在ubuntu 20.04 部署yolov5,并使用ros实现目标检测。
一、yolov5 介绍
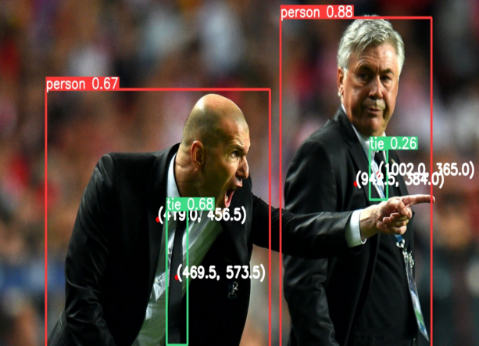
YOLOv5是一个先进、快速且易于使用的实时目标检测模型,广泛应用于各种领域。它是由Ultralytics团队基于PyTorch框架开发的,相比于之前的YOLO版本(如YOLOv3、YOLOv4),YOLOv5在性能、精度和易用性上都有一些改进。
主要特点:
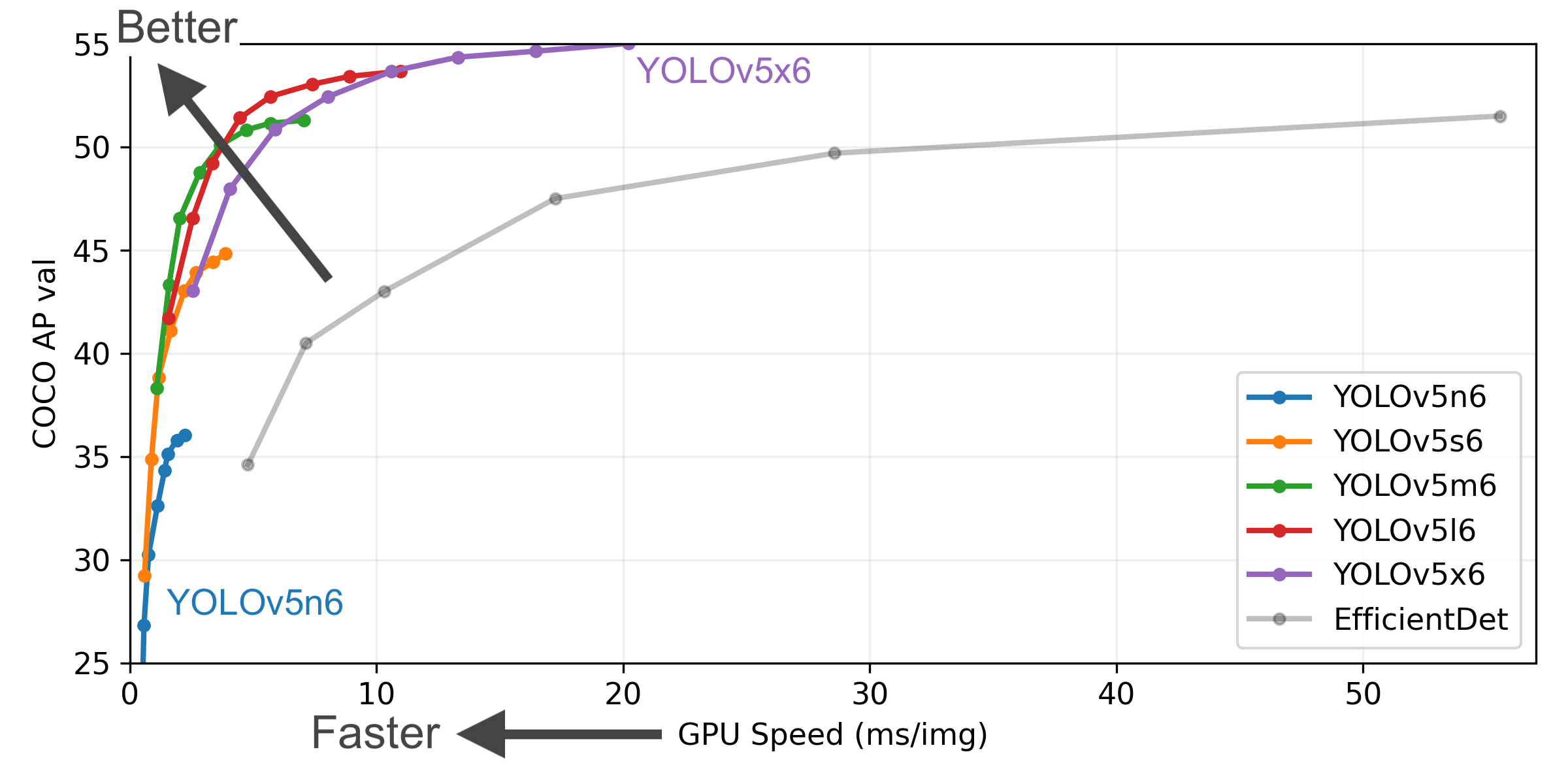
1.高效性和实时性:YOLOv5通过优化网络结构和推理过程,在高效性和实时性方面表现优异,适用于实时目标检测任务,如视频监控、自动驾驶等。
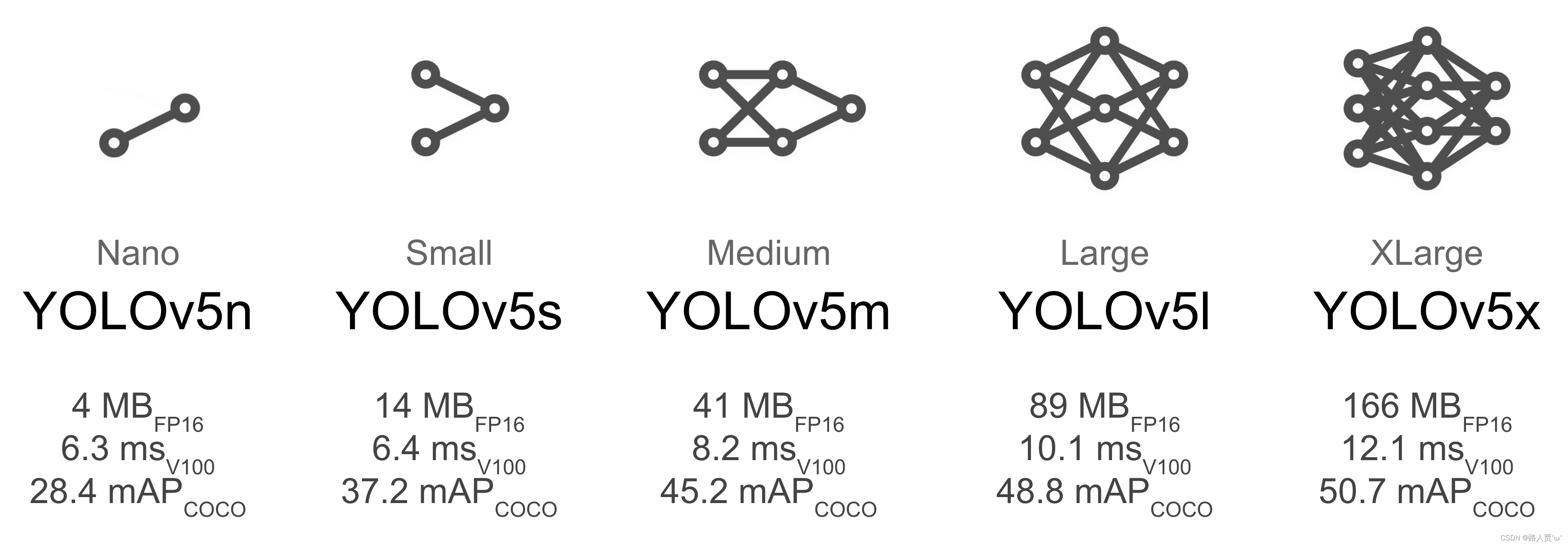
2.多种模型尺寸:YOLOv5提供了多个模型版本(如YOLOv5s、YOLOv5m、YOLOv5l、YOLOv5x),可以根据硬件性能和精度需求选择不同的模型。
3.支持多种数据集格式:YOLOv5支持多种数据集格式,包括COCO、VOC等,可以方便地进行不同任务的数据训练。
4.增强的数据增广技术:YOLOv5引入了多种数据增广方法(如随机裁剪、颜色抖动等)来提高模型的泛化能力。
5.轻量级模型 (Lightweight Models):YOLOv5 提供了非常小的模型版本(如 yolov5n, yolov5s),这些模型文件体积小,计算量低,非常适合部署在资源受限的设备上,如移动设备或嵌入式系统(边缘计算)。
github网址:
GitHub - ultralytics/yolov5: YOLOv5 🚀 in PyTorch > ONNX > CoreML > TFLite
二、安装部署yolov5
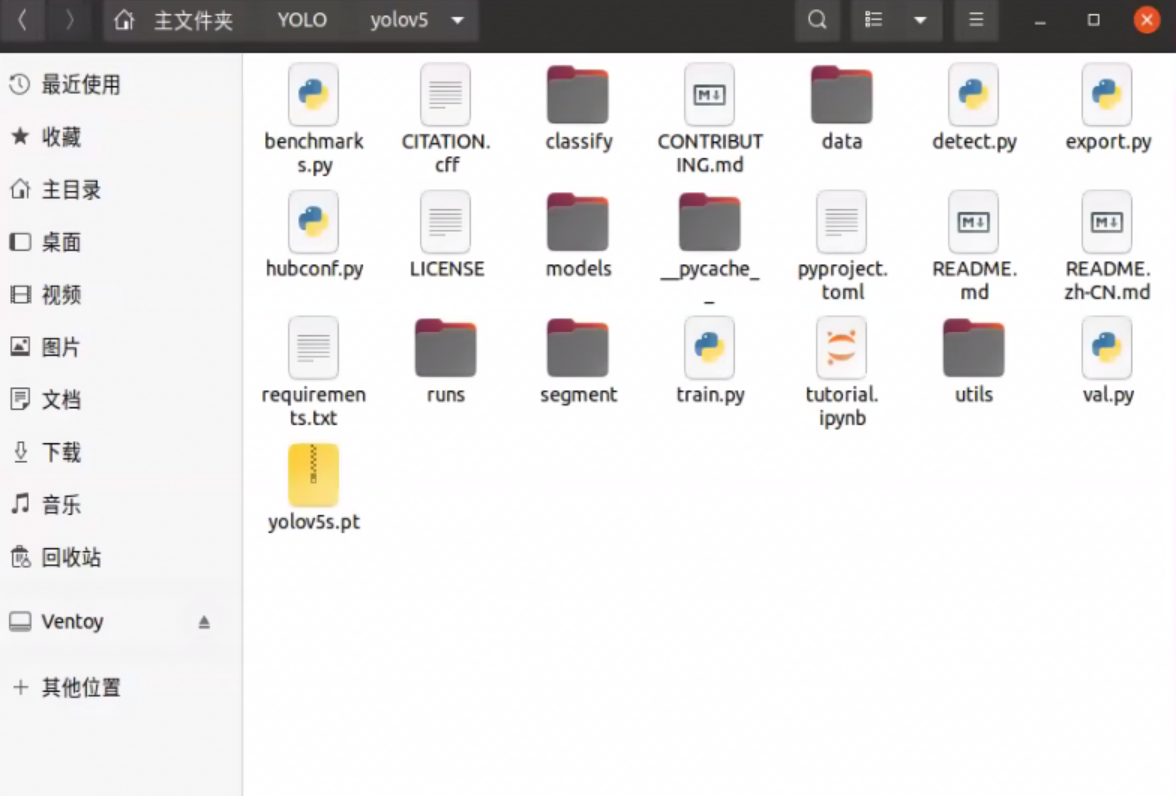
创建文件夹YOLO,克隆仓库并在 Python>=3.8.0 环境中安装依赖项软件包,确保你安装了PyTorch>=1.8。
# Clone the YOLOv5 repository
git clone https://github.com/ultralytics/yolov5
