转向梯形优化计算
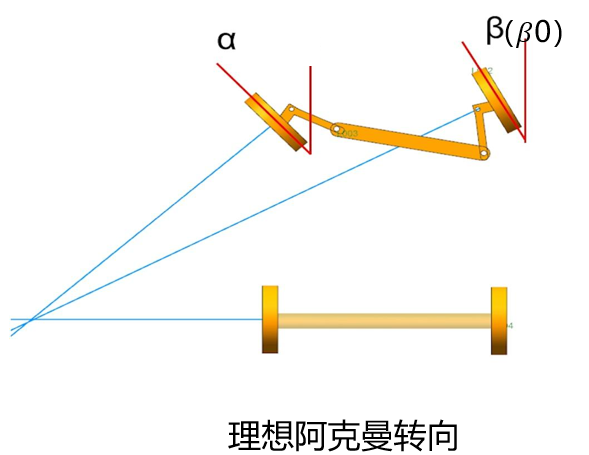
1、阿克曼转向原理
汽车在行驶过程中(直线和转弯工况下),每个车轮的运动轨迹必须符合它的自然运动轨迹,从而保证轮胎与地面始终处于纯滚动(减少轮胎的磨损)。
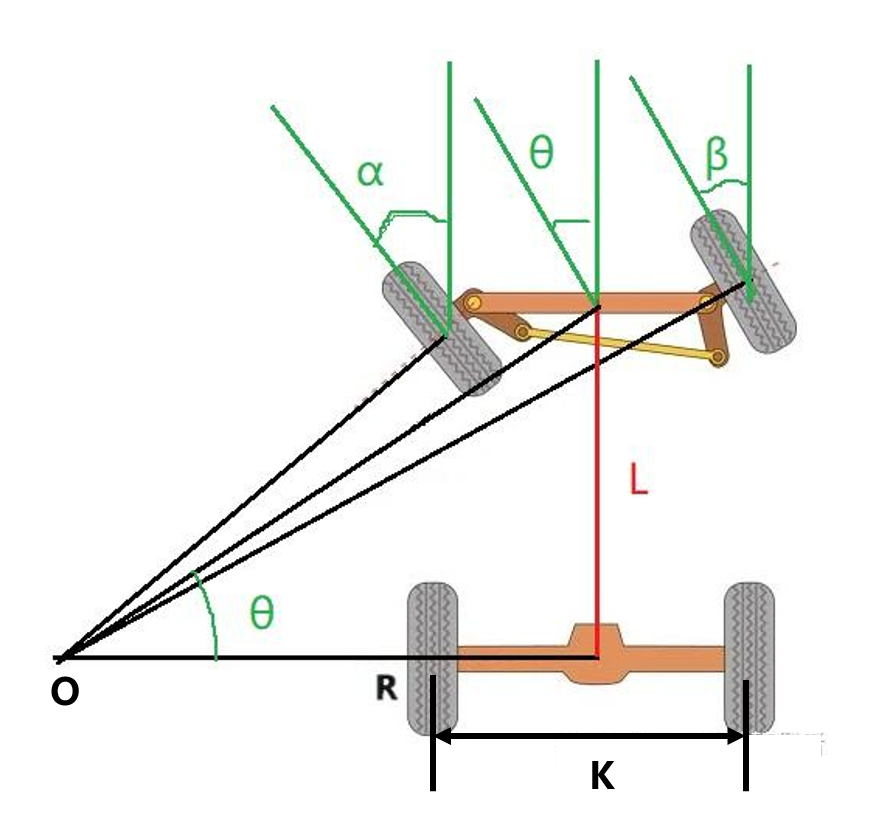
由图可得到车辆得阿克曼公式:
2、转向梯形优化计算
(1)梯形参数计算方法
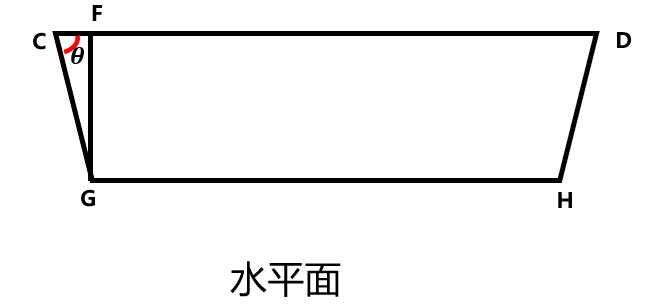
以车辆的车架为水平面,垂直于车架的为垂直面,则转向梯形则为一个倾斜的梯形面,将该梯形面分别投影到车辆的水平方向和垂直方向,则可以得到转向梯形的垂直投影面和水平投影面,如图所示:
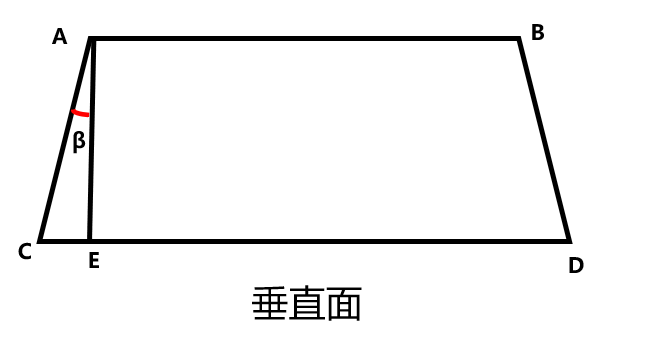
需求参数:
lAB为主销中心距、𝑙𝐺𝐻为横拉杆球销中心距
