PCL 计算点云的倒角距离(Chamfer Distance)
Chamfer Distance 广泛用于。
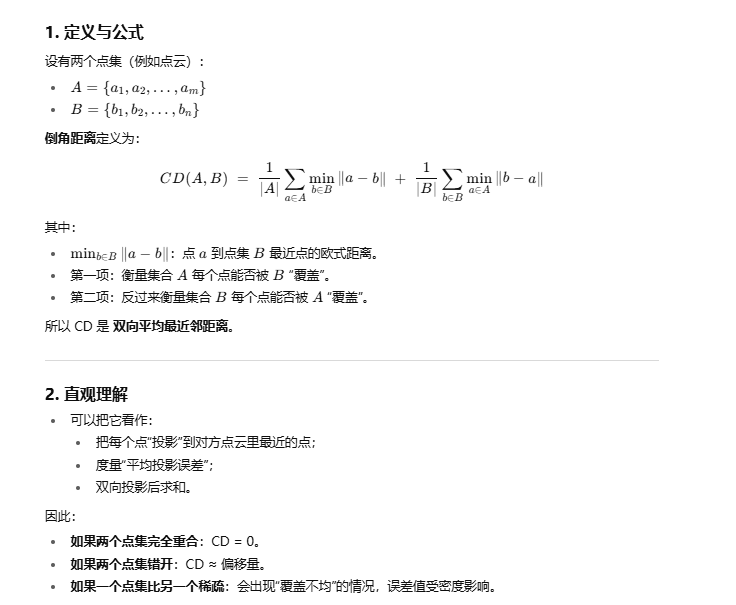
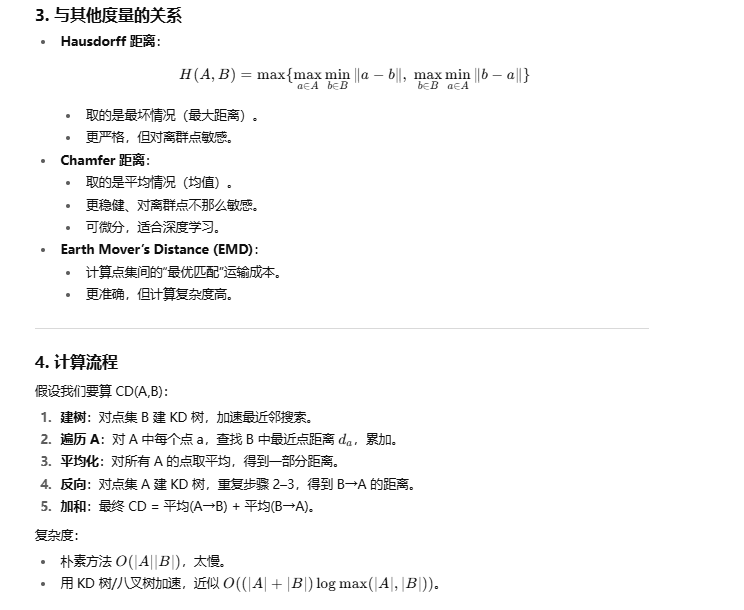
一、算法原理
二、代码实现
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/kdtree/kdtree_flann.h>
#include <pcl/point_cloud.h>
#include <pcl/common/common.h>
#include <pcl/common/impl/common.hpp> // for isFinite
#include <type_traits>
// 一侧的平均最近邻距离和(可选平方)
template <typename PointT>
static double oneSidedChamfer(
const typename pcl::PointCloud<PointT>::ConstPtr& from,
const typename pcl::PointCloud<PointT>::ConstPtr& to,
bool squared)
{
pcl::KdTreeFLANN<PointT> kdtree;
kdtree.setInputCloud(to);
std::vector<int> knn_indices(1);
std::vector<float> knn_sq_dists(1);
double sum = 0.0;
std::size_t valid_cnt = 0;
for (const auto& p : *from)
{
if (!pcl::isFinite(p)) continue; // 跳过NaN/Inf
if (kdtree.nearestKSearch(p, 1, knn_indices, knn_sq_dists) > 0)
{
const double d2 = static_cast<double>(knn_sq_dists[0]);
sum += squared ? d2 : std::sqrt(d2);
++valid_cnt;
}
}
return (valid_cnt > 0) ? (sum / static_cast<double>(valid_cnt)) : 0.0;
}
/**
* @brief 计算双向倒角距离(Chamfer Distance)
* @param cloud_a, cloud_b 两个点云
* @param squared 若为 true,则返回“平方倒角”(L2^2),无需开根号,速度更快;false 则为标准倒角(L2)
* @return 倒角距离标量
*/
template <typename PointT>
double computeChamferDistance(
const typename pcl::PointCloud<PointT>::ConstPtr& cloud_a,
const typename pcl::PointCloud<PointT>::ConstPtr& cloud_b,
bool squared = false)
{
if (!cloud_a || !cloud_b || cloud_a->empty() || cloud_b->empty())
return std::numeric_limits<double>::quiet_NaN();
// 双向平均
const double ab = oneSidedChamfer<PointT>(cloud_a, cloud_b, squared);
const double ba = oneSidedChamfer<PointT>(cloud_b, cloud_a, squared);
return ab + ba;
}
int main()
{
using PointT = pcl::PointXYZ;
pcl::PointCloud<PointT>::Ptr cloudA(new pcl::PointCloud<PointT>);
pcl::PointCloud<PointT>::Ptr cloudB(new pcl::PointCloud<PointT>);
if (pcl::io::loadPCDFile<PointT>("E:/data/1.pcd", *cloudA) != 0) {