# Navigate to the cloned directory
cd yolov5
# Install required packages
pip install -r requirements.txt源码克隆到文件夹:
安装依赖项软件包:
安装完成:
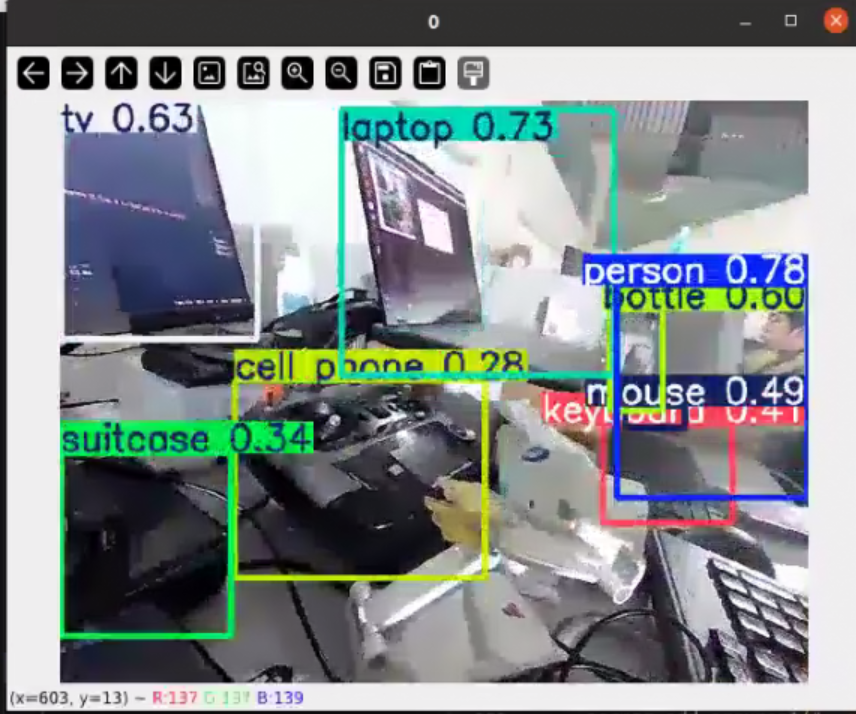
找到detect.py文件运行,即可
三、在ubuntu系统通过ros调用yolov5进行识别
方法一(创建rospy程序调用yolov5进行识别):
安装usb-cam包:
sudo apt install ros-noetic-usb-cam测试:
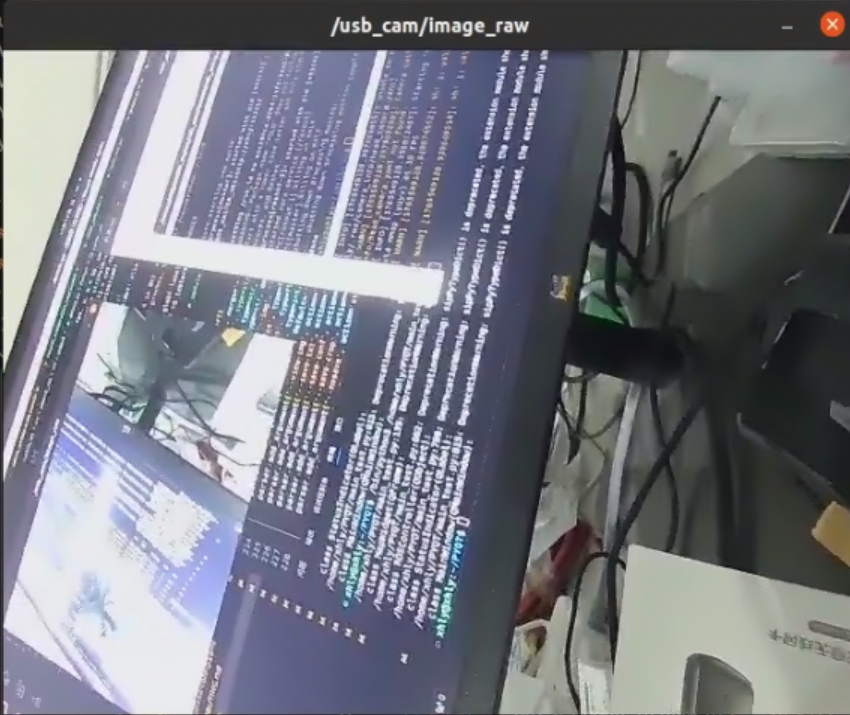
roslaunch usb_cam usb_cam-test.launch
获取到话题图像:
进入 工作空间src 创建yolov5_ ros 包并添加依赖:
catkin_create_pkg yolov5_ros roscpp rospy std_msgsyolov5_node.py:
import rospy
from sensor_msgs.msg import Image
from cv_bridge import CvBridge, CvBridgeError
import cv2
import numpy as np
import torch
from yolov5_ros.msg import Detection
from geometry_msgs.msg import Point
import threading
class YoloV5Node:
def __init__(self):
# 初始化 ROS 节点
rospy.init_node('yolov5_node')
self.bridge = CvBridge()
# 加载模型(确保使用 GPU)
self.model = torch.hub.load(
