AGV全覆盖移动避障路径规划:基于Matlab的深度优先搜索与随机碰撞算法代码
本文分析两种扫地机器人全覆盖路径规划算法:基于深度优先搜索(DFS)的系统性规划方法和基于随机碰撞的启发式方法。这两种算法都旨在解决在存在障碍物的栅格地图中,如何让扫地机器人高效遍历所有可达区域的问题。
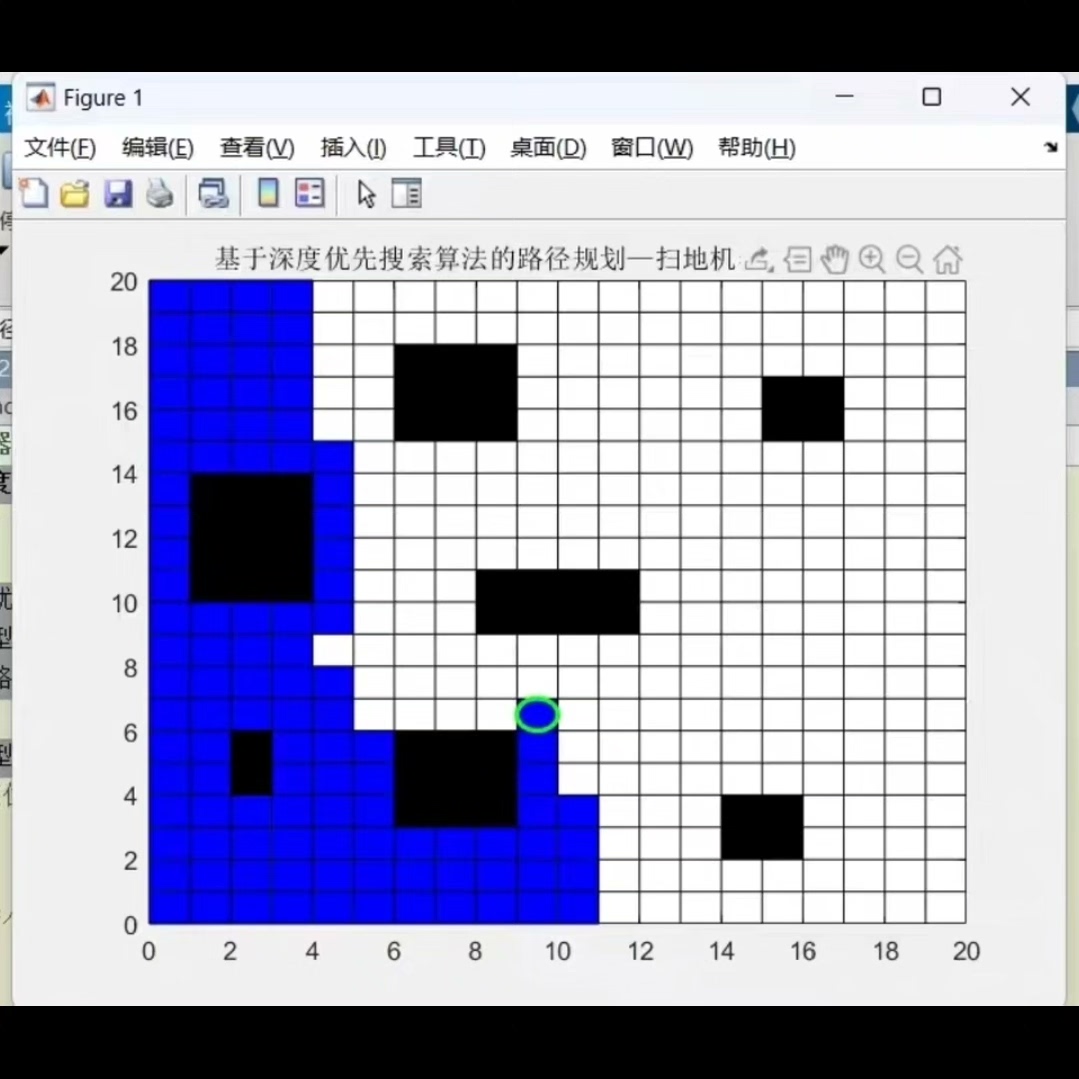
AGV全覆盖移动避障路径规划matlab代码 扫地机器人路径规划 第一类算法 全覆盖智能算法 %% 基于深度优先搜索算法的路径规划—扫地机器人移动仿真 % 返回深度优先搜索实现全覆盖的运行次数 % 将栅格模型的每一个栅格看成一个点 % 实际中栅格模型是连续的,在计算机处理时看作离散的 % 将栅格模型抽象为标识矩阵,矩阵对应位置的标记表示栅格对应位置的状态 第二对比算法 %% 随机碰撞的路径规划—扫地机器人移动仿真 % 返回深度优先搜索实现全覆盖的运行次数 % 将栅格模型的每一个栅格看成一个点 % 实际中栅格模型是连续的,在计算机处理时看作离散的 % 将栅格模型抽象为标识矩阵,矩阵对应位置的标记表示栅格对应位置的状态
算法概述
本文分析两种扫地机器人全覆盖路径规划算法:基于深度优先搜索(DFS)的系统性规划方法和基于随机碰撞的启发式方法。这两种算法都旨在解决在存在障碍物的栅格地图中,如何让扫地机器人高效遍历所有可达区域的问题。
环境建模与地图表示
栅格地图系统
两种算法都采用相同的环境表示方法——栅格地图系统。每个栅格单元的状态用二元标识表示:
- 0值单元:表示可通行的空闲区域
- 1值单元:表示不可通过的障碍物区域
地图数据结构
通过MAP()函数定义机器人的工作环境,该函数返回一个二维矩阵,其中预先定义了障碍物的布局。地图支持旋转操作以适应不同的坐标系统需求。
function map = MAP()
% 定义20x20的栅格地图
MAX0 = [0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
... % 地图具体定义
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0];
map = rot90(MAX0,3); % 坐标系统一处理
end深度优先搜索路径规划算法
算法核心思想
深度优先搜索算法将栅格地图抽象为图结构,每个可通行栅格作为图的一个节点,相邻栅格之间的连通关系作为边。算法通过系统性的图遍历确保访问所有可达节点。
关键技术实现
图结构转换
graph_convert()函数将栅格地图转换为图的压缩表示形式,识别水平方向和垂直方向上相邻的可通行栅格,建立节点间的连接关系。
