isaac sim导入机器人模型
在打开的isaac sim界面中,左下角content窗口中根据路径选择自己的机械臂usd文件,open file打开。在弹出来的以下窗口中如果之前的场景是空的选择don't save,如果之前有其他场景需要保存的就自己保存吧。在弹出的窗口中根据路径选择自己本地的机械臂usd文件,点击右下角的 open file。如果机器人还没有usd文件,请见以上方法使用机械臂配置文件生成usd文件。终端cd
Isaac sim 如何用urdf文件生成usd-CSDN博客
如果机器人还没有usd文件,请见以上方法使用机械臂配置文件生成usd文件
机器人操控仿真数据的生成和使用推荐官方教程:
前提准备:
安装好isaac sim环境 推荐4.5.0
机械臂usd文件
一、打开isaac sim
终端cd 到isaac sim的安装目录,***替换为自己主机名,并将路径修改为自己的机械臂USD文件路径
cd /home/***/.local/share/ov/pkg/isaac-sim-4.5.0运行isaac sim
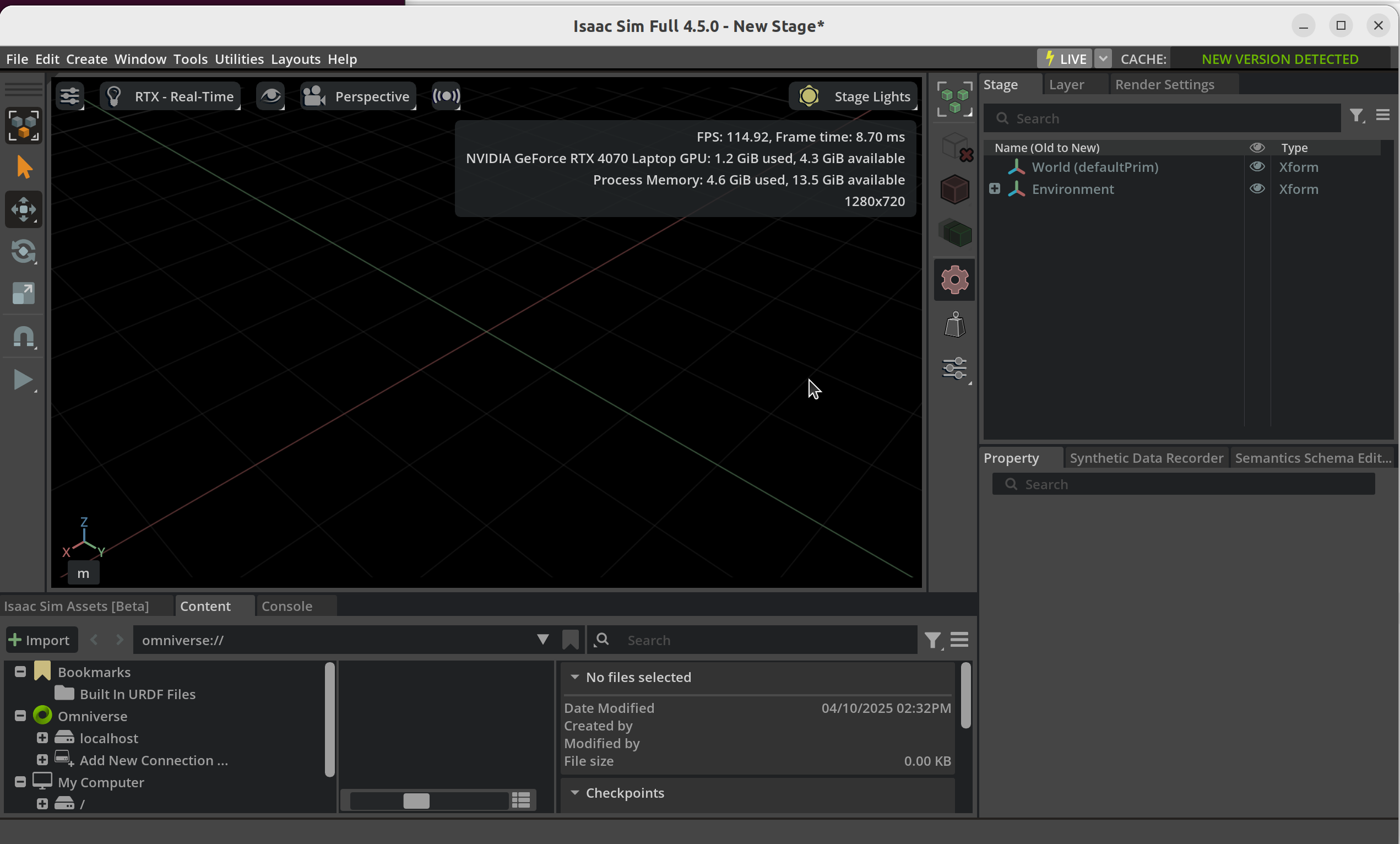
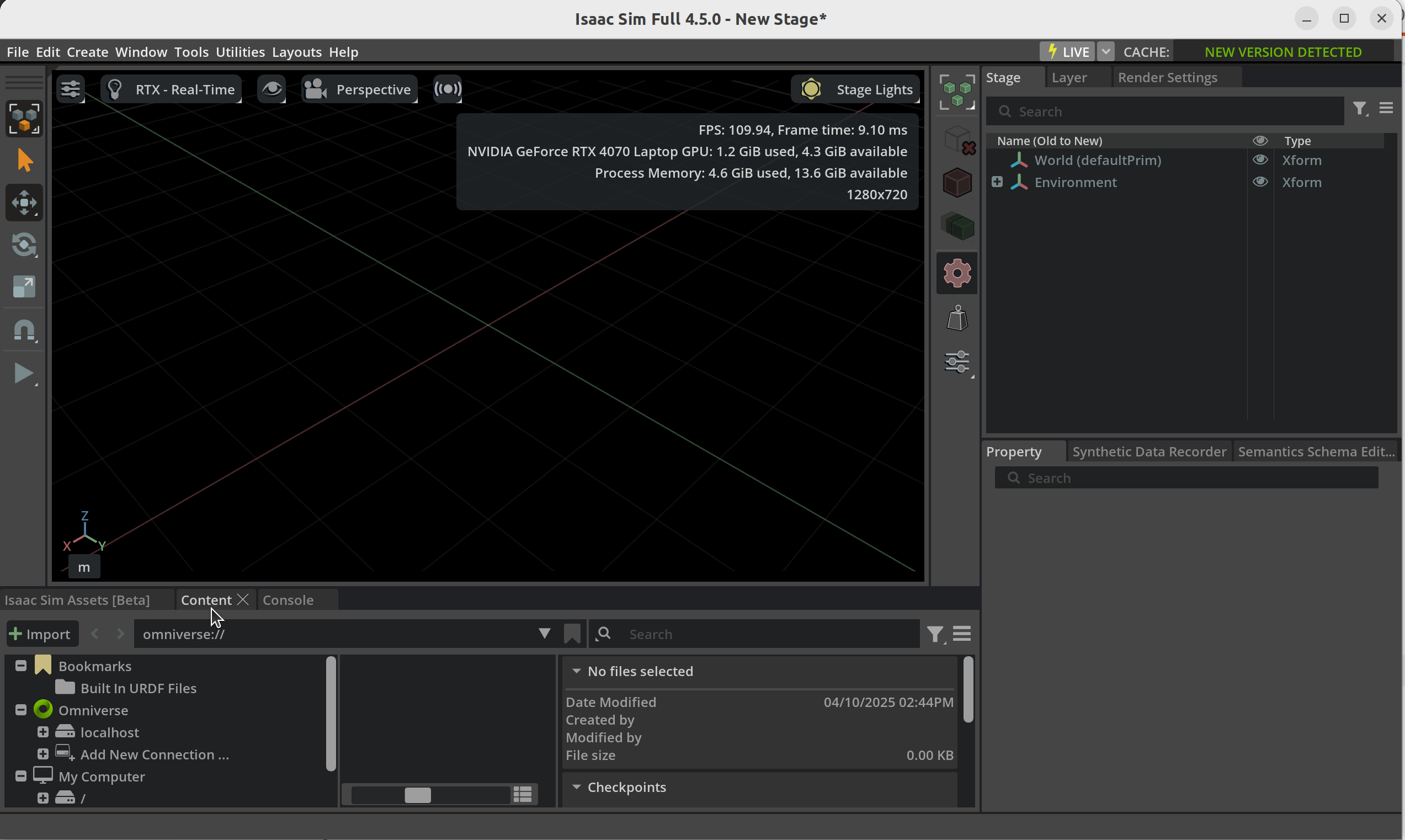
./isaac-sim.sh打开成功会出现以下界面:
注意:如果弹出未响应窗口需要等待一下即可
二、引入机械臂
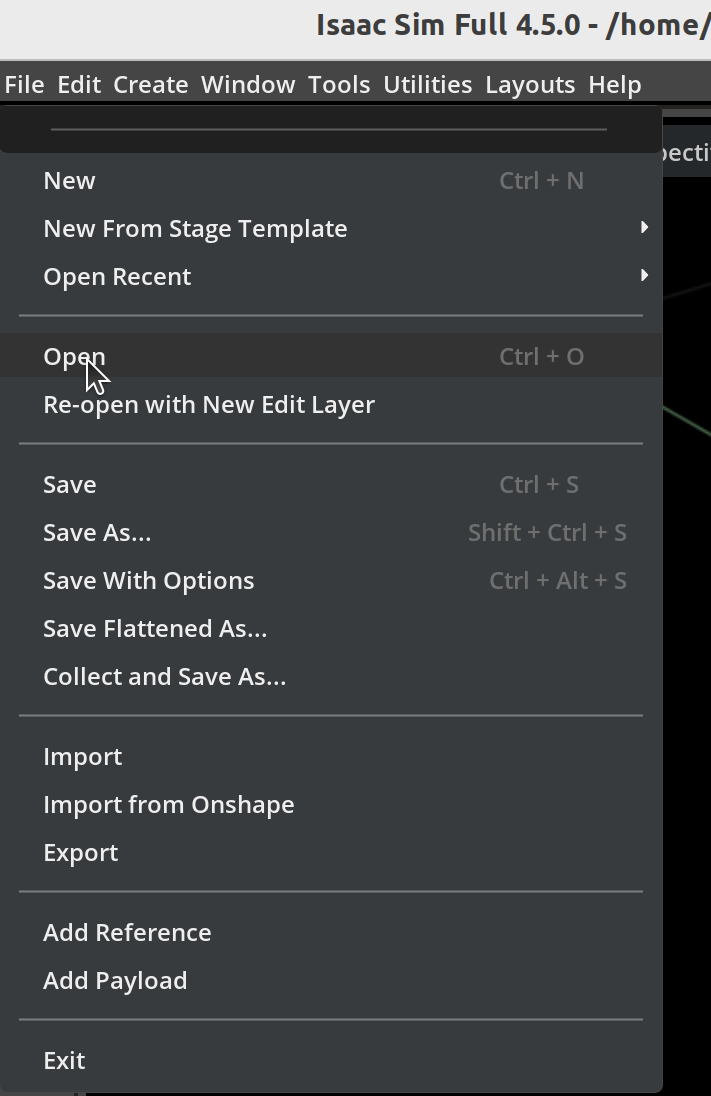
