探索MATLAB下Stewart并联平台仿真的奇妙之旅
MATLAB并联机器人Stewart并联平台仿真s运动学逆解并联机器人运动学、动力学、算法、三维仿真Matlab Simulink simscape仿真自建仿真在机器人领域,并联机器人以其独特的结构和性能优势,吸引着众多研究者的目光。Stewart并联平台作为一种典型的并联机器人,在运动控制、精密定位等方面有着广泛应用。今天,咱就来唠唠如何在MATLAB环境下对Stewart并联平台进行全方位的仿
MATLAB并联机器人Stewart并联平台仿真s运动学逆解并联机器人运动学、动力学、算法、三维仿真Matlab Simulink simscape仿真自建仿真
在机器人领域,并联机器人以其独特的结构和性能优势,吸引着众多研究者的目光。Stewart并联平台作为一种典型的并联机器人,在运动控制、精密定位等方面有着广泛应用。今天,咱就来唠唠如何在MATLAB环境下对Stewart并联平台进行全方位的仿真,从运动学逆解到动力学分析,再到酷炫的三维仿真。
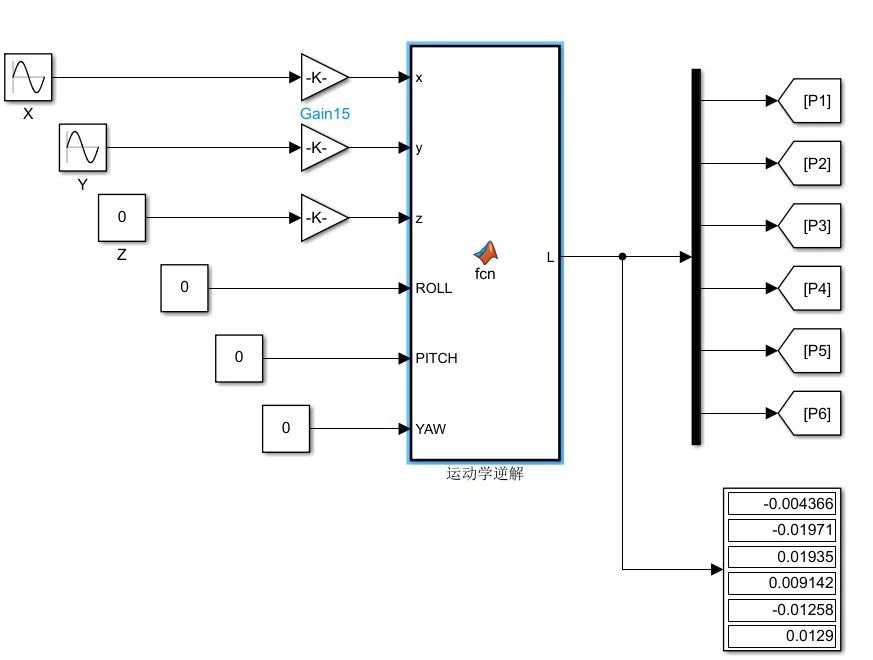
运动学逆解
运动学逆解是并联机器人研究中的关键环节。它旨在根据末端执行器期望的位置和姿态,求解出各个驱动关节的位移。在MATLAB里,我们可以通过建立合适的数学模型来实现这个目标。
假设Stewart并联平台的结构参数已经确定,以下是一段简单示意性的Matlab代码来求解运动学逆解(实际情况要复杂得多,这里仅为示意):
% 定义平台结构参数
l1 = 1; % 动平台到球铰的连杆长度
l2 = 2; % 静平台到球铰的连杆长度
% 末端执行器期望位置和姿态(示例值)
x = 0.5;
y = 0.3;
z = 1.2;
roll = 0;
