T-S fuzzy技术在机器人控制中的应用
T-S模糊技术(Takagi-Sugeno模糊模型)是一种基于模糊逻辑的系统建模方法,由日本学者Takagi和Sugeno于1985年提出。该技术通过将非线性系统分解为多个局部线性子系统,并利用模糊规则进行整合,实现对复杂系统的精确建模与控制。T-S模糊技术可以广泛用于非线性机器人系统的线性化建模,以便后续控制器的优化设计。
——机器人动力学系统具有典型非线性特点,利用TS模糊技术可以实现线性化建模
T-S模糊技术(Takagi-Sugeno模糊模型)是一种基于模糊逻辑的系统建模方法,由日本学者Takagi和Sugeno于1985年提出。该技术通过将非线性系统分解为多个局部线性子系统,并利用模糊规则进行整合,实现对复杂系统的精确建模与控制。
一、典型机器人动力学系统
通常用二阶系统表示低速下的机器人动力学行为:
其中,为惯性矩阵,
为粘滞摩擦系数,
为负载质量,
为重力加速度,
为重力加速度至关节转轴的距离,
为关节转角,相应其一阶导
和二阶导
为相应速度和加速度。
为控制器信号,直接作用于关节处(红色)。其受力如图所示:
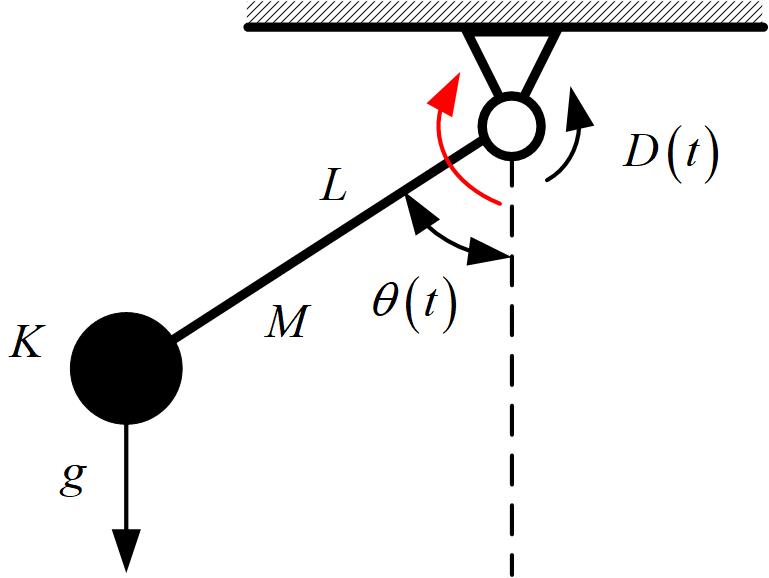
该方程中含有非线性项,无法直接转化为状态空间方程。
例如,可以将上述方程重写为:
令,写成状态空间方程标准形式
,可以得到:
注意到,为粘滞摩擦系数,其为时变量。一般状态空间方程中的系数矩阵