std::cerr << "读取 E:/data/1.pcd 失败\n";
return 1;
}
if (pcl::io::loadPCDFile<PointT>("E:/data/2.pcd", *cloudB) != 0) {
std::cerr << "读取 E:/data/2.pcd 失败\n";
return 1;
}
// 标准倒角(L2)
double chamfer_l2 = computeChamferDistance<PointT>(cloudA, cloudB, /*squared=*/false);
std::cout << "Chamfer (L2): " << chamfer_l2 << "\n";
// 平方倒角(L2^2)——更快,常用于优化目标
double chamfer_l2_sq = computeChamferDistance<PointT>(cloudA, cloudB, /*squared=*/true);
std::cout << "Chamfer (L2^2): " << chamfer_l2_sq << "\n";
return 0;
}
三、应用场景
倒角距离(Chamfer Distance, CD)虽然概念简单(最近邻平均距离的对称形式),但在点云、计算机视觉、图形学等领域用得非常多。我分几个常见场景给你讲清楚:
1. 点云相似度评价
-
场景:机器人/三维重建/配准时,需要衡量两片点云是否“对齐”。
-
做法:配准后,把源点云和目标点云计算倒角距离,数值越小说明对齐越好。
-
特点:比简单的欧式距离直观,因为它考虑了“每个点的最近邻覆盖度”。
-
例子:ICP 或 NDT 配准完成后,用 CD 评价注册精度。
2. 三维重建与深度学习
-
场景:神经网络生成或补全点云时,需要一个 loss 函数来度量预测点云与真实点云的差异。
-
做法:常用 Chamfer Distance 或 Earth Mover’s Distance (EMD) 作为损失。
-
特点:
-
CD 易于计算(只需最近邻查询)。
-
可微分,适合反向传播。
-
-
例子:
-
PointNet / AtlasNet / 3D GAN 等方法里常用 CD 来训练网络。
-
点云补全任务:预测的点集和真实点集用 CD 衡量差异。
-
3. 计算机图形学与形状比较
-
场景:比较两个 3D 模型(mesh/点云)的几何相似性。
-
做法:取模型表面点采样,计算 CD。
-
用途:
-
形状检索(shape retrieval):检索数据库中与查询模型最接近的物体。
-
模型简化(decimation)后检查保真度。
-
4. 三维检测 / 分割 / 配准精度评估
-
场景:3D 检测或分割任务,需要把预测的物体表面点集与 GT(ground truth)表面对比。
-
用途:
-
评估预测物体边界与真实边界的接近程度。
-
可替代 IoU(体素级)作为几何精度指标。
-
5. 医学影像与体素/曲面对比
-
场景:医学图像分割,常需要比较预测分割表面与医生标注表面。
-
做法:提取两个分割结果的边界点集,计算倒角距离。
-
用途:
-
辅助评估分割算法精度。
-
在 3D 器官/肿瘤表面拟合中常见。
-
6. 机器人感知与规划
-
场景:机器人在感知(视觉、激光雷达)得到环境点云后,需要和已有地图或目标模型比对。
-
用途:
-
比较环境扫描与 CAD 模型的接近程度。
-
评估路径规划中候选位姿的表面对齐度。
-
-
优势:计算快,适合实时性要求。
7. 其他应用
-
生成式对抗网络 (GAN) 图像/点云生成:用 CD 衡量生成分布与真实分布的差异。
-
形状补全与编辑:衡量局部修改前后是否保留整体形状。
-
三维匹配评价:PPF、特征匹配后,计算 CD 作为整体匹配效果指标。
✅ 总结:
Chamfer Distance 广泛用于 点云配准评价、深度学习的损失函数、3D 模型对比、分割评估、机器人感知 等场景。
它的优点是 直观、对点数不要求一致、可微分、速度快。
缺点是 对密度不均衡敏感,容易受离群点影响(这也是为什么有时要用 截断 CD 或 分位数 CD,或者改用 EMD/Hausdorff 距离)。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 5
5 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)