第21届智能车竞赛人工智能视觉组比赛细则
- 第二十一届全国大学生智能汽车竞赛比赛规则
- 第21届智能汽车竞赛 | 智能视觉组虚拟游戏系统
- 第21届全国大学生智能汽车竞赛提问与回答:人工智能视觉组别
- 第21届智能车竞赛-智能视觉组规则修改优化
- 第21届智能汽车竞赛人工智能视觉组数据集发布 及AprilTag支架公布
01 比赛模式
一、比赛简介
智能视觉组要求参赛队伍制作一辆可以在平面比赛场地内自由运动的车模。车模在场地内的位置、方向是由比赛系统根据车模上的标记目标板来确定。车模上放置有普通的手机或无线投屏器,屏幕上显示比赛虚拟现实仿真系统投影的实时动态图像。其中包括有比赛场地的全局图像和车模第一视角的图像。车模通过完成虚拟游戏任务来完成比赛。可参考视频演示说明进行直观的了解。
▲ 图1.1.1 比赛环境示意图
二、车模结构与微控制器
1、车模要求
-
车模型号要求:允许使用B、C、F、G、M、H、Y、Z成品车模。
-
车模尺寸要求:车模作品及其附属物必须在地面的投影需要在 35厘米×35厘米 范围内。 对于车模高度没有要求, 但是, 需要能够在车模上水平放置一块 方位标识牌, 标识牌最高不超过 15厘米(±0.5厘米), 而且上方没有折叠。
-
固定车模方案:方便比赛时使用统一的车模方向标识牌,方便系统稳定的进行识别。
(1) 车模标识牌采用可磁吸设计,两铁片中心间距20cm(±0.2cm)。
(2) 车模标识牌的高度由“≤15cm”修改为固定值“15cm(±0.5cm)”。
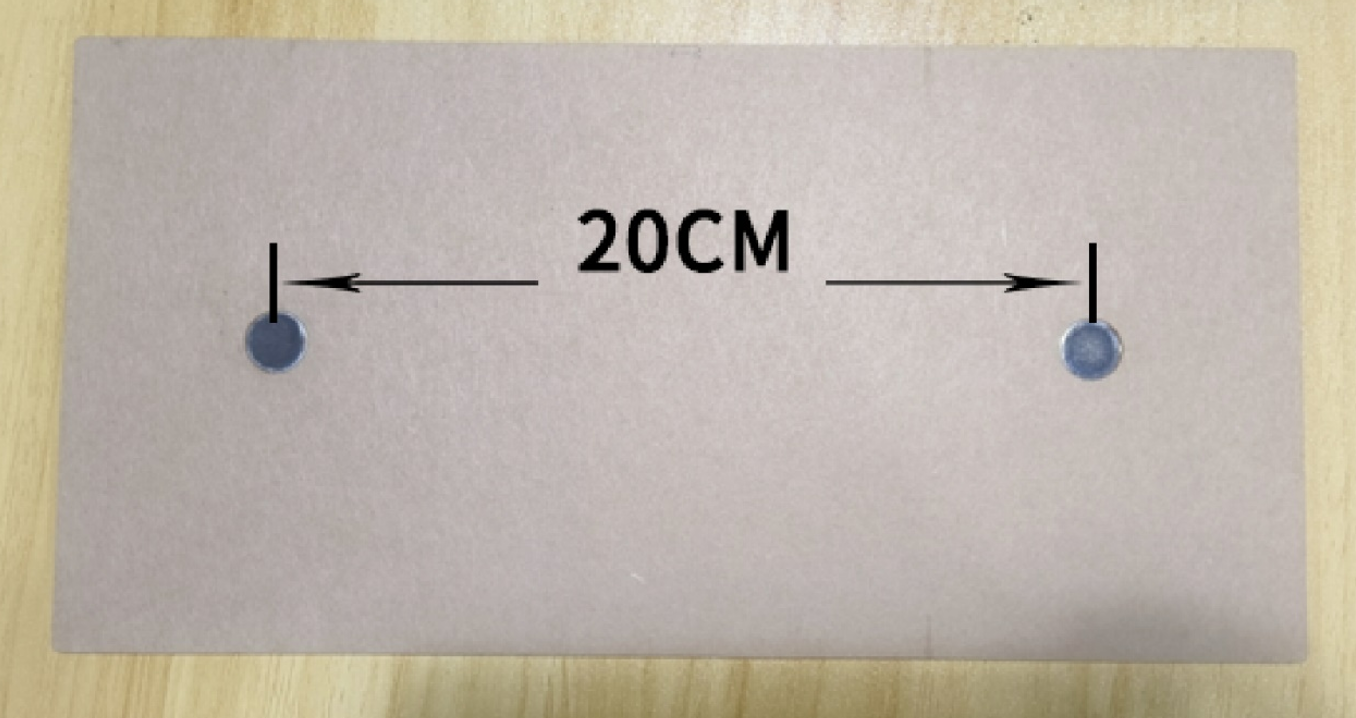
▲ 图1.2.1 车模下面吸附车牌永磁铁距离
由于车模本身未作统一,参赛选手需根据所选车模,按照上述尺寸要求自行制作对应的支架并预装磁铁。比赛现场将提供官方车模标识牌,供选手磁吸安装到各自的车模作品上。