为了后续控制器能够求解,往往希望其为时不变的常数矩阵。通常,工程上如果短时间使用或是使用得当,粘滞摩擦系数往往用常数的名义摩擦系数
代替。
另一个更麻烦且格格不入的项是,它由于含有非线性项
而无法加入状态空间方程
的线性形式中。该项是由于连杆连接两个不同坐标系所带来的,而机器人中不同坐标系(关节)连接又不可避免也极为复杂。这种情况就是我们经常听到“机器人系统具有强非线性”中非线性的由来,这也是我们需要利用T-S模糊技术线性化的首要目标。该例是单关节机器人的动力学,也是最简单的非线性构成,我们从这种简单情况出发讲解机器人是如何用TS模糊技术线性化的。
二、T—S模糊技术线性化
注意到,非线性项是一个三角函数,且由关节转角
决定。对于
,对其线性化本质就是希望将其转化为某种
的形式(其中C为常数)。
首先能想到的,对于转化为
的线性形式,可表达为
其系数函数图像如图所示。
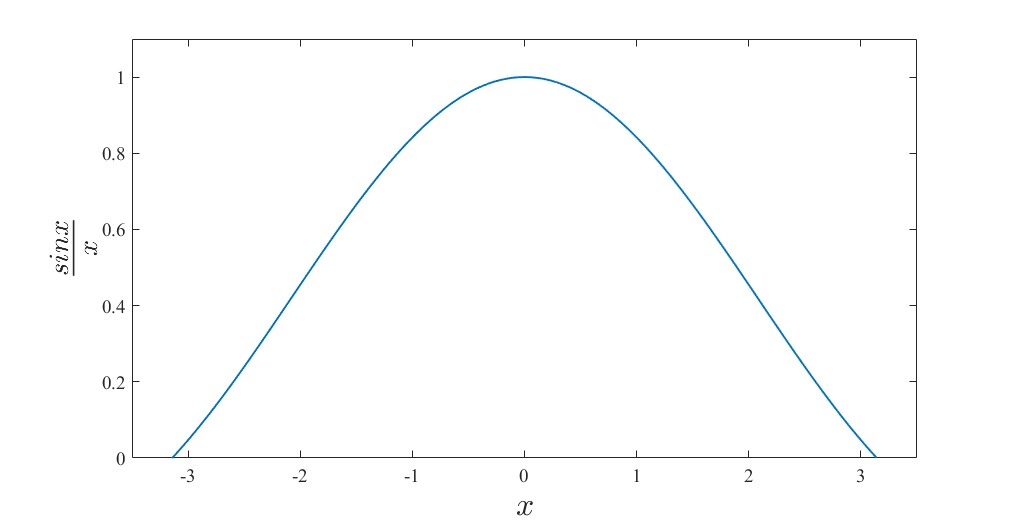
可以看到,只有在x=0附近时,sin(x)与x相近,其比值接近1;越接近,其比值越接近0差异越大。一般在
时(约28.6°)时,近似是合理的。同时需要注意到,泰勒展开也是针对x=0附近进行线性化展开的。
因此,可以判定,
与
无法简单近似。
这里介绍利用TS模糊进行线性化的方法。
观察一下不难发现,属于周期函数,在-1至1之间往复波折。其中,
在0处与
相等,均为0;当其等于
时,
。因此我们可以用三角波浪线进行近似。
该三角波浪线可以用数学公式进行表示:
