从特斯拉摔倒看六维力传感器:人形机器人自主性的“关键拼图”
特斯拉Optimus机器人摔倒事件引发行业对力觉感知技术短板的关注。视频显示机器人在递送水瓶时因缺乏精准力反馈而摔倒,暴露了末端执行器和关节力传感器的缺失问题。目前国产力控传感器企业正在崛起,如蓝点触控已占据国内主要市场份额。专家指出,未来人形机器人需实现视觉与力觉的多模态融合,通过核心部件优势转化为整机性能,才能真正实现自主智能。这一事件表明,机器人产业需要更加重视"感知-决策-执行&
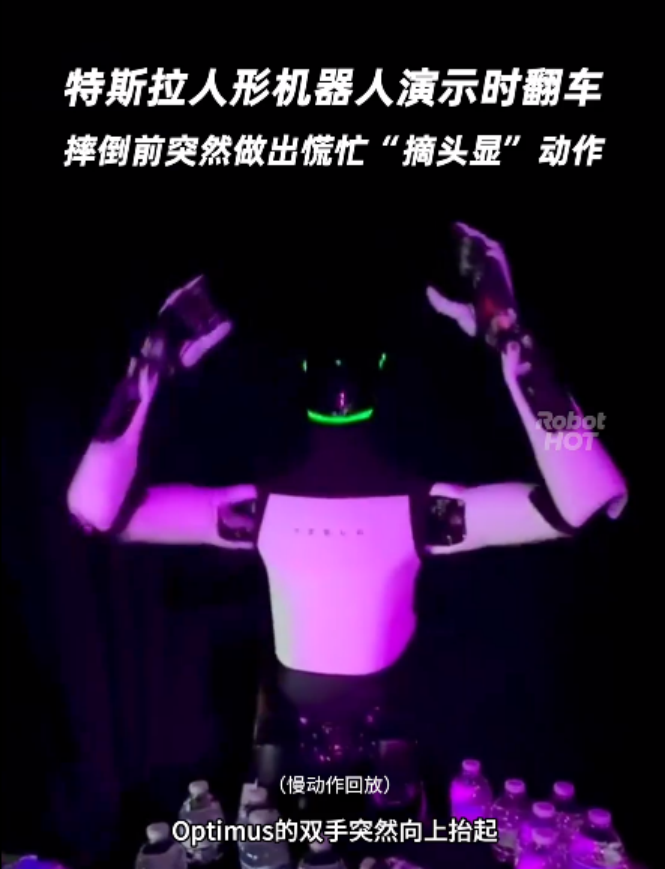
最近,一段特斯拉Optimus(擎天柱)机器人在演示中摔倒的视频,意外地成为了机器人行业一个标志性的事件。在这起事件中,人们关注的焦点并非机器人摔倒本身,而是它倒地前双手做出的一个诡异“抓握”动作——这个动作与远程操作员在紧急情况下慌忙摘下VR头显的姿态如出一辙。这一细节瞬间引爆了对其“纯AI驱动、非远程操控”宣传的广泛质疑。
作为一名长期观察机器人行业的从业者,在我看来,这起事件的真正意义,远不止于一次公关尴尬。它像一面镜子,精准地折射出当前人形机器人产业在迈向真正“自主智能”道路上,一个被低估却至关重要的技术短板:力觉感知。
一、表象与本质:摔倒背后是“触/力觉”的缺失
视频显示,Optimus机器人在递送水瓶时,因动作过快导致水瓶掉落,随后失去平衡向后摔倒。这个看似简单的失误链条,本质上暴露了两个核心问题:
1、环境交互的“鲁莽”:机器人未能根据手中水瓶的重量和重心变化,实时、精细地调整抓握力与手臂姿态。这说明其末端执行器(手部)很可能缺乏精准的力反馈,导致操作僵硬。(ps:但据我了解,他们应该是上了六维力传感器的?)
2、姿态调整的“迟钝”:在失去平衡的瞬间,机器人似乎未能通过足部或关节感知到身体重心的急剧偏移,并及时做出有效的防摔步态调整,而是像一个僵硬的木偶般直挺挺倒下。
3、特斯拉CEO马斯克曾坚称Optimus由AI驱动,非远程操控。但这次事件中的“摘头显”动作,恰恰指向了另一种可能性:在复杂动态环境中,机器人自主决策系统可能“掉线”或“失灵”,被迫切换或暴露了背后的远程操作模式。
无论真相如何,事件都指向一个结论:缺乏高精度的力觉感知和实时力控,机器人就无法像人一样,通过“触/力觉”与环境进行安全、柔顺、可靠的交互,其宣称的“自主性”也就如同空中楼阁。
二、核心痛点:为什么“力传感器”是关键?