𝑙𝐹𝐺横拉杆球销中心距车轮中心前后距离
𝑙𝐴𝐸球销中心距车轮中心高度、𝛽主销内倾角
计算参数:
梯形底角θ 梯形臂长度𝑙𝐶𝐺 梯形底边长𝑙𝐶𝐷
计算公式为:
(2)梯形参数计算校核
为了使设计的梯形更好的满足阿克曼转向梯形,因此需要进行梯形校核,取上述计算的梯形臂和转向梯形底角,取一个确定的内转角α计算相对应的外转角β,如下图所示的梯形校核计算公式:
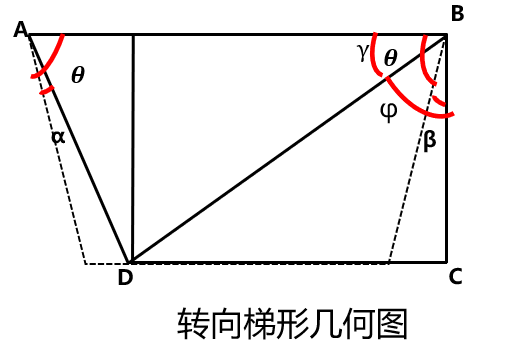
计算外转角β:
根据阿克曼转向公式计算理想的外转角β0:
计算校正率:
(3)梯形参数优化方法
为了使实际外转角更贴合于理想的外转角,利用做差法进行转向梯形臂和转向底角的优化,建立优化设计目标函数为:
其中:X为优化变量,根据上述推导过程可知其由转向梯形 底角θ和梯形臂长度m组成;αmax 为内前轮转角的最大值; ω(αi )为加权系数,其不同取值反映的是不同外前轮理论转 角和实际转角之间相对误差对转向性能的影响程度