车模标识牌和车模之间应当按要求固定,不能有相对位置的变化,不能转动。
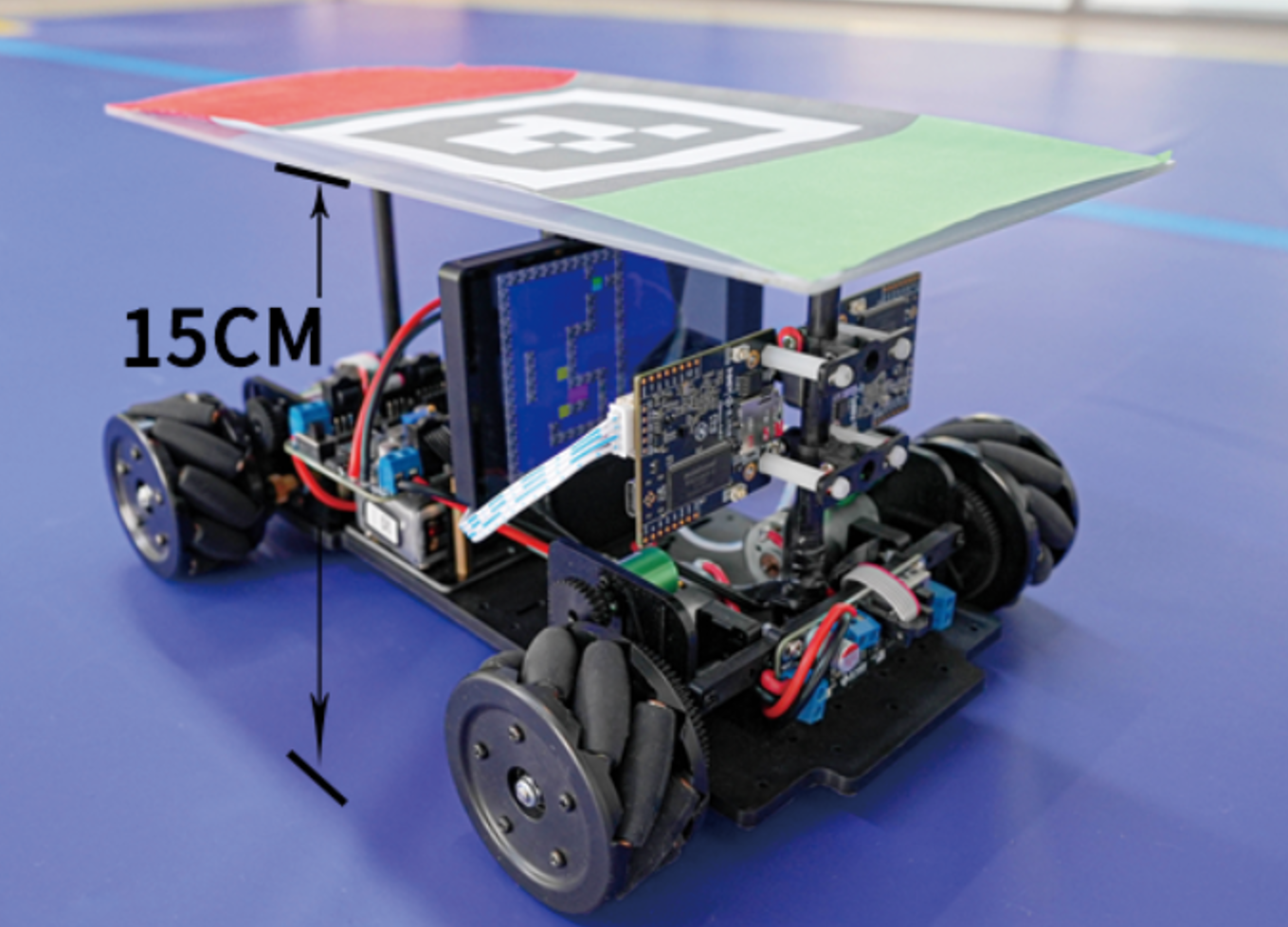
▲ 图1.2.2 车模上方安装防伪标识牌示意图
-
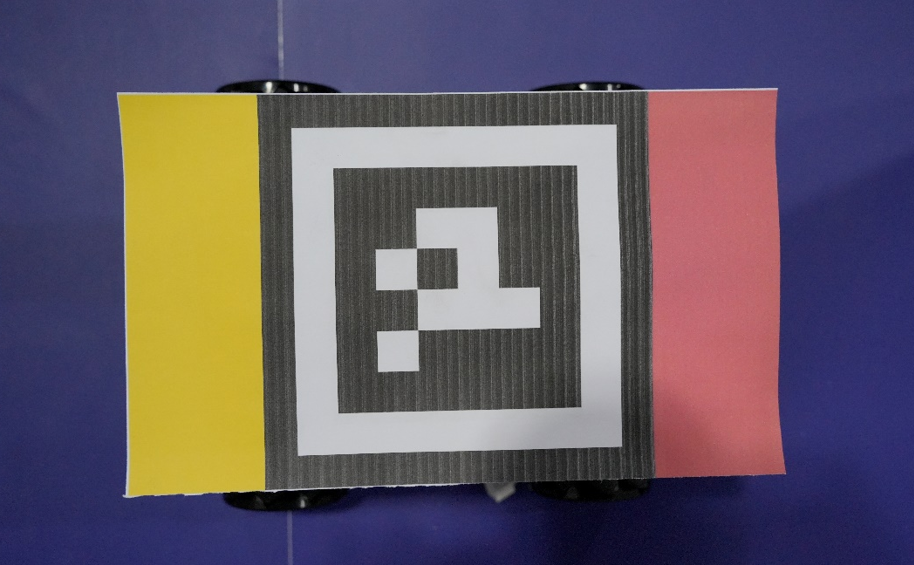
方位标识标牌: 标识牌是为了能够在全局摄像头中定位车模方向、位置以及车模编号。 它是一个30×15厘米的长方形标志,标志由红色矩形、 Apriltag码 、灰绿矩形组成,Apriltag码为TAG16H5系列, 根据比赛需要, 其中数字为01-05, 缺省情况下使用数字1,如下图所示:
-
灰绿色颜色:RGB(90,179,89) CMYK(65,3,81,0)
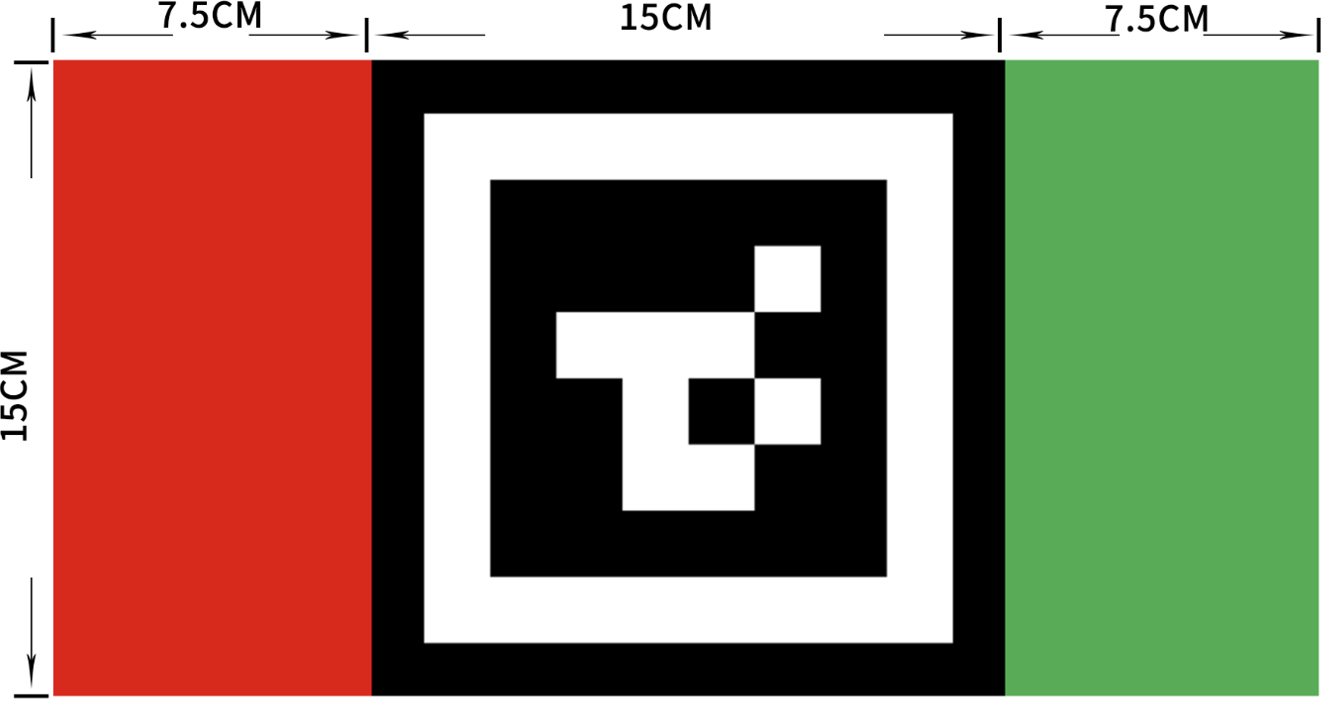
▲ 图1.2.3 车模标识牌结构
2、微控制器以及图像处理平台
限定使用NXP公司的MCU做为小车的主控. 推荐使用i.MXRT系列MCU。含MCU的图像处理平台限定使用基于NXP公司微控制器的OpenART、OpenART Plus、MCXVision、MV5-RT/OMV-RT模块。普通传感器遵循智能车竞速组总则。
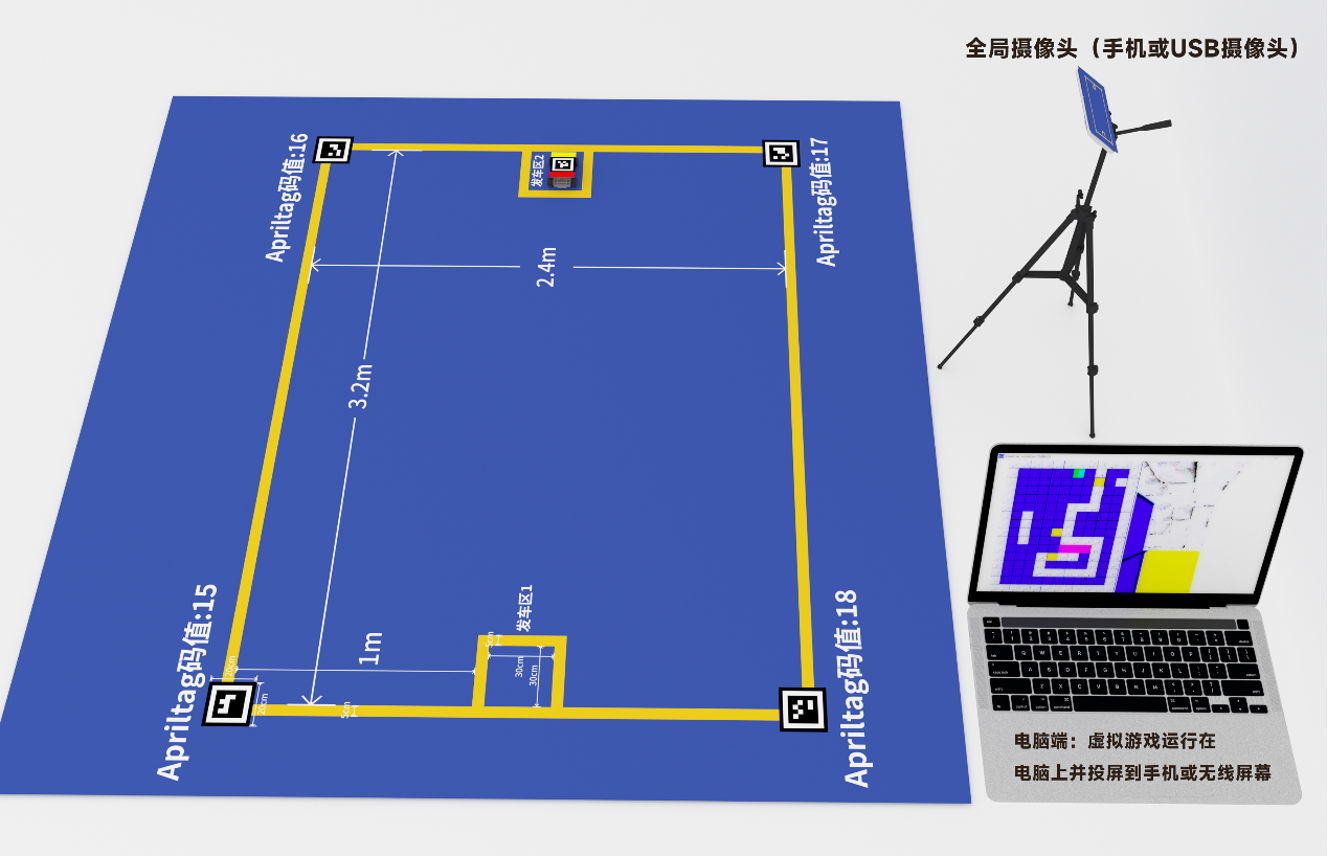
三、比赛场地
场地大约为3.2×2.4米(与320×240图片比例一致),使用宽度为5厘米的黄色布基胶带贴在场地边缘,示意车模可活动范围。需要确保黄色胶带内的区域有3.2×2.4米。
四个角落会贴上数字为15、16、17、18 的Apriltag码,用于系统自动定位场地位置并对全局进行逆透视校正。
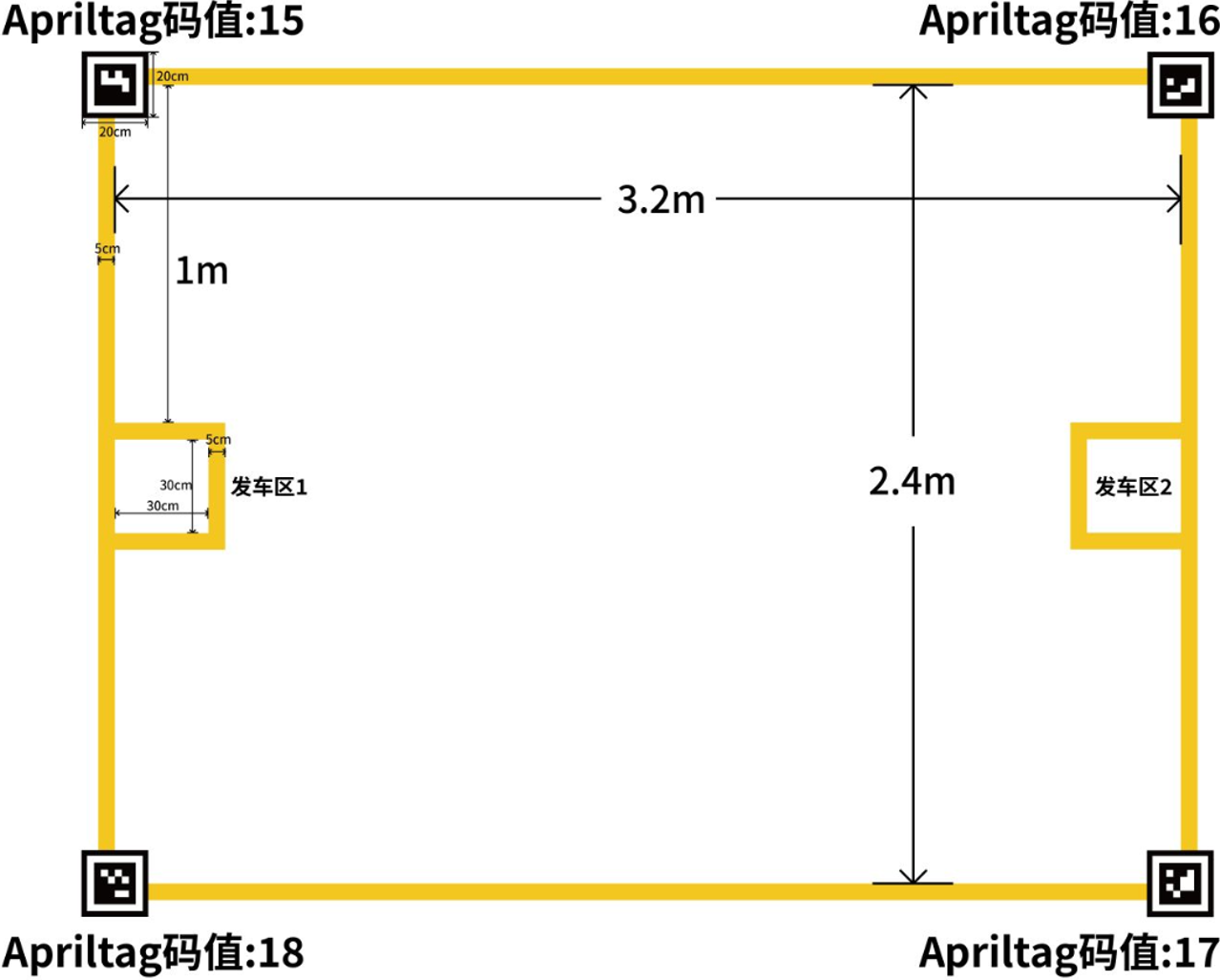