pitch = 0;
yaw = 0;
% 建立齐次变换矩阵
T = trotz(yaw) * troty(pitch) * trotz(roll);
T(1,4) = x;
T(2,4) = y;
T(3,4) = z;
% 求解各关节长度
for i = 1:6
% 这里通过几何关系和矩阵运算求解关节长度,具体公式根据平台结构确定
Li = calculateLinkLength(T, i, l1, l2);
disp(['关节', num2str(i), '的长度为:', num2str(Li)]);
end在这段代码中,首先定义了平台的一些关键结构参数,这就好比给我们搭建的舞台确定了尺寸。然后设定了末端执行器期望的位置和姿态,就像告诉机器人要去到哪里,以什么样的姿势到达。接着通过齐次变换矩阵来描述末端执行器在空间中的位姿,这个矩阵包含了位置和姿态信息,是连接末端执行器和关节空间的桥梁。最后通过循环计算每个关节的长度,这里calculateLinkLength函数就是根据平台具体的几何结构来计算关节长度的核心部分,实际应用中需要根据具体的平台结构仔细推导这个函数里的公式。
动力学分析
了解了运动学逆解,接下来看看动力学。动力学分析可以帮助我们了解机器人在运动过程中的力和力矩情况,这对于优化机器人的控制算法和性能至关重要。
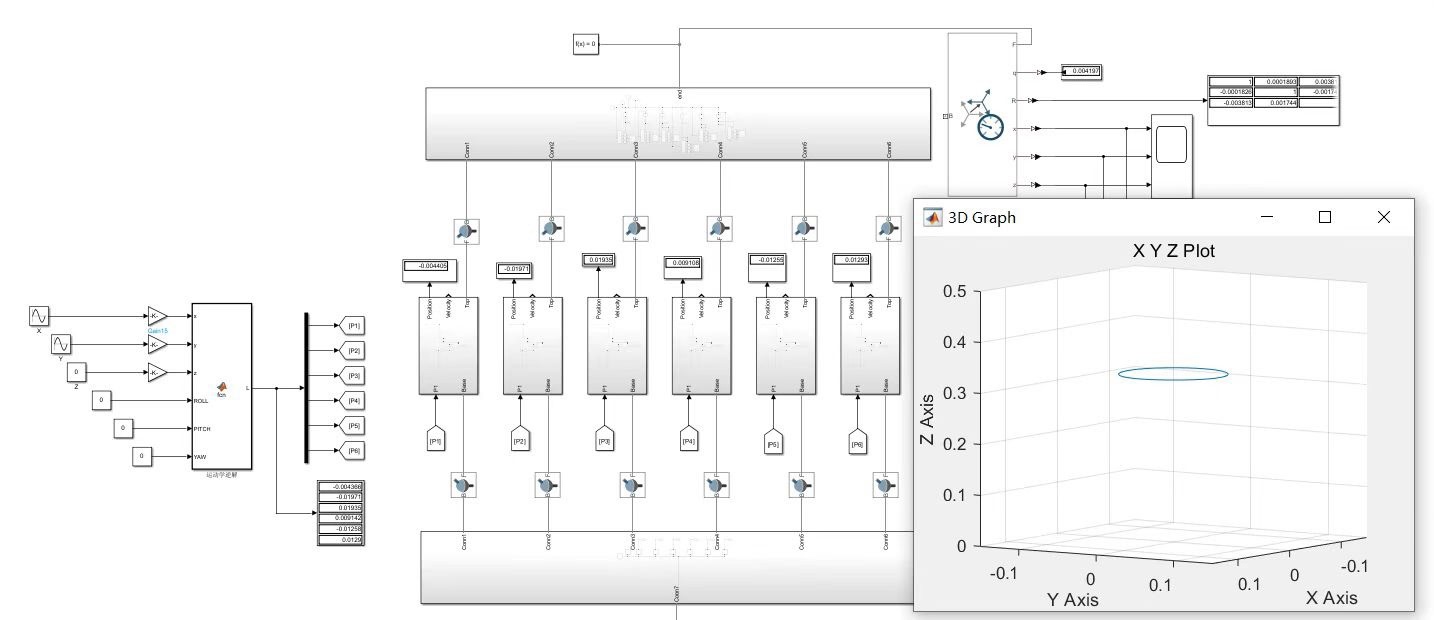
在MATLAB中,我们可以借助Simscape多物理场建模工具来进行动力学分析。首先,在Simulink中搭建Stewart并联平台的模型。我们可以从Simscape库中选择合适的刚体、关节和约束模块来构建平台结构。比如,用Rigid Body模块来代表动平台和静平台,通过Spherical Joint模块来模拟球铰关节。