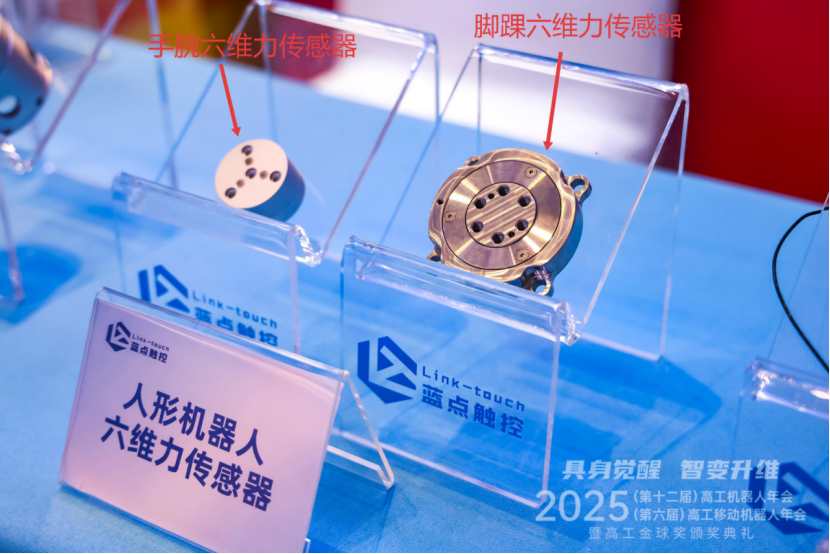
要让机器人拥有真正的“触觉”,离不开两类核心传感器:六维力传感器和关节力(矩)传感器。

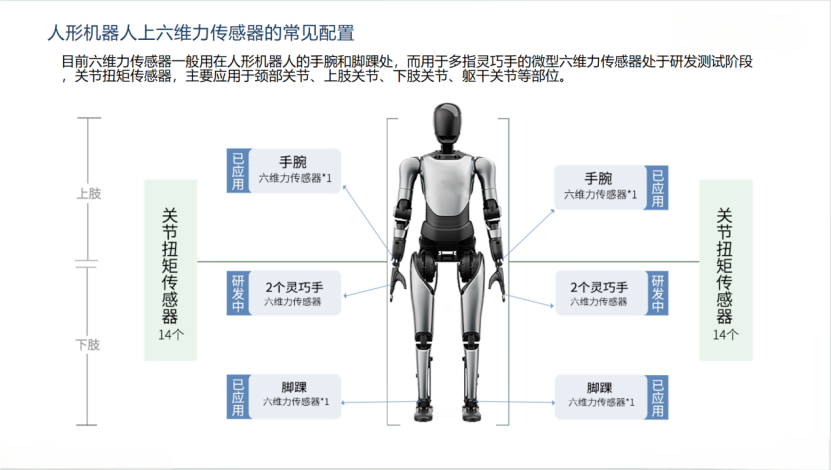
六维力传感器(末端触觉):通常安装在机械臂末端(手腕或脚踝)。它能同时检测三个方向的力(Fx, Fy, Fz)和三个方向的力矩(Mx, My, Mz)。在Optimus的事件中,如果其手腕配备了高性能的六维力传感器,它就能实时感知水瓶掉落瞬间的力变化,并迅速做出抓握力调整,甚至可能在失衡初期就通过手臂的微小摆动来尝试恢复平衡。
关节力传感器(本体感知):安装在各个关节处,用于精确测量关节输出的扭矩。它是实现精准位置和力控制的基础。在机器人摔倒过程中,关节力传感器需要以毫秒级的响应速度,将身体各部位受到的冲击力和姿态误差反馈给中央控制器,从而触发紧急保护程序。

业界普遍认为,一台成熟的人形机器人通常需要配备4个六维力传感器(双手腕、双脚踝)和28个左右的关节力传感器,其成本可占到整机物料成本的15%。这不仅是成本的组成部分,更是性能的决定性因素。
三、产业拐点:国产力控传感器的崛起
长期以来,高端六维力传感器市场被国外企业垄断。但近年来,随着国内人形机器人产业的爆发,一批具备核心技术能力的国产传感器企业快速崛起,正在打破这一格局。
以行业内的代表性企业蓝点触控为例,其发展轨迹颇具代表性。这家成立于2019年的公司,以航天级技术为根基,专注于智能机器人的力控技术。其核心产品六维力传感器与关节力矩传感器,凭借0.1%FS的高精度、10kHz的高频响应等指标,已达到国际顶尖水准。
市场数据更具说服力。截至2025年,蓝点触控的六维力传感器在国内人形机器人市场的份额已超过80%,关节力矩传感器的市占率更是高达95%以上。其客户已覆盖智元、小米、优必选等国内多数头部机器人企业。高工机器人产业研究所(GGII)预测,2025年中国人形机器人六维力传感器出货量将同比激增超过510%,一个百亿级规模的市场正在加速形成。
国产供应链的成熟,不仅降低了成本,更关键的是将需求响应周期压缩至3-4周,极大地加速了机器人厂商的迭代速度。这标志着中国机器人产业在核心零部件环节,正从依赖进口转向自主可控,为整个行业的规模化发展扫清了关键障碍。
四、思考与展望:通往“真智能”的务实之路
特斯拉Optimus的这次“摔倒”,给整个行业敲响了警钟。它提醒我们,人形机器人的智能化,不能仅仅停留在视觉识别和路径规划的“大脑”层面,必须同等重视力觉感知和精细操控的“小脑”与“神经末梢”。
未来的竞争,将是“感知-决策-执行”全链路能力的竞争。纯视觉的方案在复杂、动态的物理交互中已显乏力,力觉与视觉的多模态融合才是必然趋势。
对于中国机器人产业而言,机会与挑战并存。我们已经在力控传感器这一核心环节取得了突破性进展,拥有了像蓝点触控这样能在市场份额和技术上与国际巨头同台竞技的企业。下一步,需要将这种核心部件的优势,转化为整机系统级的性能和体验优势。
行业的健康发展,需要更多务实的态度。正如蓝点触控创始人刘吴月所言,应坚持“有限场景切入、螺旋迭代发展”的路径,不追求“大场景一步到位”,而是通过解决一个个具体的物理交互问题,持续积累真实世界的数据与能力。
只有这样,机器人才能不再需要那个隐藏在幕后的“摘头显”的操作员,真正依靠自身的“触觉”和“智能”,稳稳地站在我们面前。那时,今天这场关于“真假自主”的争论,才会真正成为历史。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 10
10 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)