"/home/xhly/catkin_ws/src/yolov5_ros/scripts/yolov5",
"custom",
source='local',
path='/home/xhly/catkin_ws/src/yolov5_ros/scripts/yolov5s.pt'
)
# ====== 关键修改1:设置只检测人(COCO类别0) ======
self.model.classes = [0] # COCO数据集中0对应"person"
self.model.eval() # 设置模型为评估模式
if torch.cuda.is_available():
self.model = self.model.cuda() # 如果有 GPU,将模型转移到 GPU
# 订阅图像话题
self.image_sub = rospy.Subscriber("/camera/color/image_raw", Image, self.image_callback)
# 创建发布检测结果的发布器
self.detection_pub = rospy.Publisher('/detections', Detection, queue_size=10)
self.position_pub = rospy.Publisher('/object_positions', Point, queue_size=10)
def image_callback(self, data):
try:
# 将 ROS 图像消息转换为 OpenCV 图像
cv_image = self.bridge.imgmsg_to_cv2(data, "bgr8")
# 执行目标检测(对调整大小后的图像进行处理)
results = self.model(cv_image) # 执行目标检测
# results = results.xyxy[0] # 获取结果
# results = results[results[:, 4] > 0.7] # 过滤置信度低于 0.5 的框
# 处理检测结果
self.publish_results(results, cv_image)