按照经验可知,车辆在转向过程中,转向小角度使用频率较高,轮胎的磨损在转向角小时比较严重,因此ω(αi )加权函数设计为正态分布函数:
其中,ai为内转角,ω(αi )加权系数
为保证梯形转向机构正常运转,还需要满足如下约束条件:
其中,m为梯形臂长,θ为梯形底角,M为车辆的轮距,L为车辆的轮距
3、利用matlab生成GUI梯形优化界面
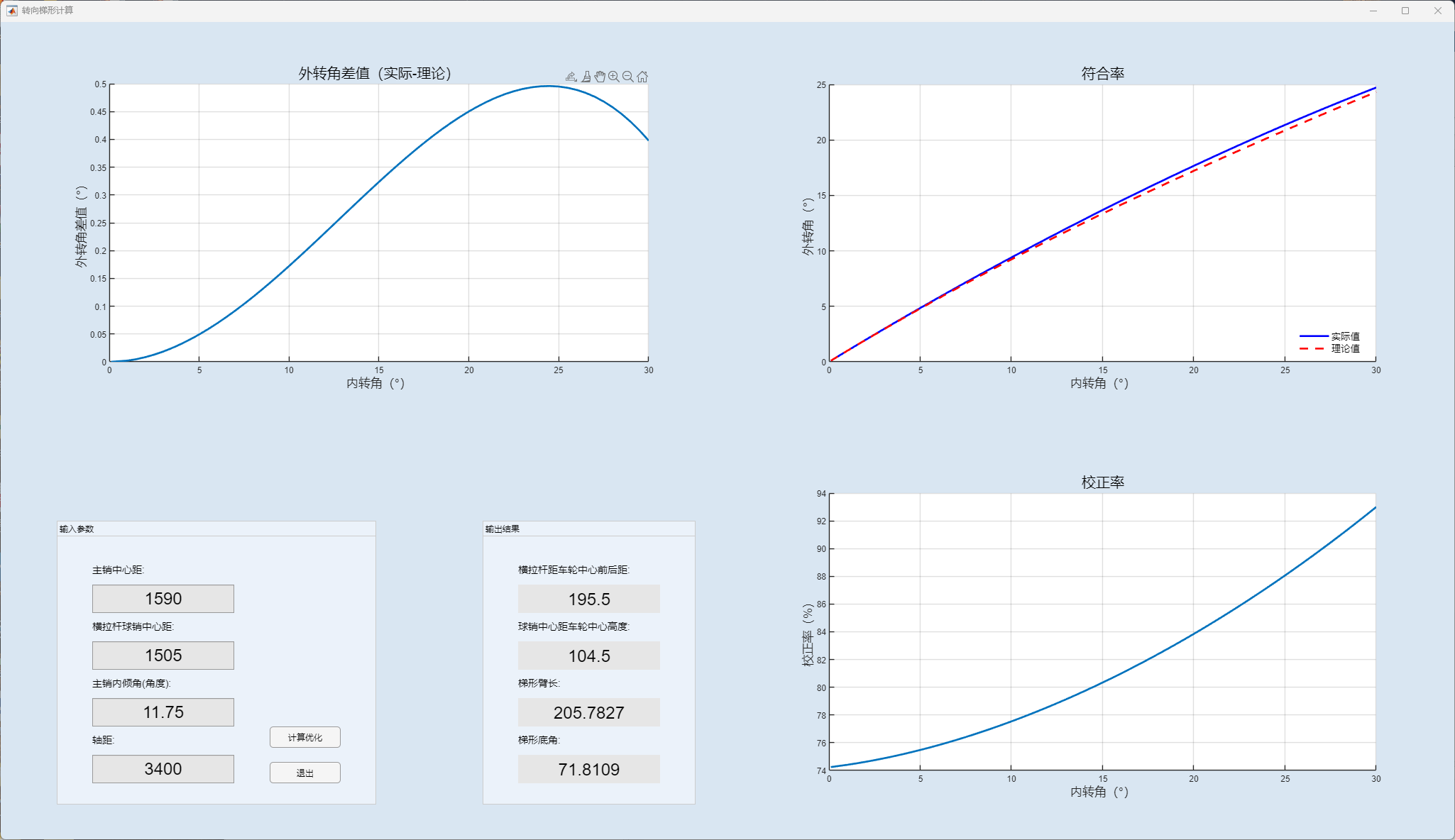
通过输入主销中心距、横拉杆球销中心距、主销内倾角及轴距,就能计算优化合适的梯形臂长和梯形底角,当前设计外转角的差值在-0.5到0.5度之间,校正率在70%到100%之间。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 7
7 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)