二连杆机器人动力学——机械臂动力学计算实例
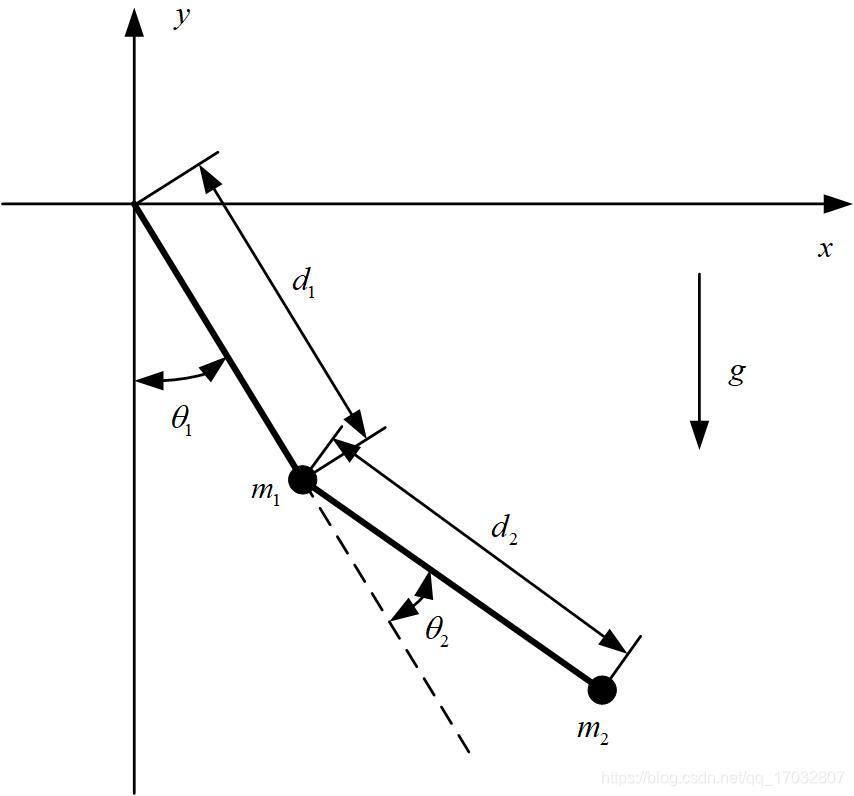
1. 机器人系统模型假设一个二连杆机械臂结构如图所示。其中,机械臂的质量主要富集于机器人关节处,分别为:、;机械臂连杆长度分别为:、;机械臂关节运动为纯旋转,所以仅存在为角度的广义坐标:、;重力加速度为:。根据定义拉格朗日方程:其中,L为拉格朗日函数,而K为系统广义动能,P为系统广义位能;为连杆子系统索引号();为第个子系统的动能和位能的坐标(位移和角度),为相应的广义速度(线速度和角速度);为第
1. 机器人系统模型
假设一个二连杆机械臂结构如图所示。
其中,
机械臂的质量主要富集于机器人关节处,分别为:、
;机械臂连杆长度分别为:
、
;机械臂关节运动为纯旋转,所以仅存在为角度的广义坐标:
、
;重力加速度为:
。
根据定义
拉格朗日方程:
其中,
L为拉格朗日函数,而K为系统广义动能,P为系统广义位能;
为连杆子系统索引号(
);
为第
个子系统的动能和位能的坐标(位移和角度),
为相应的广义速度(线速度和角速度);
为第
个子系统的广义力(力和力矩)。
2. 计算各个连杆的动能及位能
该二连杆机器人系统可将机器人拆解为两个单独连杆(连杆1和连杆2 )的子系统。
2.1 连杆1的动能
2.2 连杆1的位能
2.3 连杆2的动能
2.4 连杆2的位能
2.5 系统总能量
总动能:
总位能
3. 拉格朗日平衡法求动力学方程
二连杆机械臂的拉格朗日函数L可以计算得:
让L对分别对 进行求导:
;
;
机械臂各关节力矩分别为 ,根据拉格朗日方程可以得到:
整理成动力学方程,
写成矩阵形式
通常上述矩阵形式可以用二阶非线性微分方程描述:
其中,分别为机器人广义坐标、广义速度、广义加速度;
为机械臂惯性矩阵;
表示离心力和科氏力矩阵;
表示机器人重力矩阵;
表示机器人广义力。
常用性质:
性质1:是一个斜对称矩阵;
性质2:是一个对称正定矩阵;

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 17
17 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)