% 动力学建模示例代码片段
% 创建Simscape模型
mdl = 'Stewart_Platform_Dynamics';
new_system(mdl);
open_system(mdl);
% 添加刚体模块
add_block('simscape/Rigid Body', [mdl, '/MovingPlatform']);
add_block('simscape/Rigid Body', [mdl, '/FixedPlatform']);
% 添加关节模块
add_block('simscape/Spherical Joint', [mdl, '/Joint1']);
% 类似地添加其他关节模块
% 连接模块,构建完整结构
% 通过适当的信号线连接刚体和关节模块,建立运动学和动力学约束关系在这段代码里,先创建了一个新的Simscape模型,就像我们要打造一个新的虚拟实验室。然后添加了代表动平台和静平台的刚体模块,以及代表球铰关节的模块。最后通过信号线连接这些模块,就像用真实的连杆把各个部件连接起来,从而建立起运动学和动力学的约束关系,这样就初步搭建好了用于动力学分析的模型。接下来就可以在这个模型基础上施加各种力和力矩,模拟不同工况下机器人的动力学响应。
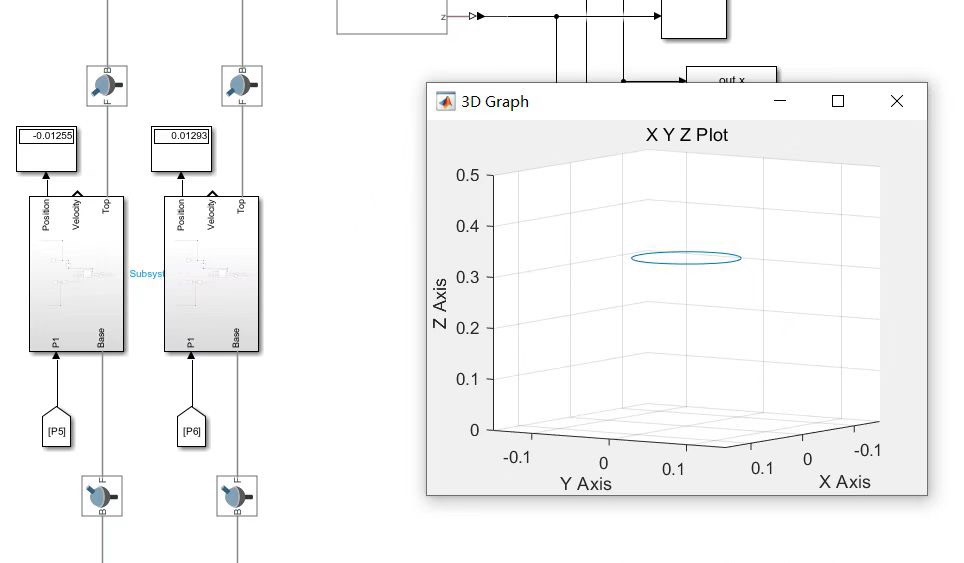
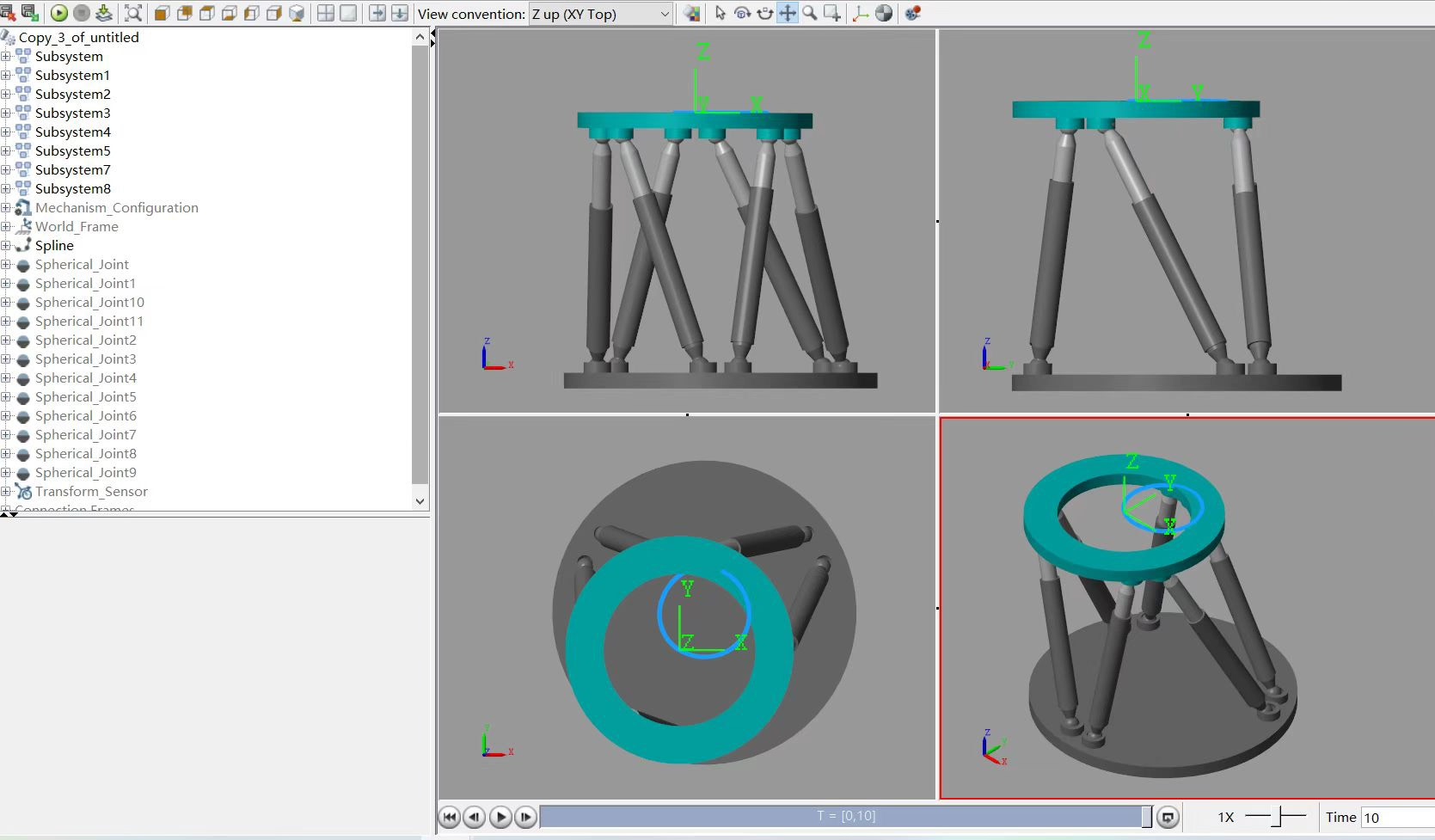
三维仿真
有了运动学和动力学基础,是时候来搞一搞酷炫的三维仿真了。通过三维仿真,我们可以直观地看到Stewart并联平台的运动情况,及时发现设计和控制中的问题。
在MATLAB中,我们可以结合Simulink和Simscape来实现三维可视化。利用3D Animation模块,我们可以将之前搭建好的动力学模型与三维模型进行关联。
% 三维仿真关联代码示例
% 在Simulink模型中添加3D Animation模块
add_block('simscape/3D Animation', [mdl, '/3D_Animation']);
% 将模型中的刚体与3D模型中的部件进行映射
% 例如,将MovingPlatform刚体与3D模型中的动平台部件对应
set_param([mdl, '/3D_Animation'], 'Link1', [mdl, '/MovingPlatform']);
set_param([mdl, '/3D_Animation'], 'Link2', [mdl, '/FixedPlatform']);
% 类似地设置其他刚体与3D模型部件的映射上述代码在Simulink模型里添加了3D Animation模块,这个模块就像是我们的虚拟舞台特效师。然后通过设置参数,将之前动力学模型中的刚体与三维模型中的具体部件一一对应起来,这样当我们运行仿真时,就能够在三维视图中看到Stewart并联平台生动地运动起来,如同在真实世界中一样。
通过在MATLAB中对Stewart并联平台进行运动学逆解、动力学分析以及三维仿真,我们可以深入了解并联机器人的工作原理和性能特点,为实际应用中的设计、优化和控制提供有力支持。无论是科研探索还是工程实践,这些方法和技巧都有着极高的价值,希望大家也能在自己的研究和项目中充分发挥它们的作用。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 25
25 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)