# 在窗口显示图像
self.display_frame(cv_image)
except CvBridgeError as e:
print(e)
def publish_results(self, results, cv_image):
# 将结果转换为 ROS 格式并发布
detections = []
for *xyxy, conf, cls in results.xyxy[0]:
x_min, y_min, x_max, y_max = xyxy
class_name = results.names[int(cls)]
# 绘制检测框
cv2.rectangle(cv_image, (int(x_min), int(y_min)), (int(x_max), int(y_max)), (255, 0, 0), 2) # 红色框
cv2.putText(cv_image, f'{class_name} {conf:.2f}', (int(x_min), int(y_min)-10),
cv2.FONT_HERSHEY_SIMPLEX, 0.9, (255, 0, 0), 2)
# 创建检测信息消息
detection = Detection()
detection.id = len(detections) + 1
detection.class_name = class_name
detection.confidence = float(conf)
detection.x_min = float(x_min)
detection.y_min = float(y_min)
detection.x_max = float(x_max)
detection.y_max = float(y_max)
detection.x_cen = float((x_max-x_min)/2 + x_min) # 图像中心 x 坐标
detection.y_cen = float((y_max-y_min)/2 + y_min) # 图像中心 y 坐标
detections.append(detection)
# 发布物体位置(在 3D 空间中的位置)
position = Point()
# position.x = 320 - detection.x_cen # 相对 X 位置(根据分辨率调整)
# position.y = 240 - detection.y_cen # 相对 Y 位置(根据分辨率调整)
position.x =detection.x_cen # 相对 X 位置(根据分辨率调整)
position.y =detection.y_cen # 相对 Y 位置(根据分辨率调整)
position.z = 0
self.position_pub.publish(position)
# 发布所有检测结果
for detection in detections:
self.detection_pub.publish(detection)
def display_frame(self, cv_image):
# 在窗口显示处理后的图像
cv2.imshow("YOLOv5 Detection", cv_image)
cv2.waitKey(1) # 按键时保持窗口刷新
if __name__ == '__main__':
try:
node = YoloV5Node()
rospy.spin()
except rospy.ROSInterruptException:
pass定义Detection.msg:
# Detection.msg
uint32 id
string class_name
float32 confidence
float32 x_min
float32 y_min
float32 x_max
float32 y_max
float32 x_cen
float32 y_cen方法二(直接修改detect.py输出得到识别信息):
detect.py:
# Ultralytics YOLOv5 🚀, AGPL-3.0 license
"""
Run YOLOv5 detection inference on images, videos, directories, globs, YouTube, webcam, streams, etc.