▲ 图1.3.1 比赛场地尺寸以及定位Apriltag示意图
场地上的AprilTag定位码也相应抬高至15cm,与车辆识别码同高度。
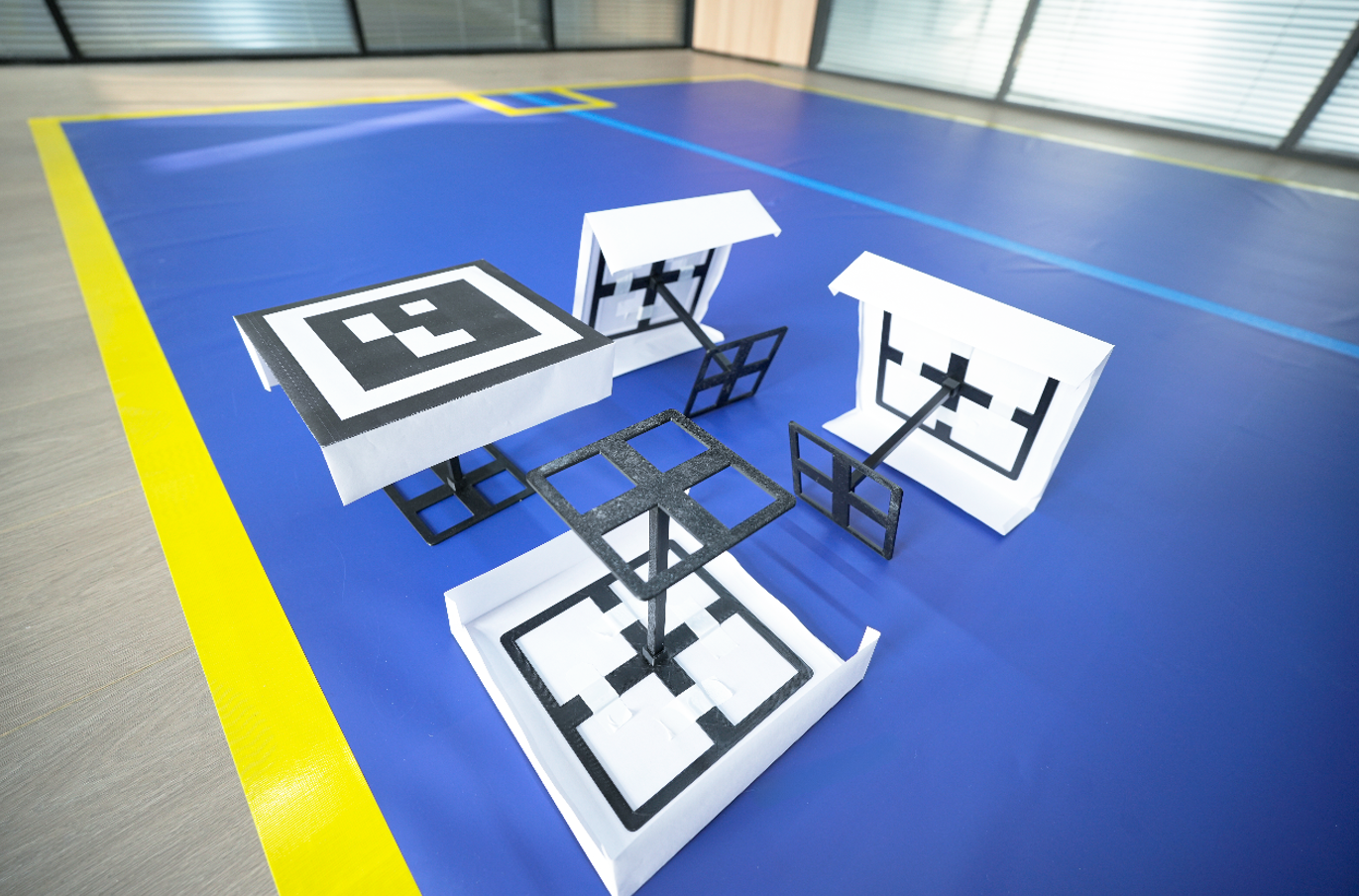
▲ 图1.3.2 AprilTag码支架示意图,后面会公布支架3D打印文件

▲ 图1.3.3 场地内放置 AprilTag码示意图
四、竞赛任务(推箱子:暂定)
智能视觉采用虚实结合、硬件在环的比赛矿建。 在全新的比赛模式下,竞赛内容主要是由 虚拟现实仿真 软件决定。 根据不同比赛阶段可以设定多种比赛任务。 下面以 推箱子任务 为例,说明竞赛任务。
1、推箱子比赛任务
本次比赛内容来自于推箱子游戏的演变,按照规则将全部箱子推到目的地即为完成比赛任务,游戏难度和要求会随着关卡的提高而递增,比
大家玩过的纯推箱子游戏有更多的要求,具体规则如下:
1、制作一辆小车从发车区1或发车区2出发,成功发车后,系统自动开始计时。
2、小车上安装无线屏幕,小车通过摄像头看屏幕显示的内容来获取虚拟游戏画面,包括虚拟环境的俯视图以及小车的第一视角图像。
3、场地中设定有多个需要推动箱子抵达的目的地,且有与目的地同等数量的可移动箱子,需要将可移动箱子按照要求推到目的地箱子所在位置,完成后可移动箱子和目的地会同时消失(避免重复推动和游戏逻辑的难以实现)。
4、小车的虚拟位置不可以越过黑灰色的围墙,在场地内如果小车真实的坐标已经穿过围墙,虚拟图像会一直保持未穿过的位置,最终会导致小车无法获取到正确的自身坐标。小车只能从上次离开围墙的附近回到游戏中系统才再次认可并继续刷新小车的实时位置到虚拟图像中,如果小车直接穿过外围的围墙,则比赛自动结束。
5、所有箱子全部消失,或者剩下的箱子已经在角落无法推动,或小车越过外围围墙,这三种情况触发其一则计时停止,运行时间加罚时作为比赛用时。
