机器人运动学-位姿表示方法
·
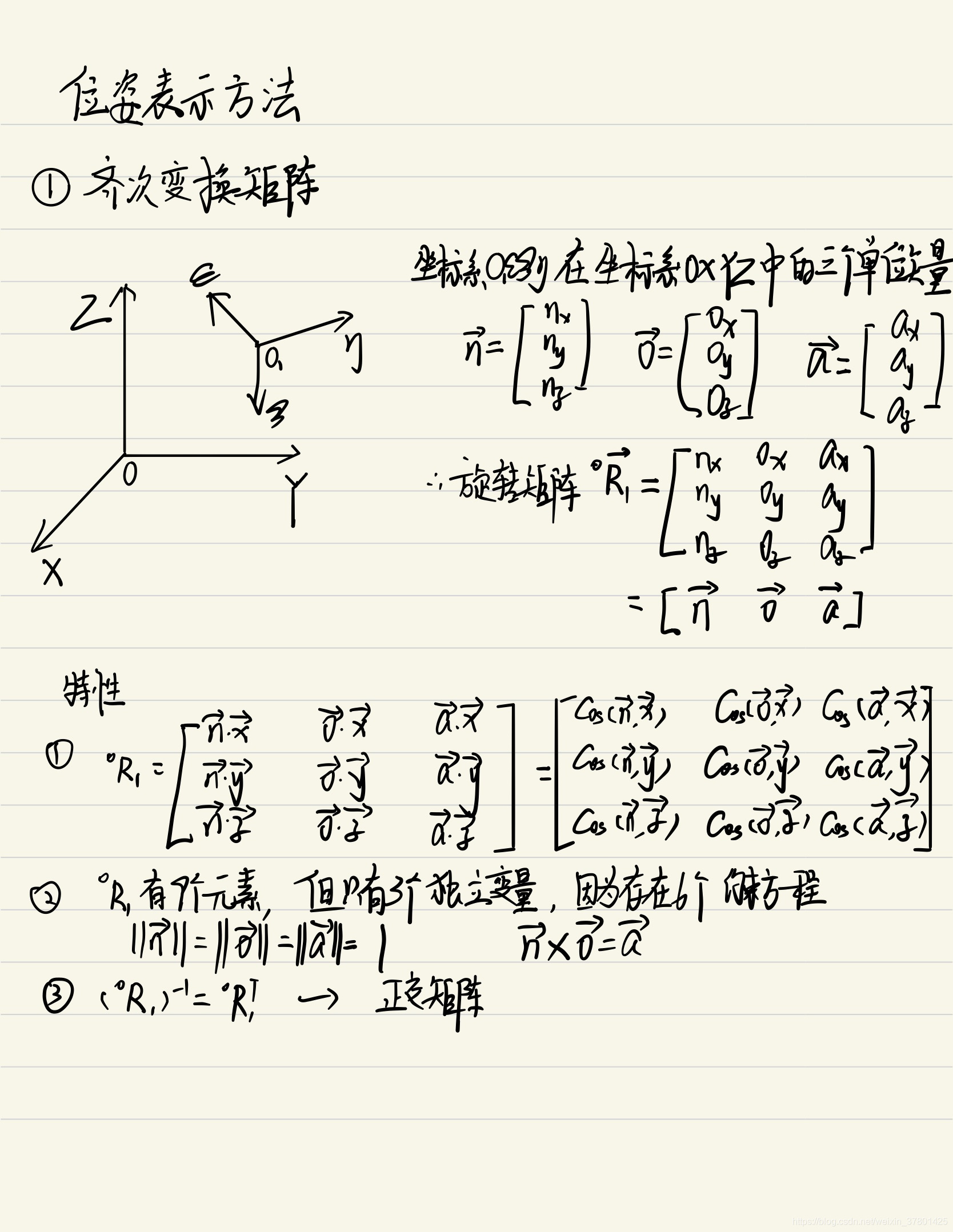
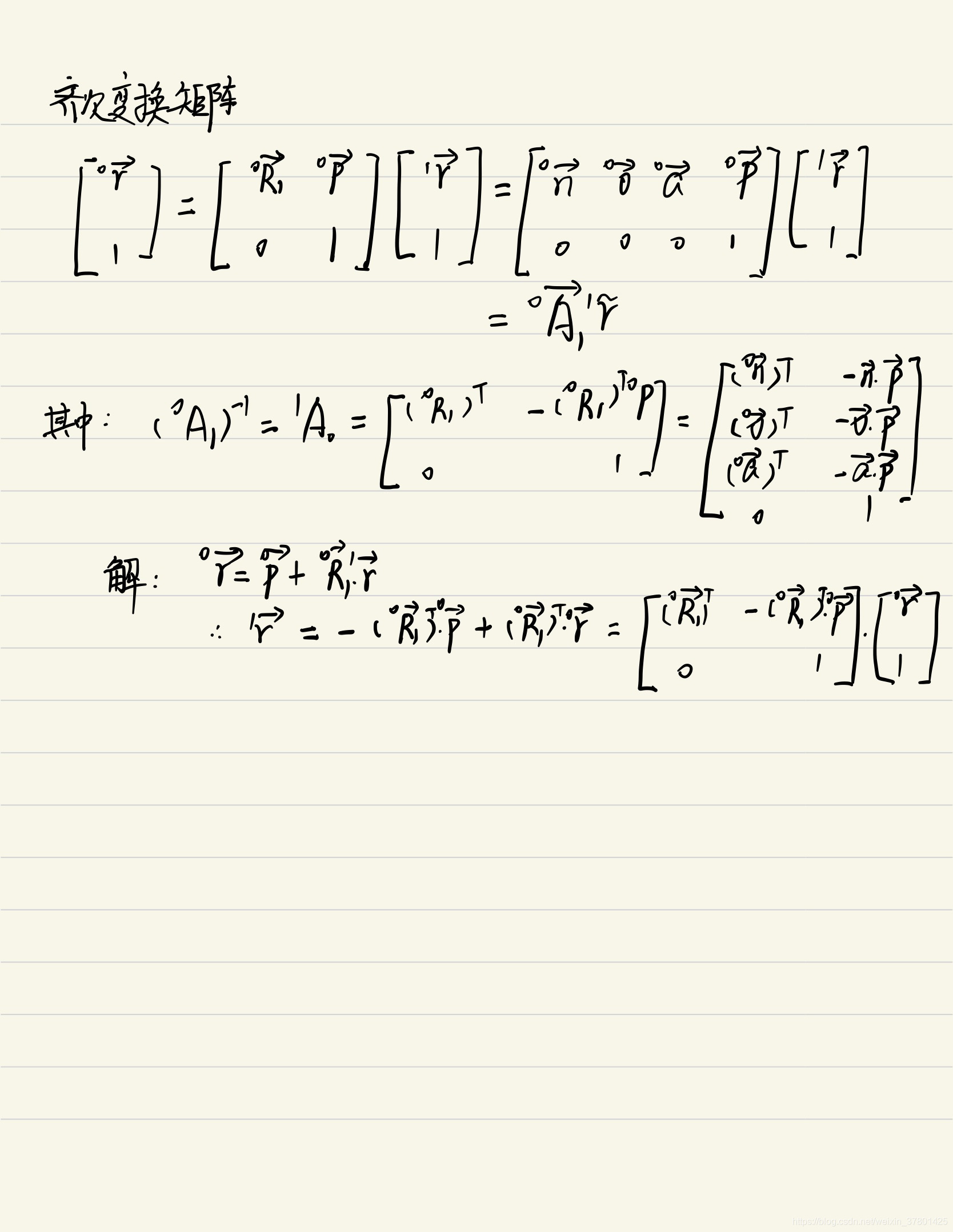
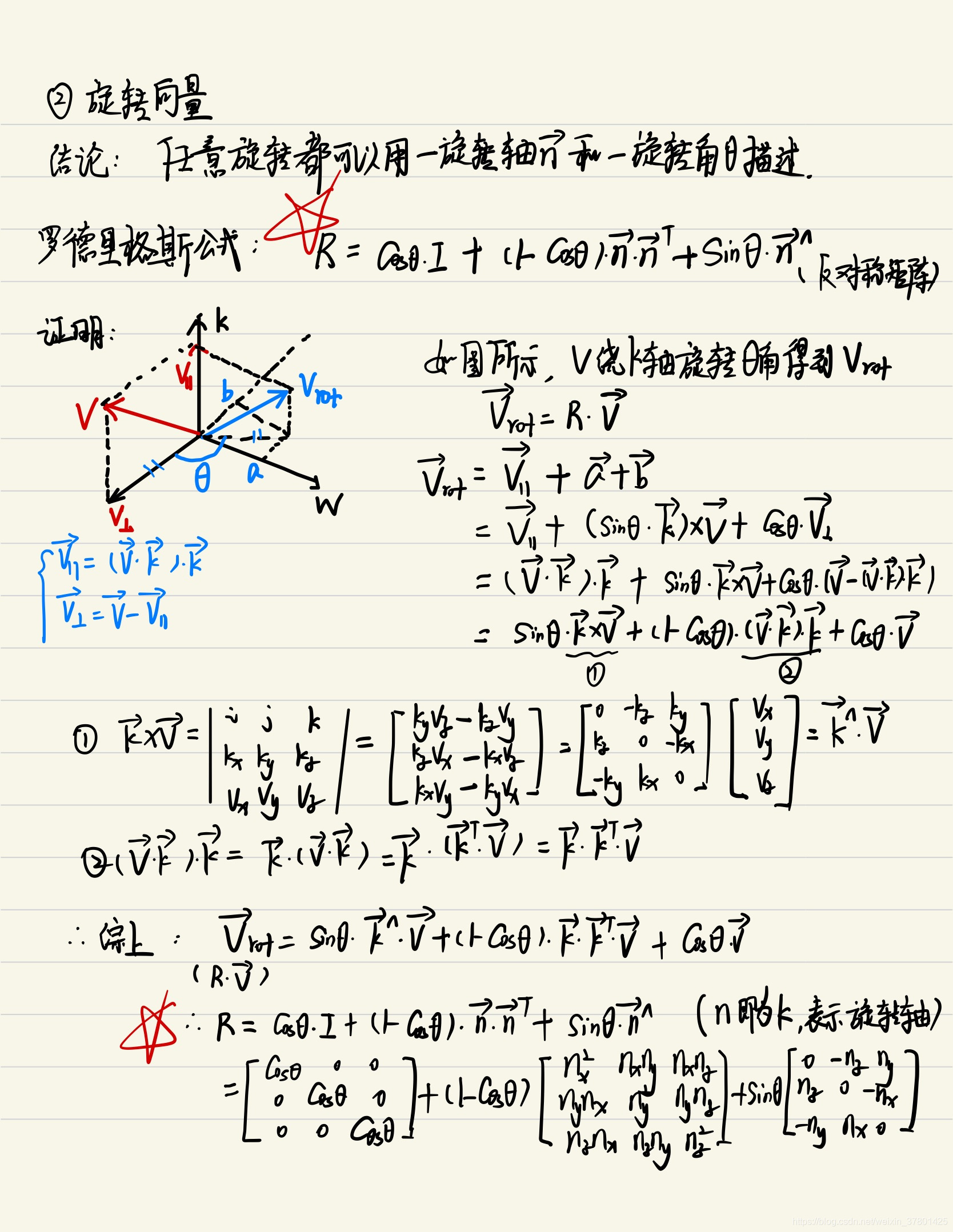