可以看到,这属于一种“此消彼长”的运动模式。初步可以分为5个工作点,分别是:
| 工作点1 | 工作点2 | 工作点3 | 工作点4 | 工作点5 |
我们希望其在工作点处可以线性化,满足的形式。因此,我们需要对其求得斜率
和偏置
。
通过对sin函数在工作点处泰勒展开,可以得到:
,
。
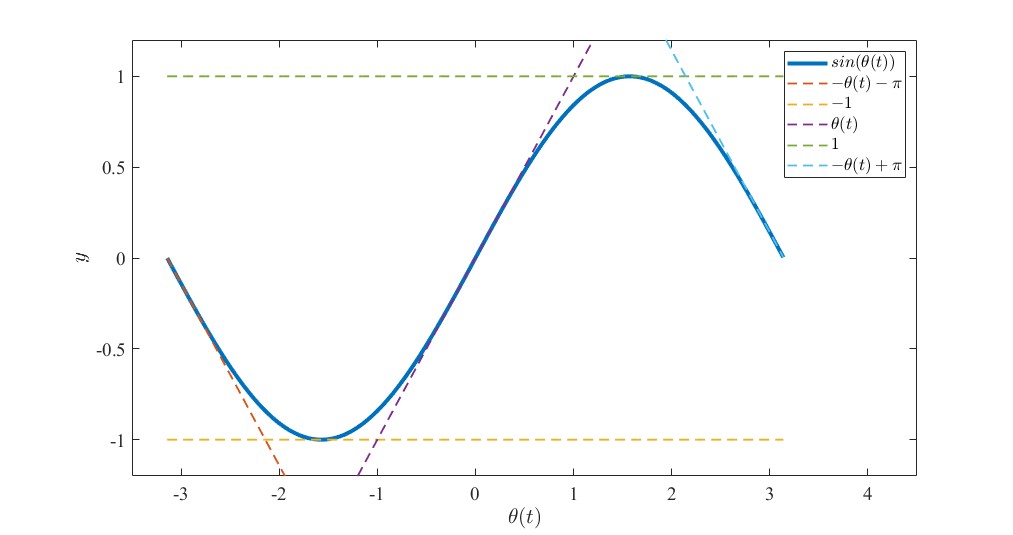
将5个工作点处的值分别带入上述式子,可以得到不同工作点处的线性近似公式:
(1)当时,
。
(2)当时,
。
(3)当时,
。
(4)当时,
。
(5)当时,
。
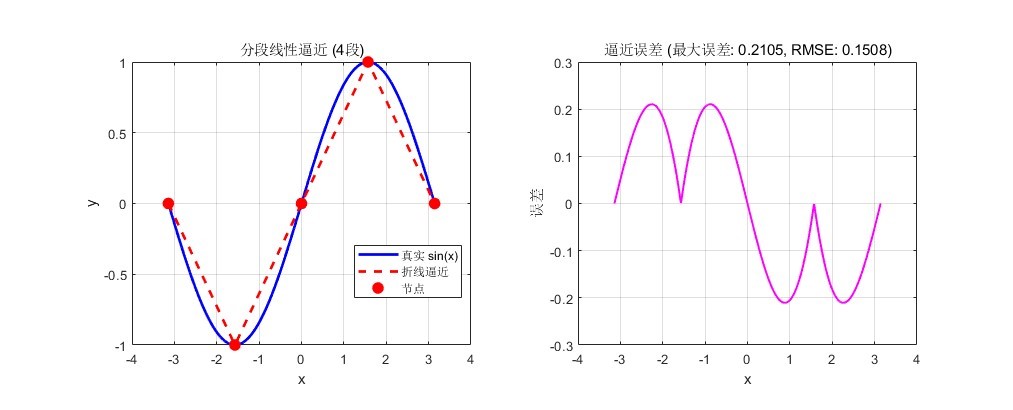
除了工作点处,其余sin函数处的曲线可以看成是该5条直线的“加成”,如下图所示。
可以看到,sin(x)函数可以由这5条直线近似化而成,可以看一下它与原曲线的误差变化。
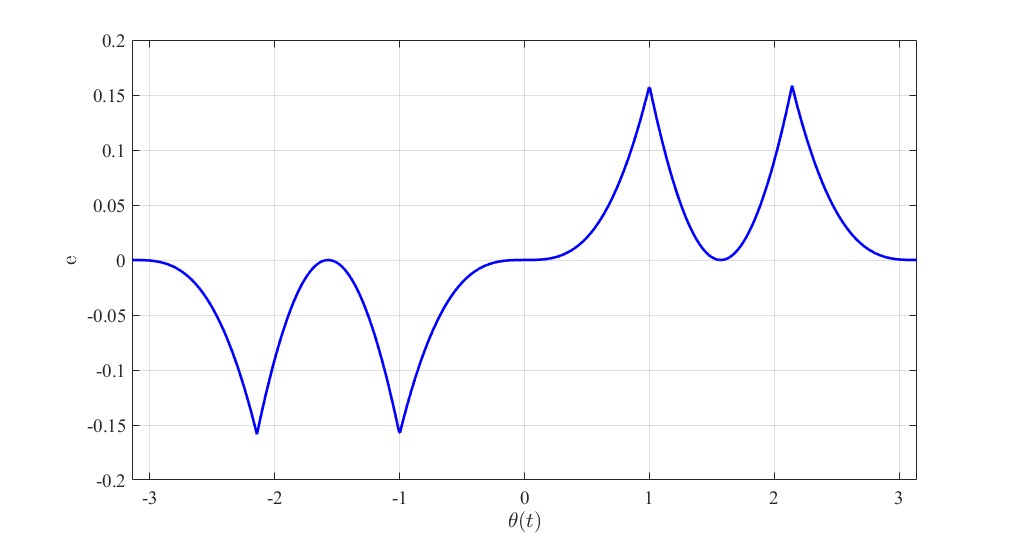
相较于前述的3段折线最大误差略有减小,这主要是泰勒展开的功劳。误差虽不大,但是仍旧存在。因此对于这些工作点间的误差大的曲线,需要用模糊技术圆滑过渡修饰一下。如何过渡呢?就是拿一点前面的拿一点后面的,和稀泥一下得到一点承上启下的。至于拿多少,则需要用隶属度函数来确定。隶属度,就是有多少成分属于前面还是后面的工作点。
三角形函数是最简单的,有一个明显起降过程,也就是我们需要的过渡过程。在工作点隶属度可以拉满设置为1,在其它非工作点逐渐淡化至0.