6、场地内可能出现炸弹元素,炸弹可以将场地中间的围墙炸掉,使得小车的运动路线可以更短,但最外围一圈围墙无法炸掉。
7、为了应对不同的比赛阶段,计划了三种难度的游戏供选择,包含有纯推箱子、按箱子上的图片分类推箱子等不同关卡。
2、虚拟现实元素说明
在俯视视角下,各个虚拟元素的大小颜色规定如下:
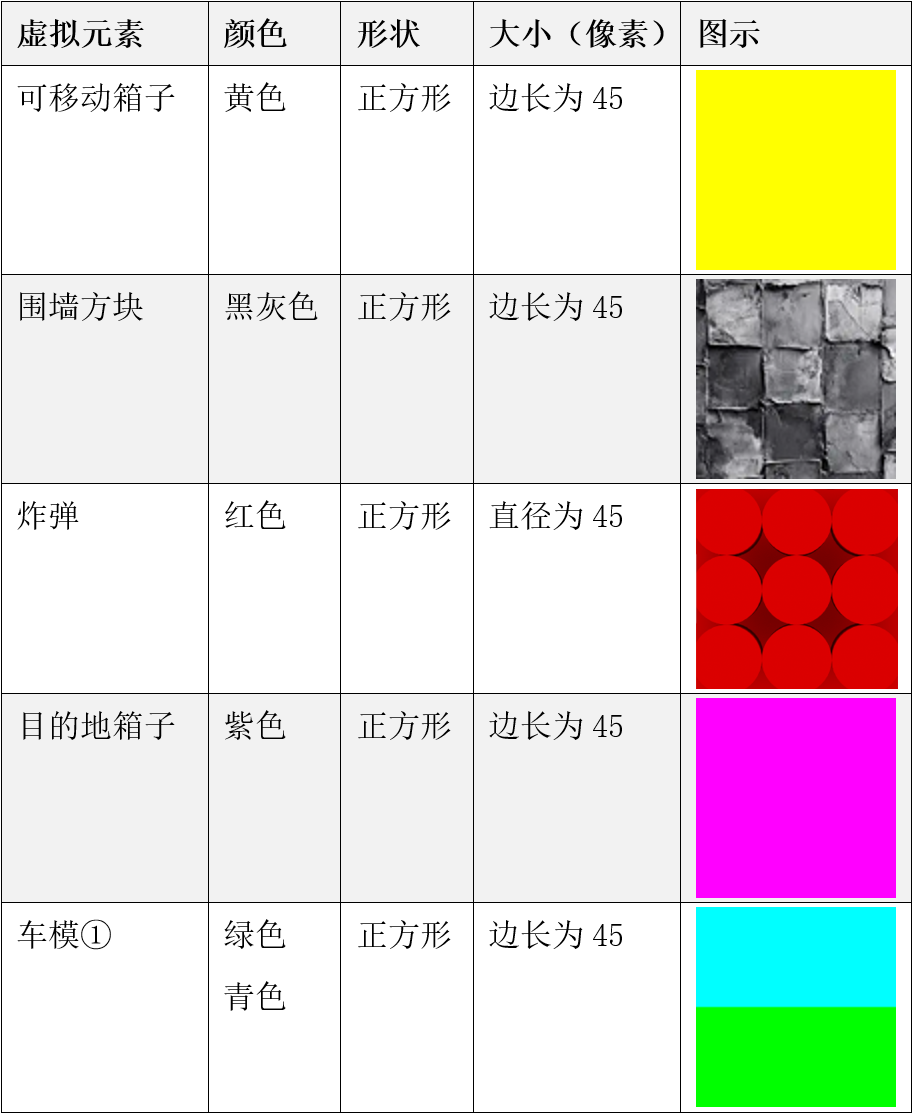
▲ 图1.4.1 虚拟元素一览表
- 注①:车模颜色采用两个色块,目的是为了使得小车能通过色块找到自身位置的同时,也能根据两个色块位置来判断自身的车头的方向。由于两个颜色是属于比较相近的颜色,小车如果不需要做车头方向的判断,则可以对两个颜色设置同一个检测阈值,然后同时进行检测,从而提高检测的速度。
3、虚拟游戏
为了应对不同的比赛阶段,计划了多种难度的虚拟游戏在不同比赛阶段实施。由于所有东西都是虚拟生成的,因此后续如果需要更改游戏玩法,或者添加不同的元素都非常方便。
场地具有不同的元素,可以通过目标检测、分类模型、色块识别等方式进行检测。
根据游戏规则和全局视角的便捷性,选手可以自行编写路径优化算法或者基于强化学习的方式训练一个模型来指挥小车运动,让行进路线更优化。
由于场地并不大,目标也不会太大,因此对车模的控制精度要求会较高。
(1)传统推箱子
通过颜色识别将可移动箱子推动到目的地即可,将所有箱子推至目的地便可完成比赛。
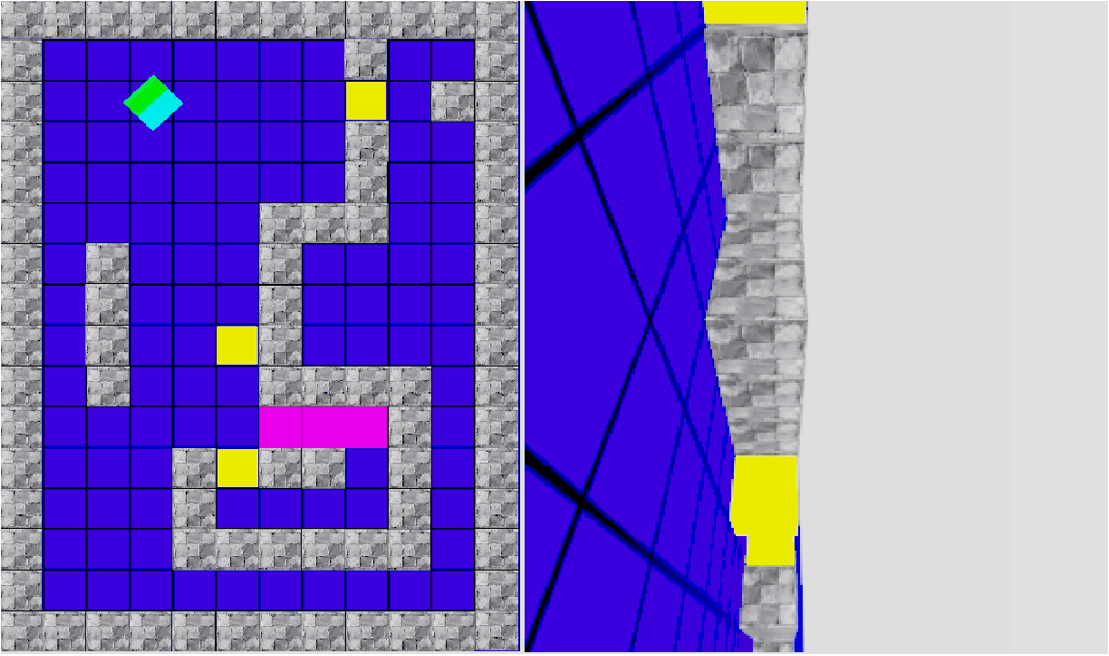
▲ 图1.4.2 车载屏幕显示游戏全景和第一视角示意图
(2)按图片分类推箱子
将动画卡通形象的图片贴在虚拟的可推动箱子侧立面,不同的图像需要推动到数字为 0-9 的目的地位置,图像和数字的对应关系如下表:

▲ 图1.4.3 数字与内容对应关系表