机器人运动学问题主要是研究机器人关节变量与末端执行器位置和姿态间的关系,包括正运动学问题以及逆运动学问题。这里主要列举机器人坐标系转换常用的四种方式:旋转矩阵与欧拉角,旋转向量(轴角法)与四元数。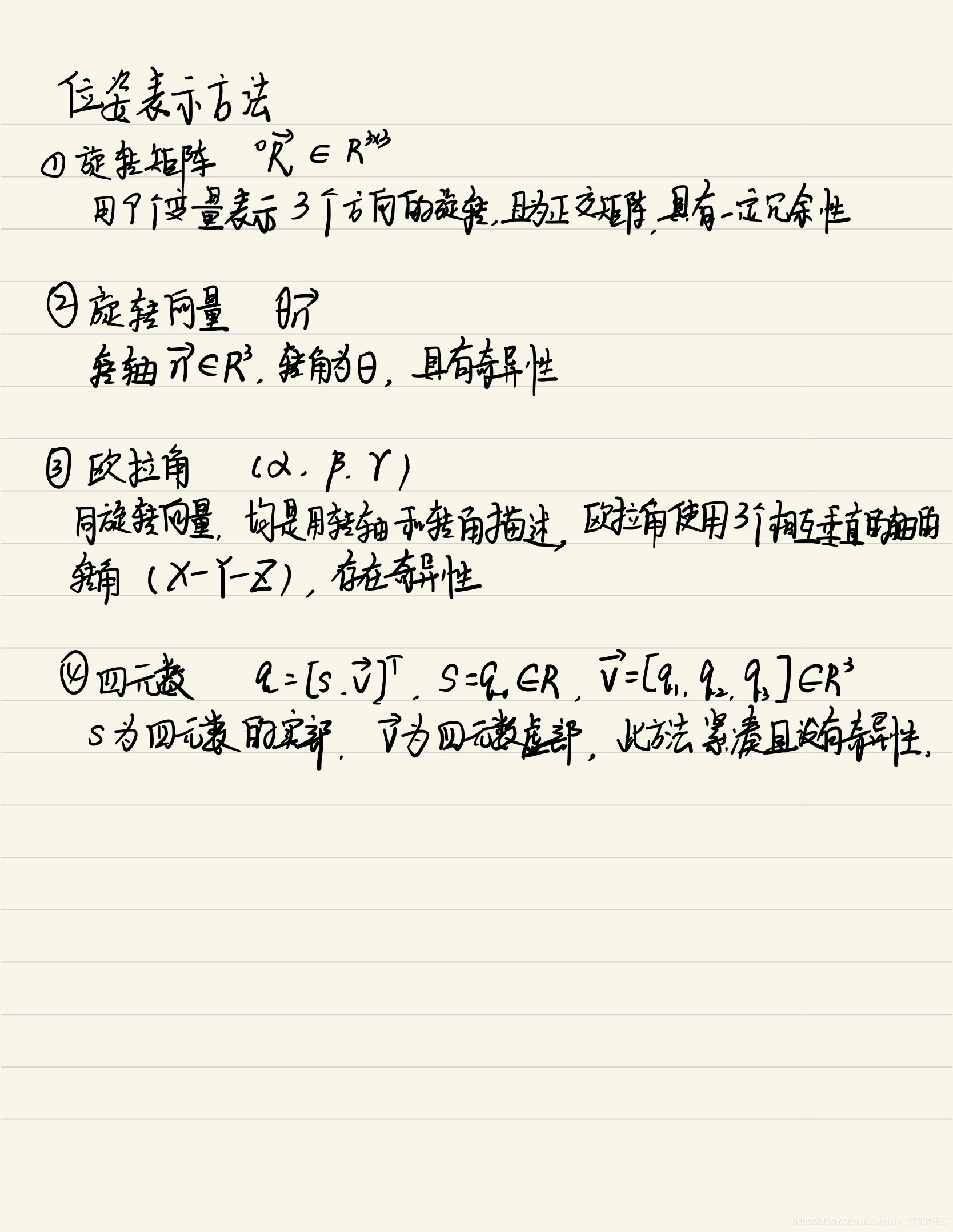
 另外欧拉角与四元数,参考这位大神博主文章
另外欧拉角与四元数,参考这位大神博主文章
1 做控制要知道的刚体旋转知识(二)四元数
2 做控制要知道的刚体旋转知识(三)欧拉角

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 4
4 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)