针对这个“5点4段线”可以设置5个三角隶属函数。其中,隶属函数
具体设计如下:
我们可以绘制出这5条隶属函数的图像。
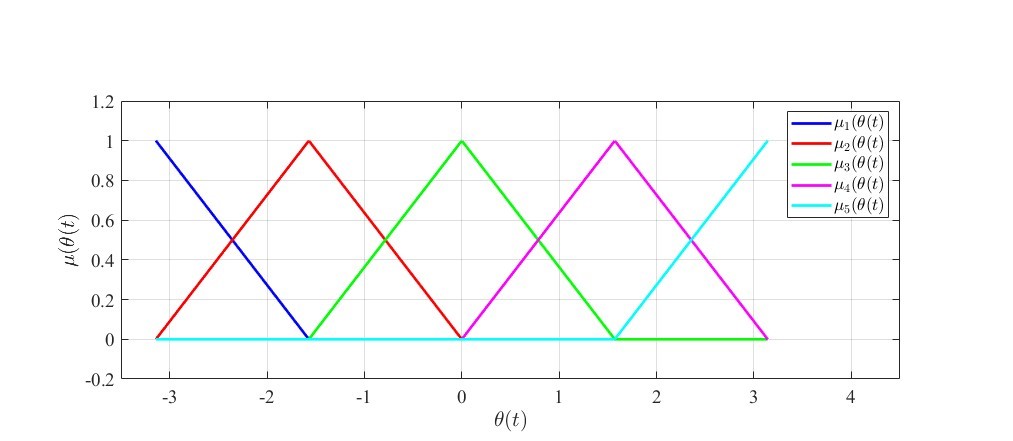
可以看到,这些隶属函数一直保证在中取任意数值时,
。而且在任意工作点处,都是此消彼长的关系,符合的我们的线性化趋势。
因此,可以使用模糊推理得出,T-S模糊系统中输出为各规则输出的加权和:
需要注意的是,某一取值下,并不要求严格
,这只是针对满足单位划分的情况下。例如,当出现高斯隶属函数时,
。因此,上式可以进一步简化为:
至此,我们完成了基于T—S模糊技术的线性化过程。
三、T—S模糊技术在机器人动力学中的应用。
我们知道了机器人动力学的非线性方程:
其中非线性特性是由引起的。
我们也知道了如何利用T-S模糊技术处理对其进行线性化近似:
因此,我们可以基于T-S模糊技术将机器人动力学线性化。
规则1:如果在
附近(
),则:
规则2:如果在
附近(
),则:
规则3:如果在
附近(
),则:
规则4:如果在
附近(
),则:
规则5:如果在
附近(
),则:
当在
上的其它区域时,则可表示为这5个动力学系统关于隶属函数的加权和。
可以利用MATLAB中的SIMULINK验证改模糊方法的准确性。
假设初始状态为,此时机械臂相当于是平举。假如不施加控制力矩,机械臂按理说应该受重力作用下摆运动,然后收摩擦阻力影响摆幅逐渐减小,直至停留在
