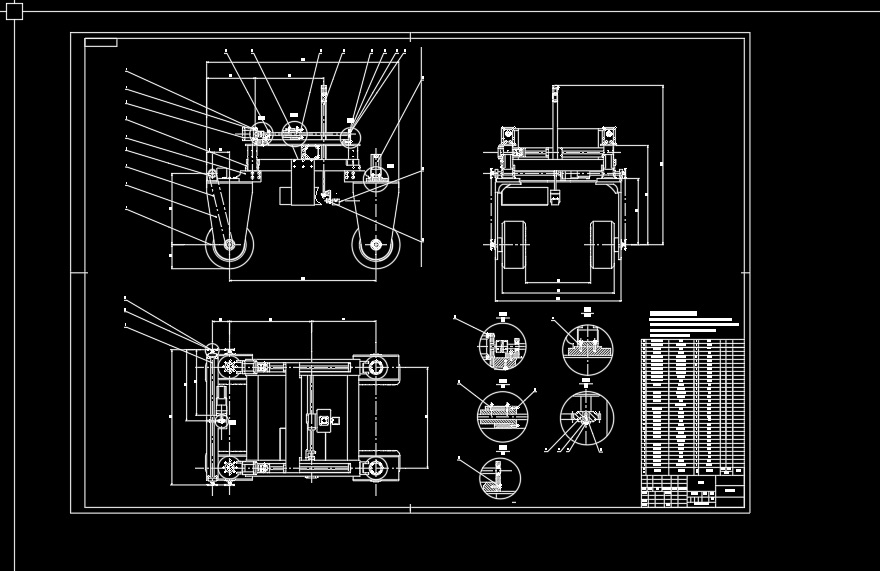
草莓采摘机器人结构设计2张cad+设计说明书+三维图
2022年,山东省的智慧农业项目中,草莓采摘机器人被广泛应用于大棚种植,提升了采摘效率和作业质量,根据市场调研,预计到2024年,草莓采摘机器人将会在技术上进一步升级,性能和效率将得到提升,市场需求也将持续增长[8]。(1)提高生产效率:顾名思义,提升生产效率是所有设备的关键因素,也是各个技术的突破点,草莓采摘机器人能够在短时间内完成大量的采摘工作,将会显著提高生产效率,降低人工成本。(3)提升采
摘要:随着农业现代化的发展,传统的人工采摘方式在草莓等水果采摘中面临着效率低、劳动强度大等问题。草莓采摘机器人结合了机械、传感器技术、计算机视觉和人工智能算法,旨在实现草莓的自动化采摘。该机器人通过精确识别草莓的成熟度和位置,避免了因人为判断误差导致的采摘损失,同时提升了采摘的精度和速度。它可以在一定程度上模仿人类采摘的动作,避免对草莓植株的损害,提高了草莓的收成质量。
草莓采摘机器人的结构设计通常包括移动平台、视觉识别系统、机械臂和抓取装置等关键组成部分。移动平台负责机器人的自主行驶和定位,确保机器人能够覆盖整个果园区域。视觉识别系统则通过高精度摄像头与图像处理技术,检测草莓的位置、大小和成熟度,并将这些信息传递给机器人的控制系统。机械臂则根据视觉系统的反馈,精确地抓取成熟的草莓,并通过柔性抓取装置将其采摘下来,避免对果实的损伤。为了提高采摘效率,机器人还需具备较强的适应能力,能够在不同的果园环境中灵活工作,甚至适应不同品种的草莓。这些设计的结合使草莓采摘机器人在实际应用中具有较高的自动化程度和生产效率,具有广阔的市场前景。
关键词:采摘机器人 结构设计 理论计算 校核 solidworks
摘要: 1
1 绪论 3
1.1 立题依据 3
1.2研究背景及意义 3
1.2.1 研究背景 3
1.3 国内外研究现状 3
1.4未来的发展趋势 6
1.5本文主要研究内容 7
2 草莓采摘机器人的总体方案设计 8
2.1总体的设计要求 8
2.2总体设计思路 8
9
2.3总体设计方案 9
3 采摘机器人的结构设计 11
3.1设计的原始数据 11
3.2行走机构的设计 11
3.3抓取机构的设计 13
3.4机械臂结构设计 14
3.4.1 丝杆螺母副的计算与选型 15
3.4.2 Z轴滚珠丝杠螺母副的计算与选型 15
3.4.3 x轴和y轴滚珠丝杠螺母副的计算与选型 16
4 采摘机器人的三维建模 19
4.1三维建模 19
4.2三维零件图 19
4.3三维装配图 19
5总结和展望 21
5.1 总结 21
5.2 展望 21
参考文献: 23
致谢 25
1 绪论
1.1 立题依据
草莓是我国重要的农作物之一,因其营养丰富和口感甜美而受到广泛欢迎[1]。随着草莓种植面积的扩大,传统的人工采摘方式已无法满足生产需求,导致了劳动成本的增加和采摘效率的降低。因此,研究和开发一种新型草莓采摘机器人,实现草莓采摘的自动化和智能化,具有重要的理论和实践意义[2]。这不仅可以提高工作效率,降低生产成本,还能解放劳动力,促进农业现代化[3]。
1.2研究背景及意义
1.2.1 研究背景
草莓作为一种重要的经济作物,因其营养丰富和口感甜美而受到广泛欢迎[12]。中国已成为全球最大的草莓生产国和出口国,草莓的种植面积和产量逐年增加。然而,草莓的采摘过程是一个劳动密集型的环节,传统的人工采摘方式不仅耗时长、效率低,而且在高峰期常常面临人力不足的问题[13]。这使得研究和开发草莓采摘机器人显得尤为重要。
1.2.2 研究意义
(1)提高生产效率:顾名思义,提升生产效率是所有设备的关键因素,也是各个技术的突破点,草莓采摘机器人能够在短时间内完成大量的采摘工作,将会显著提高生产效率,降低人工成本。