Usage - sources:
$ python detect.py --weights yolov5s.pt --source 0 # webcam
img.jpg # image
vid.mp4 # video
screen # screenshot
path/ # directory
list.txt # list of images
list.streams # list of streams
'path/*.jpg' # glob
'https://youtu.be/LNwODJXcvt4' # YouTube
'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP stream
Usage - formats:
$ python detect.py --weights yolov5s.pt # PyTorch
yolov5s.torchscript # TorchScript
yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn
yolov5s_openvino_model # OpenVINO
yolov5s.engine # TensorRT
yolov5s.mlpackage # CoreML (macOS-only)
yolov5s_saved_model # TensorFlow SavedModel
yolov5s.pb # TensorFlow GraphDef
yolov5s.tflite # TensorFlow Lite
yolov5s_edgetpu.tflite # TensorFlow Edge TPU
yolov5s_paddle_model # PaddlePaddle
"""
import argparse
import csv
import os
import platform
import sys
from pathlib import Path
import torch
import rospy
from std_msgs.msg import Header
from sensor_msgs.msg import Image
from visualization_msgs.msg import Marker, MarkerArray
from cv_bridge import CvBridge
import torch
import cv2
import numpy as np
from yolov5_ros.msg import Detection
from geometry_msgs.msg import Point
from visualization_msgs.msg import Marker
FILE = Path(__file__).resolve()
ROOT = FILE.parents[0] # YOLOv5 root directory
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT)) # add ROOT to PATH
ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
from ultralytics.utils.plotting import Annotator, colors, save_one_box
from models.common import DetectMultiBackend
from utils.dataloaders import IMG_FORMATS, VID_FORMATS, LoadImages, LoadScreenshots, LoadStreams
from utils.general import (
LOGGER,
Profile,
check_file,
check_img_size,
check_imshow,
check_requirements,
colorstr,
cv2,
increment_path,
non_max_suppression,
print_args,
scale_boxes,
strip_optimizer,
xyxy2xywh,
)
from utils.torch_utils import select_device, smart_inference_mode
@smart_inference_mode()
def run(
weights=ROOT / "yolov5s.pt", # model path or triton URL
source=ROOT / "data/images", # file/dir/URL/glob/screen/0(webcam)
data=ROOT / "data/coco128.yaml", # dataset.yaml path
imgsz=(680, 680), # inference size (height, width)
conf_thres=0.25, # confidence threshold
iou_thres=0.45, # NMS IOU threshold
max_det=1000, # maximum detections per image
device="", # cuda device, i.e. 0 or 0,1,2,3 or cpu
view_img=False, # show results
save_txt=False, # save results to *.txt
save_format=0, # save boxes coordinates in YOLO format or Pascal-VOC format (0 for YOLO and 1 for Pascal-VOC)
save_csv=False, # save results in CSV format
save_conf=False, # save confidences in --save-txt labels
save_crop=False, # save cropped prediction boxes
nosave=False, # do not save images/videos
classes=None, # filter by class: --class 0, or --class 0 2 3
agnostic_nms=False, # class-agnostic NMS
augment=False, # augmented inference
visualize=False, # visualize features
update=False, # update all models
project=ROOT / "runs/detect", # save results to project/name
name="exp", # save results to project/name
exist_ok=False, # existing project/name ok, do not increment
line_thickness=3, # bounding box thickness (pixels)
hide_labels=False, # hide labels
hide_conf=False, # hide confidences
half=False, # use FP16 half-precision inference
dnn=False, # use OpenCV DNN for ONNX inference
vid_stride=1, # video frame-rate stride
):
# 初始化ROS节点(放在函数开头)
# rospy.init_node('yolov5_detector', anonymous=True)
# ros_pub = ROSPublisher()
#ros部分
source = str(source)
save_img = not nosave and not source.endswith(".txt") # save inference images
is_file = Path(source).suffix[1:] in (IMG_FORMATS + VID_FORMATS)
is_url = source.lower().startswith(("rtsp://", "rtmp://", "http://", "https://"))
webcam = source.isnumeric() or source.endswith(".streams") or (is_url and not is_file)
screenshot = source.lower().startswith("screen")
if is_url and is_file:
source = check_file(source) # download
# Directories
save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run