在方案一的基础上,将可移动的箱子四周贴上需要识别的内容,同时将目的地箱子四周也贴上数字,箱子的顶部依然保留之前的颜色,仅在四周贴上对应的图案,四周的图片可能不是同一张图片,但一定是同一类型的。在推箱子的时候,需要通过识别可移动箱子上的图案,以及目的地箱子上的数字,两者需要对应才算成功,具体对应关系如上方表格中说明。
为了降低难度,在布置地图的时候,会将所有的目的地箱子并列为一排放置,这样小车便于一次性查看所有箱子上的数字内容,记下位置后,将贴图的箱子推到对应的目的地。
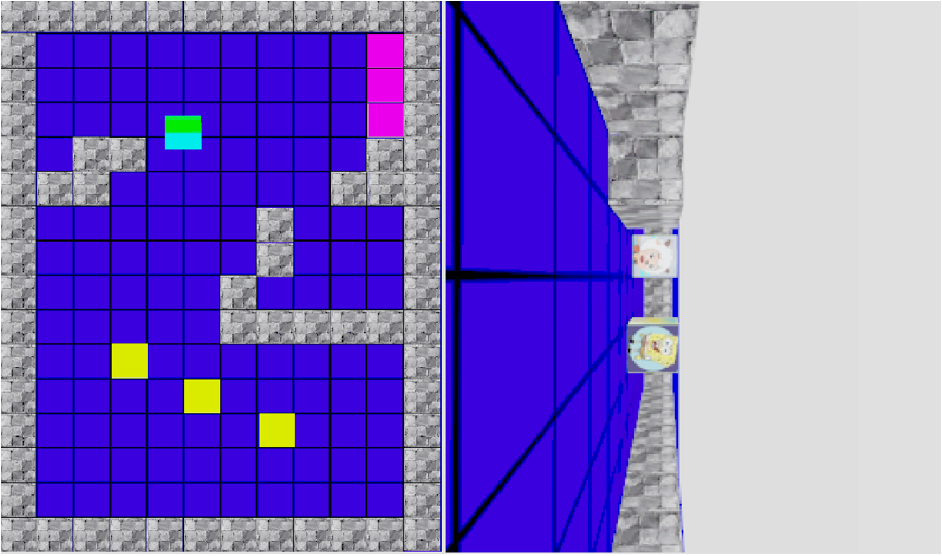
▲ 图1.4.4 贴图的箱子对应的场景
(3)按图片分类推箱子升级
在方案二基础上,将所有的目的地箱子都是随机摆放的,需要小车自行前往目的地箱子所在位置,然后识别箱子上的数字,最后再去推动可移动的箱子。
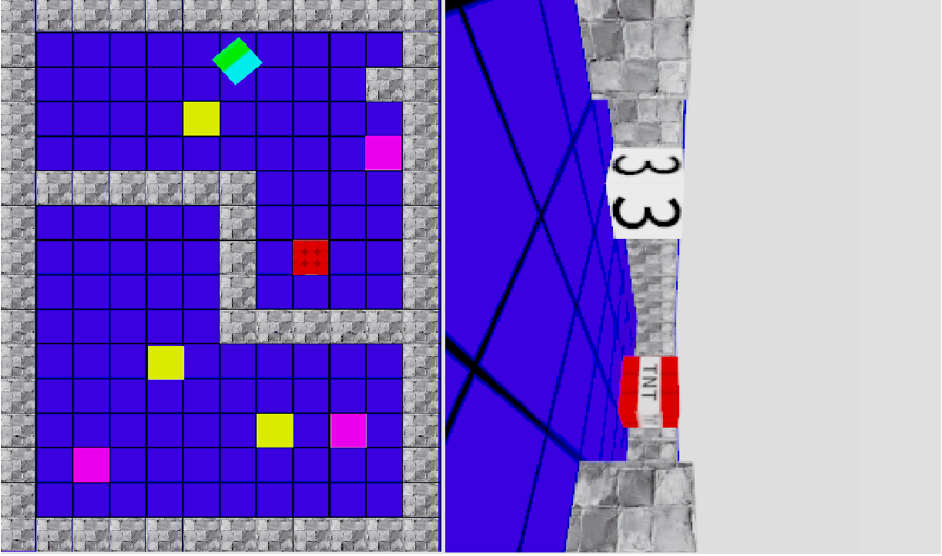
▲ 图1.4.5 按图片分类推箱子升级
(4)以上三种模式闯关
在以上三种任意的方案中,都可以增加闯关模式,可以让比赛分为多个关卡,每个关卡的地图不一样,难度不一样。 每一个关卡结束之后,小车回到出发区自动触发下一个关卡开始。
(5)对抗模式
在决赛阶段如果有条件时,可以采用对抗的方式进行比赛,通过在虚拟场地中放置奇数个的可移动箱子,两个队伍从两个发车区同时发车,比拼推箱子数量多者取胜,时间限定在3分钟内。对抗时需要将绿色和青色两种颜色分给两辆车模,车模自行通过动作来判断记录自己的车头方向。
4、罚时
未完成的箱子一个加罚30秒。需要成功将一半及以上的箱子推到目的地,才能取得有效成绩。
02 比赛系统规格
比赛系统不要求参赛队伍制作,可以根据如下公布的系统规格搭建相应的练习测试系统,用于平时的车模作品的调试和训练。 包括有三部分:
