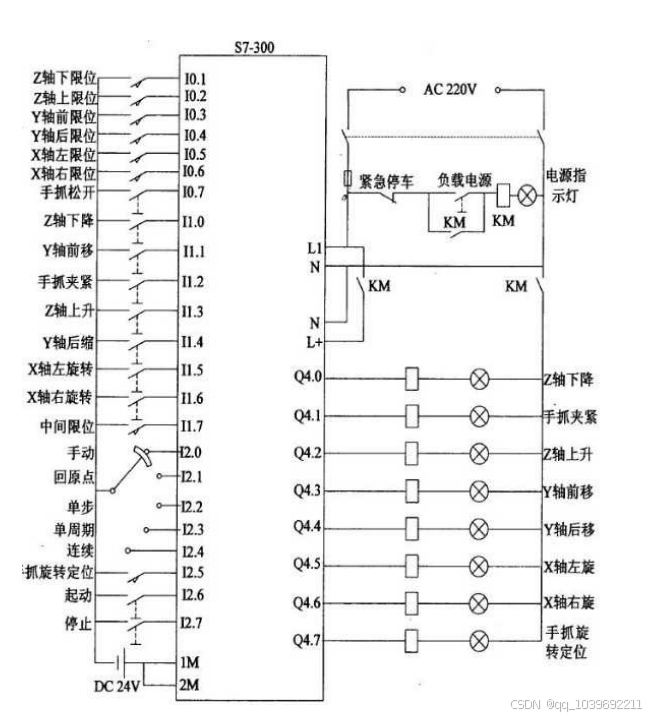
图4.2 PLC的外部接线图
5 系统编程与仿真
本章介绍了示教器的编程和程序的分析。只要程序正确,就可以进行虚拟模拟,并在这章中给出模拟的结论。
5.1码垛搬运工作站需要用到基础的语言
(1)线性运动指令———MoveL
(2)偏移指令—————Offs
(3)重复执行判断指令—FOR
(4)停顿等待—————WaitTime
(5)赋值指令—————:=
(6)程序调用指令———PROC
(7)数字信号置位指令—Set
(8)数字信号复位指令—Reset
(9)变量判断逻辑指令—TEST
5.2RAPID程序编辑
(1)打开虚拟示教器,调成手动模式并且上电,如图5.1所示。
图5.1 更改操作模式
(2)打开程序编辑器新建例行程序,如图5.2所示。

图5.2 新建例行程序
(3)建立一个目标点位于程序数据-robtarget中,如图5.3所示。
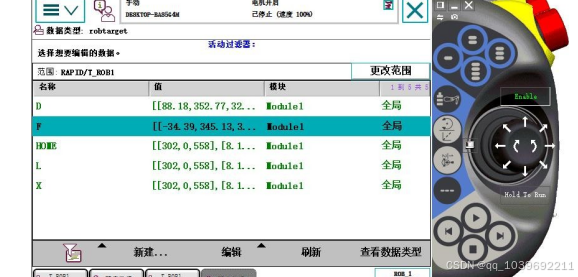
图5.3 新建目标点位
结论
通过这段时间对设计,完成了一下几项工作:
(1)了解了ABB机器人的工作原理,并很成功很熟练的进行了实际操作
(2)学习如何使用RobotStudio,并对机器人搬运码垛进行了虚拟仿真。
这时,在对该问题进行虚拟仿真和布置的时候,出现了很多问题。在模型制作期间,我对物体进行了测量,结果发现尺寸不对。不过,在这个进程中,Solidworks模式可以更好更有效的整合。在Robotstudio的实现中,对其使用并不熟悉。将不得不更改甚至重复,这在虚拟模拟控制和放置板的过程中浪费了大量时间,还会出现实用程序的吸盘无法捕捉模块化材料的情况。利用PLC作为码垛机器人的控制装置,可以把物料或零件从自动流水线上转移到指定的位置,并进行码垛。PLC的控制器自适应能力很强,只要修改程序即可实现对各种目标的控制。但经过多次尝试,模拟最终会成功。所以,以后的工作,即使再难,你也要努力回去认真的检察,认真的学习,这样的工作就会更加的顺畅。如今,一个民族的发展与教育的发展密不可分,全国各地的高校都有了类似的仿真教育平台,可以同学们更好的了解这些机器人的工作方式,让他们能够亲身经历这些事情,从而提高他们的学习能力与兴趣。现在,许多的高校都没有这样的仿真平台,因此这条路还很长。这就需要我们为之努力付出。
文章底部可以获取博主的联系方式,获取源码、查看详细的视频演示,或者了解其他版本的信息。
所有项目都经过了严格的测试和完善。对于本系统,我们提供全方位的支持,包括修改时间和标题,以及完整的安装、部署、运行和调试服务,确保系统能在你的电脑上顺利运行。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 30
30 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)