DFS遍历过程
算法使用栈数据结构实现深度优先遍历:
- 从起始节点(通常为地图左上角)开始遍历
- 优先向未访问的相邻节点扩展
- 当遇到死胡同时回溯到最近的分支点
- 记录完整的遍历路径用于机器人导航
路径优化特性
DFS算法产生的路径具有系统性,避免了随机性带来的效率问题。回溯过程虽然会产生重复路径,但确保了所有区域的完全覆盖。
随机碰撞路径规划算法
算法核心思想
随机碰撞算法模拟现实中扫地机器人的行为模式,机器人不具备全局地图记忆能力,仅根据当前位置和局部感知做出移动决策。
运动策略
机器人采用四方向随机移动策略:
- 向右移动:[1, 0]
- 向上移动:[0, 1]
- 向左移动:[-1, 0]
- 向下移动:[0, -1]
决策机制
在每个时间步,机器人随机选择移动方向,但受到以下约束:
- 不跨越地图边界
- 不穿越障碍物区域
- 优先选择未清扫区域,但允许重复清扫
可视化与性能分析
实时路径显示
两种算法都提供实时的清扫过程可视化:
- 蓝色区域:首次清扫的区域
- 红色区域:重复清扫的区域
- 绿色轨迹:机器人移动路径
- 三角形标记:路径起点
- 圆形标记:路径终点
性能度量
系统计算两种算法的关键性能指标:
- 路径总长度:机器人移动轨迹的欧几里得距离总和
- 步数统计:完成全覆盖所需的移动步数
- 覆盖效率:有效清扫面积与总移动距离的比率
算法对比与应用场景
深度优先搜索算法优势
- 系统性覆盖:确保所有可达区域都被访问
- 路径可预测:算法行为确定,便于分析和优化
- 理论完备性:基于图论,有坚实的数学基础
随机碰撞算法特点
- 实现简单:不需要复杂的数据结构和算法
- 适应性强:对动态环境变化有一定适应性
- 资源需求低:计算和存储需求较小
适用场景建议
- 结构化环境:推荐使用DFS算法,效率更高
- 资源受限系统:可考虑随机碰撞算法
- 混合策略:实际应用中可结合两种算法的优点
技术实现细节
两种算法共享基础模块,包括地图处理、障碍物检测和可视化组件,但核心路径规划逻辑完全不同。DFS算法通过显式的图遍历实现全局优化,而随机算法通过局部决策实现 emergent 的全局行为。
该代码系统为研究扫地机器人路径规划算法提供了完整的实验平台,可用于算法比较、性能评估和教学演示。通过调整地图布局和算法参数,可以进一步探索不同环境条件下的最优路径规划策略。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 12
12 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)