(1) 比赛场地和全局定位摄像头;
(2) 车载无线投屏;
(3) 虚拟现实(游戏)软件。
一、比赛场地与全局定位摄像头
比赛过程中, 虚拟现实软件获得车模方位信息依靠室内车模全局定位系统。 可以使用两种不同的设备连接虚拟软件实现。 一种是 USB 高清摄像头, 另外一种使用 普通的手机摄像头。
- 正式比赛:使用USB高清摄像头,从上往下看到整个场地,通过场地的Apriltag码系统自动判断场地位置与逆透视校正。车上放置一张15×15厘米的Apriltag码,车载的Apriltag码包含两个色块,便于系统自动检测小车位置以及方向。
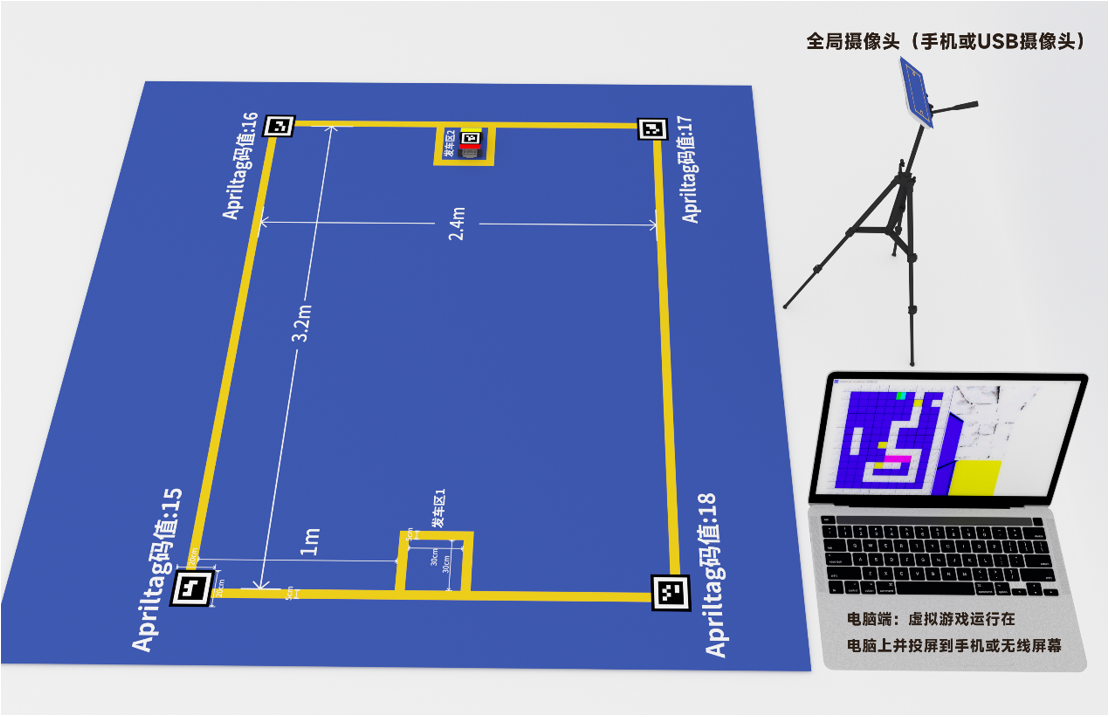
▲ 图2.1.1 比赛场地以及全局摄像头定位系统
- 平时调试:可以使用提供的免费APK软件,将手机作为无线摄像头,给系统输入图像信息。

▲ 图2.1.2 使用普通的手机摄像头实现全局定位
注:需要在小车上安装好图2.1 车模定位标志,才能让全局摄像头识别到车模的位置和方向,正式比赛时需要更换为现场准备好的车模定位标志道具,便于正式比赛的全局摄像头进行标准化识别,所以要求小车在车顶预留好安装位置。
▲ 图2.1.3 车模顶部的方位标识牌
二、虚拟软件屏幕
1、车载无线屏幕
无线屏幕尺寸大约为4英寸,分辨率需要大于720×1080,无线屏幕会显示两个视角下的图像,两个视角分别是俯视角以及小车的第一视角。每个视角的分辨率为720×540。
为了便于参赛队伍进行调试, 使用无线屏幕有两种版本, 一种是组委会统一提供的无线屏幕, 另外一种是使用普通的手机完成无线屏幕投影。 在车模设计中, 需要自行设计一个能够安装无线屏幕的固定机械结构。