的位置处,实际也是如此,如图所示。
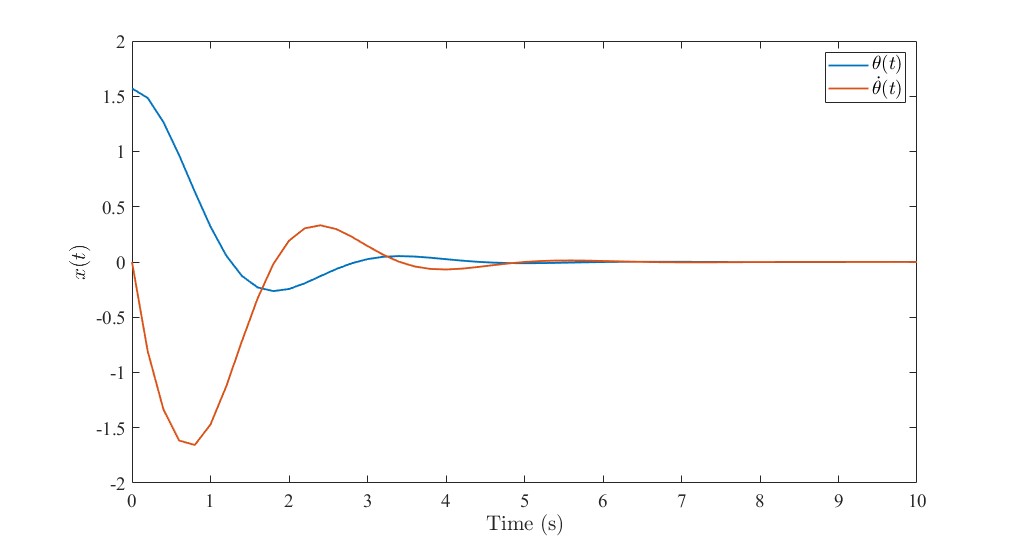
该机械臂设置,
,
,
,
,单位均为国际标准单位。
同样,可以根据前述5点4段模糊模型,仿真出T-S模糊系统输出曲线,如下图所示。
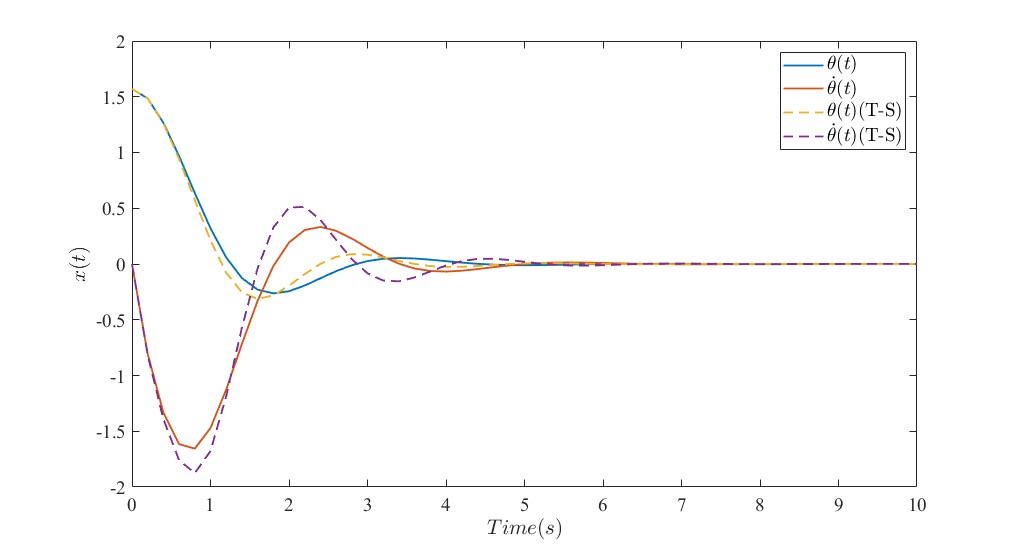
此时我们很容易发现,虚线为模糊系统的响应输出曲线,与实际系统输出曲线存在较大差异,并未完成近似的功能。
究其原因是由于带了后面的常数项,此时系统并未变成线性系统,而是成为了仿射系统。
通常,线性系统的表现形式为,而仿射系统作为介于线性与非线性系统的中间态,其表现形式为
,其中
往往代表了非线性项,其不满足线性叠加原理,因此无法简单用T-S模糊方法分解。
那该如何办呢?其实稍微改进一下原机器人动力学方程就可以了。
注意到,主要是利用了
的方式与
产生联系进而将非线性项线性化,然而其中在不同情况下容易引入
进而导致系统无法成为线性系统。可以换个思路,直接将
变为
这种比例乘法形式,避免了常数项的产生,进而避免了系统演变为仿射系统。不要怕系数项变复杂,同样我们可以利用T-S模糊的方法处理。
基于上述结论,我们可以得到机器人动力学方程表达式为:
令,此时
,
。系统矩阵A(t)是时变的,其中
可以用名义粘滞系数简化表示,但是
要如何变为常数项呢?这里需要借助
T-S模糊的方法。
首先来观察一下在区间
上的图像,见前第二张图,可以看到它是一个光滑的偶函数。当