(2)解放劳动力:自动化采摘可以减少对人工的依赖,尤其是在劳动力短缺的情况下,能够有效缓解农民的工作压力[14]。
(3)提升采摘质量:机器人可以通过精确的视觉识别技术,选择成熟的草莓进行采摘,减少因人为因素导致的损伤,提高采摘质量。
(4)推动农业现代化:草莓采摘机器人的研发与应用是农业现代化的重要组成部分,能够促进农业生产方式的转变,推动智能农业的发展。
(5)应对市场需求:随着消费者对新鲜、优质草莓需求的增加,自动化采摘技术的应用能够更好地满足市场需求,提升产品竞争力[15]。
1.3 国内外研究现状
1.3.1 国内研究现状
中国起步草莓采摘机器人在中国的发展历程可以追溯到近年来随着农业自动化和智能化技术的快速发展[4]。经过查阅资料可以知道,在2010年代初是我们早期探索阶段,在2010年代初,中国的农业机器人研究尚处于起步阶段,主要集中在基础的农业机械化上[5]。此时,草莓采摘机器人尚未得到广泛关注。在2015-2018年,在这个时间段是技术研发与试点,随着技术的进步,特别是计算机视觉和机械手臂技术的发展,草莓采摘机器人的研发逐渐受到重视[6]。2015年左右,部分高校和研究机构开始进行草莓采摘机器人的初步研究和试验。到了2019年是产品化与市场应用阶段,到2019年,国内一些企业和研究机构成功研发出原型机,并在部分地区进行试点应用。例如,北京农林科学院研发的草莓采摘机器人能够自主搜索、识别和采摘成熟草莓,显著降低了人工成本并减轻了工作强度[7]。从2020年至今, 进入2020年后,草莓采摘机器人技术逐渐成熟,市场需求不断增加。多个企业开始推出商业化产品,并在全国范围内推广应用。2022年,山东省的智慧农业项目中,草莓采摘机器人被广泛应用于大棚种植,提升了采摘效率和作业质量,根据市场调研,预计到2024年,草莓采摘机器人将会在技术上进一步升级,性能和效率将得到提升,市场需求也将持续增长[8]。这一趋势将推动更多农业生产向智能化、自动化转型。
伴随着草莓采摘技术的不断突破,草莓采摘机器人不仅在硬件上得到了升级,软件方面的创新也促使其更好地适应实际应用需求。例如,人工智能算法的优化使得机器能够更精准地识别不同成熟度的草莓,并在复杂环境中灵活操作。此外,机器视觉和深度学习技术的结合,使得机器人能够在不同光照和环境变化下依然保持较高的采摘精度。近年来,随着农业生产的智能化转型,草莓采摘机器人逐渐成为解决劳动力短缺问题的有效工具,尤其是在劳动力成本上升的背景下,机器人采摘的经济效益愈发显现。与此同时,机器人采摘的普及推动了整个农业产业链的创新,除草、喷灌等其他智能化设备也在不断涌现,提高了农业生产的整体效率。尤其是在一些农业大棚中,草莓采摘机器人不仅提升了采摘效率,还显著降低了作物的损伤率,确保了果品的质量和市场竞争力。随着相关技术的不断成熟,未来草莓采摘机器人可能会逐步应用于更多类型的农作物,推动农业自动化迈向更高水平,进一步加速全球农业智能化的进程。预计在不久的将来,草莓采摘机器人不仅将在国内市场广泛应用,还将出口至其他国家,为全球农业生产带来新的机遇与挑战。
图1.2国内发展现状
1.3.2 国外研究现状
国外对草莓采摘机器人的研究始于20世纪60年代,尤其是美国、日本等发达国家在这一领域的探索较早[9]。1968年,美国学者首次提出将机器人技术应用于果蔬采摘,标志着这一领域的开端。总体来看,国外在草莓采摘机器人领域的研究起步早、技术成熟、应用广泛,国外对草莓采摘机器人的研究不仅起步早,而且技术发展较为成熟。美国、欧洲和日本等发达国家在这一领域的研究与应用已有几十年的历史。20世纪60年代,美国学者首次提出将机器人技术应用于果蔬采摘,并在70



DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 14
14 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)