- 正式比赛:使用组委会提供的无线屏幕,电脑将两个视角投屏到小屏幕上,供选手小车进行识别。 参赛队伍车模上的无线屏幕如果合规(需确保大家使用的是同一款屏幕,确保分辨率、尺寸大小等一致),比赛时不用拆卸更换,避免位置变化对作品造成影响;

▲ 图2.2.1 车载无线屏幕示意图
- 平时调试:可以使用手机运行提供的免费APK软件,手机就可以实现无线屏幕的功能,将电脑的画面无线投屏到手机上进行显示,供小车使用,无需购买无线投影器。
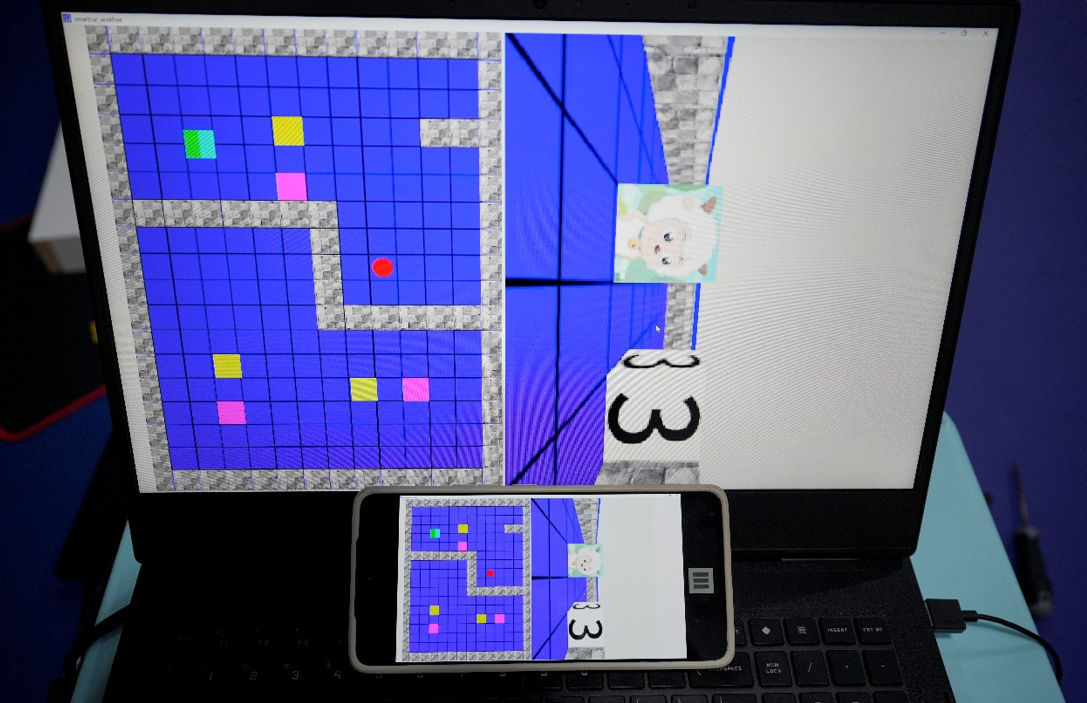
▲ 图2.2.2 手机通过APK软件获取屏幕图片
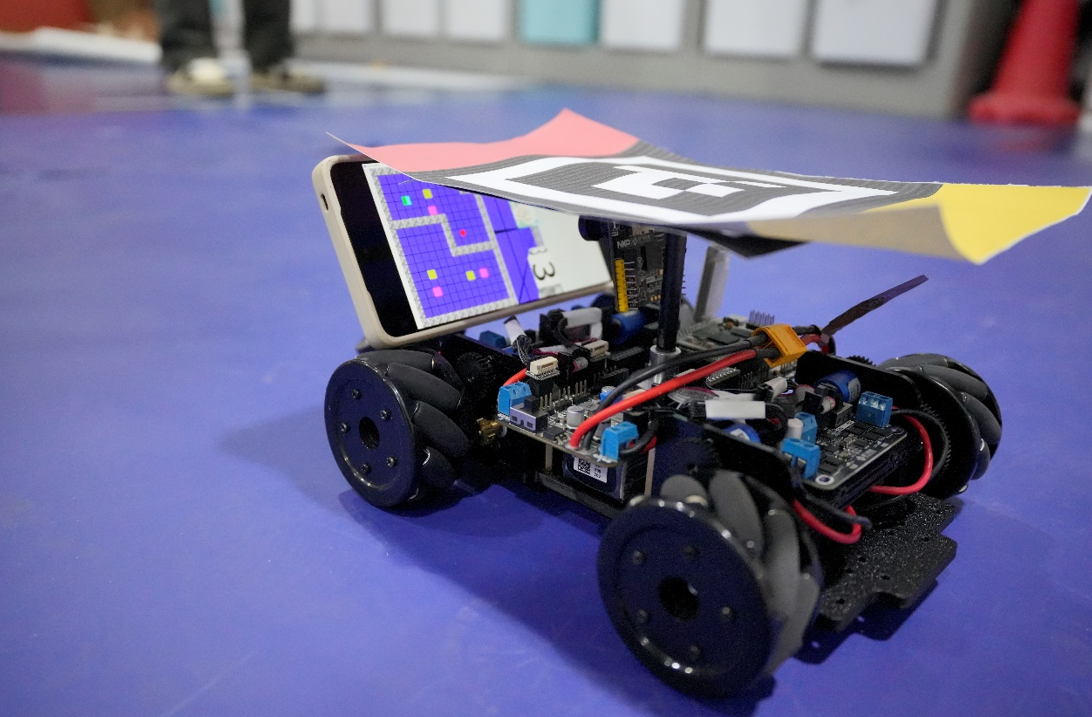
▲ 图2.2.3 车载手机屏幕示意图
2、比赛场地大屏幕
场地上准备一个75寸左右的大屏,来实时的播放当前虚拟场景下的图像信息,也便于选手视频录制时将整个比赛过程和最终比赛时间录制下来,大屏上显示的内容主要供观众和选手查看,所以大屏上的渲染会有所改变,比如车模就会变成一辆车,还可以增加音效,特效,背景音乐等,而不是色块,增加观赏性。
三、虚拟现实(游戏)软件
1、软件功能
比赛上位机虚拟现实(游戏)软件可以免费下载。 软件支持自定义地图,选手自行摆放围墙、目的地箱子、可移动箱子、炸弹的具体位置,箱子上的内容以及数字都可随意设置,从而满足同学们在调试期间的测试需求。同时上位机也会内置一些不同难度的地图供前期调试。
2、软件下载链接【软件正在更新过程中】
上诉中提到的一些APK软件,后续会在下面的链接中进行更新,并提供使用教程文档,便于大家快速使用,预计会在1月初提供。
https://pan.baidu.com/s/1w-RqQvzZ2VuduAzgWPV9tA?pwd=w3f4
- 提取码: w3f4
最终的数据集会在下面的地址中进行更新(包含目标图片,数字图片)。