时,
;当
远离0时,
逐渐减小缩小至0。我们不希望矩阵A出现第一列空白的,所以我们取一个无限小值
替代0。
与前述T-S模糊方法一样的线性化手段,选取进行线性化展开。对于
而言,
没有区别,因此,我们可以得到T-S模糊的动力学模型规则:
规则1:如果接近于0,则系统模型表示为:
其中,。
规则2:如果接近于
,则系统模型表示为:
其中,。
接下来需要定义两个模糊隶属函数和
,其需满足
。用最简单的比例加权函数作为隶属函数就可以,例如
可以看到,这两个模糊隶属函数和
相当于表示了
分别与1和
的距离。
接下来就剩这个,它应该是一个很小的数,在文献中通常取
。
因此,经T-S模糊化后的线性机器人动力学系统可以变为:
同样经过SIMULINK仿真可以得到
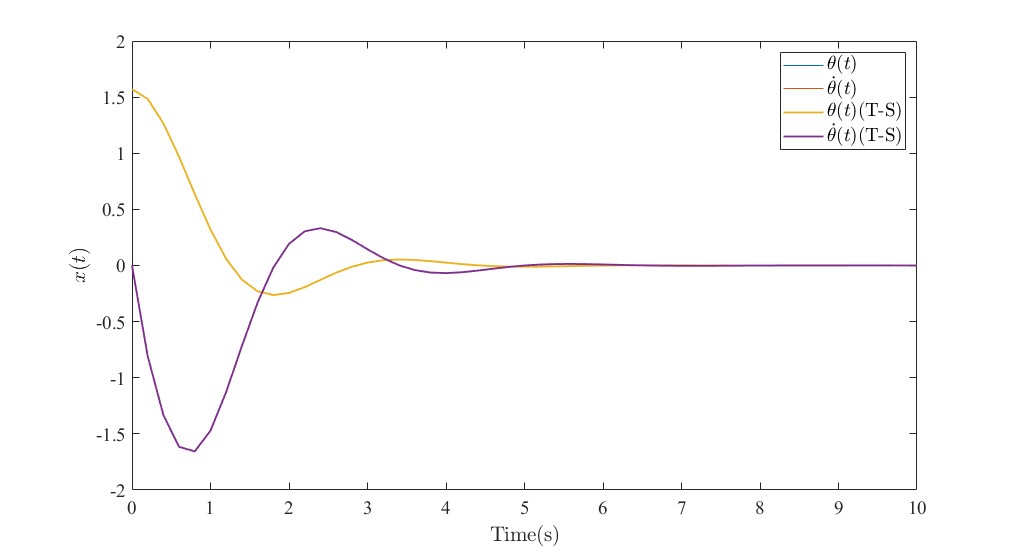
其误差曲线如图所示。
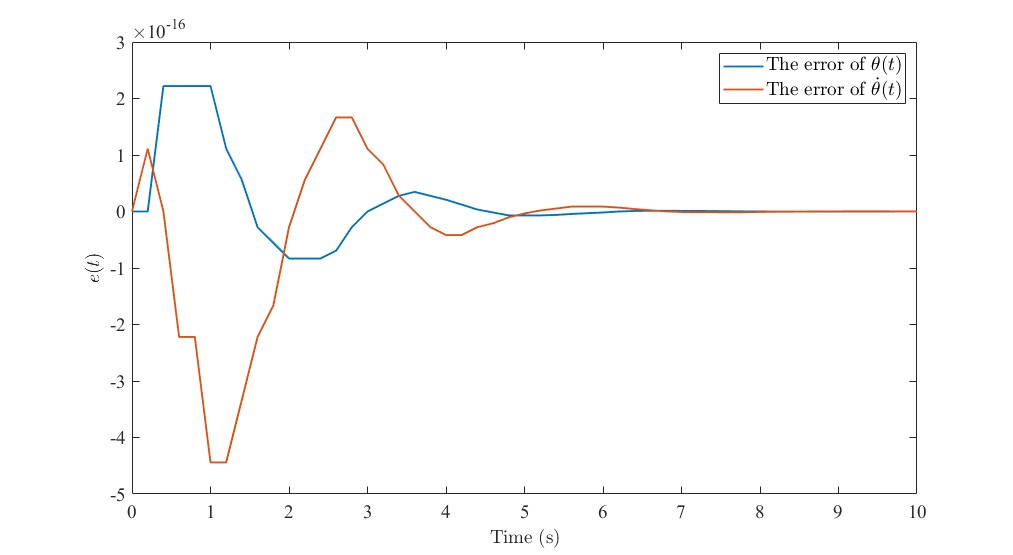
我们可以看到,当T-S模糊后的系统从仿射系统变成线性系统后,其误差相较于原始非线性系统而言非常小,几乎是0。由此可见T-S模糊方法在机器人系统这一典型非线性系统中线性化的优势。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 15
15 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)