方法一:
file -> open
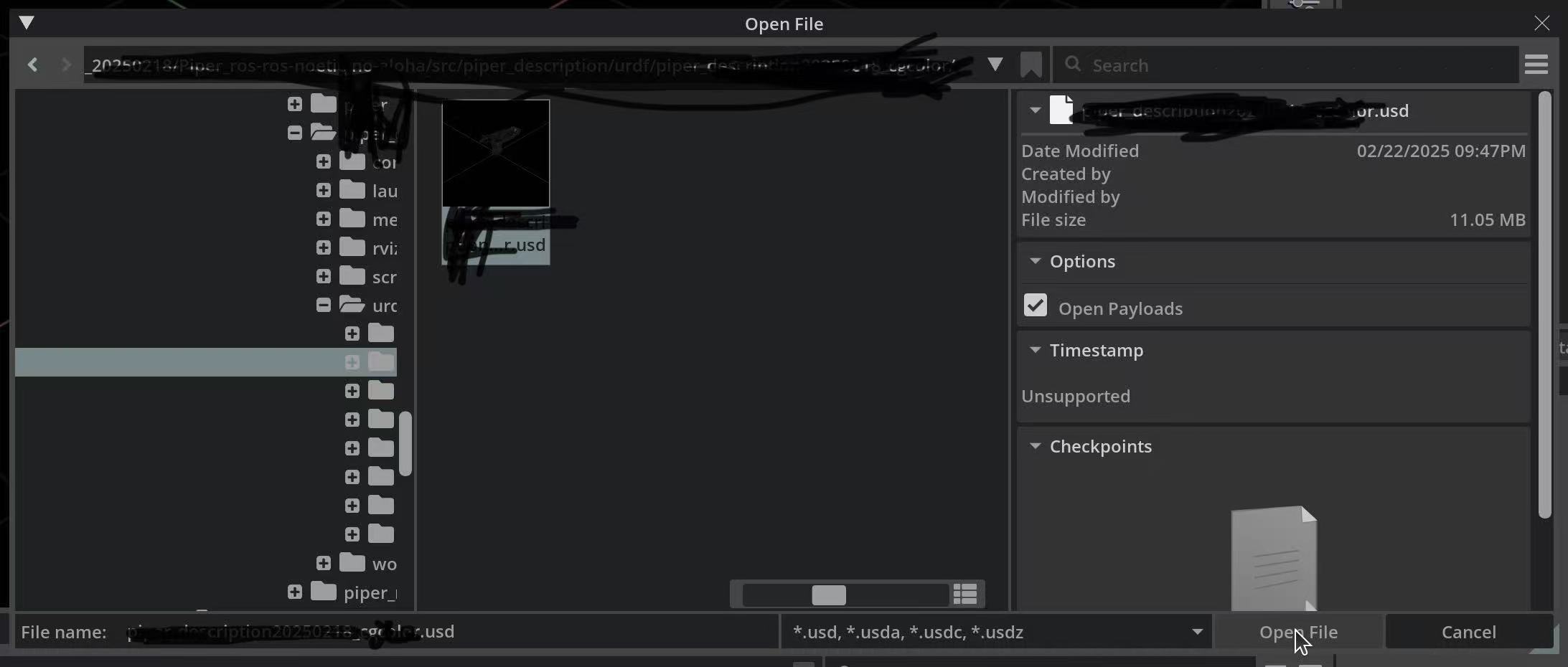
在弹出的窗口中根据路径选择自己本地的机械臂usd文件,点击右下角的 open file
在弹出来的以下窗口中如果之前的场景是空的选择don't save,如果之前有其他场景需要保存的就自己保存吧
引入成功就可以在中间窗口看到自己的机械臂了。
方法二
在打开的isaac sim界面中,左下角content窗口中根据路径选择自己的机械臂usd文件,open file打开

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)