https://pan.baidu.com/s/1Ir2KopJUmcbrbpqg3ziFwg?pwd=jf8g
-
提取码: jf8g
03 演示视频
一、推箱子演示
智能视觉组演示
智能视觉比赛终于闭环了
智能视觉——推箱子的测试视频
■ 相关文献链接:
(1) 《 第21届智能车竞赛飞檐走壁组比赛赛道制作说明 》
(2) 《 第21届智能车竞赛疯狂电路组比赛赛道制作说明与计分标准 》
(3) 《 第21届智能车竞赛蚂蚁搬家组搬运任务说明 》
(4) 《 第21届智能车竞赛飞跃雷区组车模与比赛场地说明 》
(5) 《 第21届智能车竞赛走马观碑组比赛场地与目标板说明 》
(6) 《 第21届智能车竞赛雁过留痕组比赛场地与紫外线感光片说明 》
(7) 《 第21届智能车竞赛人工智能视觉组比赛细则 》
(8) 《 第21届智能车竞赛人工智能完模比赛细则 》
(9) 《 第21届智能车竞赛卡丁快跑组比赛科目细则 》
(10) 《 第21届智能车竞赛轮腿穿越组比赛科目细则 》
(11) 《 第21届智能车竞赛单车定向组比赛科目细则 》
(12) 《 第21届全国大学智能汽车竞赛制作材料白名单与黑名单 》
(13) 竞赛车模平台及其配件
为了进一步方便参赛队伍的车模器材充分应用,灵活选择车模结构方案, 大赛制定车模供应商(博思威龙、北京科宇)的相同尺寸舵机、电机可以交换使用。
1) 第21届全国大学生智能汽车竞赛 | 北京科宇公司车模清单
2) 第21届全国大学生智能汽车竞赛 | 博思威龙车模清单
● 相关图表链接:

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 67
67 0
0- 0



 已为社区贡献92条内容
已为社区贡献92条内容

所有评论(0)