(save_dir / "labels" if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
# Load model
device = select_device(device)
model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data, fp16=half)
stride, names, pt = model.stride, model.names, model.pt
imgsz = check_img_size(imgsz, s=stride) # check image size
# Dataloader
bs = 1 # batch_size
if webcam:
view_img = check_imshow(warn=True)
dataset = LoadStreams(source, img_size=imgsz, stride=stride, auto=pt, vid_stride=vid_stride)
bs = len(dataset)
elif screenshot:
dataset = LoadScreenshots(source, img_size=imgsz, stride=stride, auto=pt)
else:
dataset = LoadImages(source, img_size=imgsz, stride=stride, auto=pt, vid_stride=vid_stride)
vid_path, vid_writer = [None] * bs, [None] * bs
# Run inference
model.warmup(imgsz=(1 if pt or model.triton else bs, 3, *imgsz)) # warmup
seen, windows, dt = 0, [], (Profile(device=device), Profile(device=device), Profile(device=device))
for path, im, im0s, vid_cap, s in dataset:
with dt[0]:
im = torch.from_numpy(im).to(model.device)
im = im.half() if model.fp16 else im.float() # uint8 to fp16/32
im /= 255 # 0 - 255 to 0.0 - 1.0
if len(im.shape) == 3:
im = im[None] # expand for batch dim
if model.xml and im.shape[0] > 1:
ims = torch.chunk(im, im.shape[0], 0)
# Inference
with dt[1]:
visualize = increment_path(save_dir / Path(path).stem, mkdir=True) if visualize else False
if model.xml and im.shape[0] > 1:
pred = None
for image in ims:
if pred is None:
pred = model(image, augment=augment, visualize=visualize).unsqueeze(0)
else:
pred = torch.cat((pred, model(image, augment=augment, visualize=visualize).unsqueeze(0)), dim=0)
pred = [pred, None]
else:
pred = model(im, augment=augment, visualize=visualize)
# NMS
with dt[2]:
pred = non_max_suppression(pred, conf_thres, iou_thres, classes, agnostic_nms, max_det=max_det)
# Second-stage classifier (optional)
# pred = utils.general.apply_classifier(pred, classifier_model, im, im0s)
# Define the path for the CSV file
csv_path = save_dir / "predictions.csv"
# Create or append to the CSV file
def write_to_csv(image_name, prediction, confidence):
"""Writes prediction data for an image to a CSV file, appending if the file exists."""
data = {"Image Name": image_name, "Prediction": prediction, "Confidence": confidence}
file_exists = os.path.isfile(csv_path)
with open(csv_path, mode="a", newline="") as f:
writer = csv.DictWriter(f, fieldnames=data.keys())
if not file_exists:
writer.writeheader()
writer.writerow(data)
# Process predictions
for i, det in enumerate(pred): # per image
seen += 1
if webcam: # batch_size >= 1
p, im0, frame = path[i], im0s[i].copy(), dataset.count
s += f"{i}: "
else:
p, im0, frame = path, im0s.copy(), getattr(dataset, "frame", 0)
p = Path(p) # to Path
save_path = str(save_dir / p.name) # im.jpg
txt_path = str(save_dir / "labels" / p.stem) + ("" if dataset.mode == "image" else f"_{frame}") # im.txt
s += "{:g}x{:g} ".format(*im.shape[2:]) # print string
gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
imc = im0.copy() if save_crop else im0 # for save_crop
annotator = Annotator(im0, line_width=line_thickness, example=str(names))
if len(det):
# Rescale boxes from img_size to im0 size
det[:, :4] = scale_boxes(im.shape[2:], det[:, :4], im0.shape).round()
# Print results
for c in det[:, 5].unique():
n = (det[:, 5] == c).sum() # detections per class
s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string
# Write results
for *xyxy, conf, cls in reversed(det):
c = int(cls) # integer class
label = names[c] if hide_conf else f"{names[c]}"
confidence = float(conf)
confidence_str = f"{confidence:.2f}"
# 在检测循环中添加:
#ros 部分
x_center = (xyxy[0] + xyxy[2]) / 2
y_center = (xyxy[1] + xyxy[3]) / 2
# print(f"({x_center:.1f},{y_center:.1f})") # 保持原有输出
# 发布ROS消息
coord = Point()
coord.x = 320 - x_center
coord.y = 240 - y_center
coord_pub.publish(coord)
# marker = Marker()
# marker.header.frame_id = "world"
# marker.type = Marker.SPHERE
# marker.scale.x = marker.scale.y = marker.scale.z = 0.7
# marker.color.r = 1.0
# marker.color.a = 1.0
# marker.pose.position.x = 320 - x_center
# marker.pose.position.y = 240 - y_center
# marker.pose.position.x = 3.0
# marker.pose.position.y = 0.0
# marker_pub.publish(marker)
if save_csv:
write_to_csv(p.name, label, confidence_str)
if save_txt: # Write to file
if save_format == 0:
coords = (
(xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist()
) # normalized xywh
else:
coords = (torch.tensor(xyxy).view(1, 4) / gn).view(-1).tolist() # xyxy
line = (cls, *coords, conf) if save_conf else (cls, *coords) # label format
with open(f"{txt_path}.txt", "a") as f:
f.write(("%g " * len(line)).rstrip() % line + "\n")
if save_img or save_crop or view_img: # Add bbox to image
c = int(cls) # integer class
label = None if hide_labels else (names[c] if hide_conf else f"{names[c]} {conf:.2f}")
annotator.box_label(xyxy, label, color=colors(c, True))
if save_crop:
save_one_box(xyxy, imc, file=save_dir / "crops" / names[c] / f"{p.stem}.jpg", BGR=True)
# Stream results
im0 = annotator.result()
if view_img:
if platform.system() == "Linux" and p not in windows:
windows.append(p)
cv2.namedWindow(str(p), cv2.WINDOW_NORMAL | cv2.WINDOW_KEEPRATIO) # allow window resize (Linux)
cv2.resizeWindow(str(p), im0.shape[1], im0.shape[0])
cv2.imshow(str(p), im0)
cv2.waitKey(1) # 1 millisecond
# Save results (image with detections)
if save_img:
if dataset.mode == "image":
cv2.imwrite(save_path, im0)
else: # 'video' or 'stream'
if vid_path[i] != save_path: # new video
vid_path[i] = save_path
if isinstance(vid_writer[i], cv2.VideoWriter):
vid_writer[i].release() # release previous video writer
if vid_cap: # video
fps = vid_cap.get(cv2.CAP_PROP_FPS)
w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
else: # stream
fps, w, h = 30, im0.shape[1], im0.shape[0]
save_path = str(Path(save_path).with_suffix(".mp4")) # force *.mp4 suffix on results videos
vid_writer[i] = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
vid_writer[i].write(im0)
# Print time (inference-only)
LOGGER.info(f"{s}{'' if len(det) else '(no detections), '}{dt[1].dt * 1e3:.1f}ms")
# Print results
t = tuple(x.t / seen * 1e3 for x in dt) # speeds per image
LOGGER.info(f"Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {(1, 3, *imgsz)}" % t)
if save_txt or save_img:
s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ""
LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}")
if update:
strip_optimizer(weights[0]) # update model (to fix SourceChangeWarning)
def parse_opt():
parser = argparse.ArgumentParser()
# parser.add_argument("--weights", nargs="+", type=str, default=ROOT / "yolov5s.pt", help="model path or triton URL")
parser.add_argument("--weights", nargs="+", type=str, default=ROOT / "yolov5s.pt", help="model path or triton URL")
# parser.add_argument("--source", type=str, default=ROOT / "data/images", help="file/dir/URL/glob/screen/0(webcam)")
parser.add_argument("--source", type=str, default="6", help="file/dir/URL/glob/screen/0(webcam)")
parser.add_argument("--data", type=str, default=ROOT / "data/coco128.yaml", help="(optional) dataset.yaml path")
parser.add_argument("--imgsz", "--img", "--img-size", nargs="+", type=int, default=[640], help="inference size h,w")
parser.add_argument("--conf-thres", type=float, default=0.75, help="confidence threshold")
parser.add_argument("--iou-thres", type=float, default=0.45, help="NMS IoU threshold")
parser.add_argument("--max-det", type=int, default=1000, help="maximum detections per image")
parser.add_argument("--device", default="", help="cuda device, i.e. 0 or 0,1,2,3 or cpu")
parser.add_argument("--view-img", action="store_true", help="show results")
parser.add_argument("--save-txt", action="store_true", help="save results to *.txt")
parser.add_argument(
"--save-format",
type=int,
default=0,
help="whether to save boxes coordinates in YOLO format or Pascal-VOC format when save-txt is True, 0 for YOLO and 1 for Pascal-VOC",
)
parser.add_argument("--save-csv", action="store_true", help="save results in CSV format")
parser.add_argument("--save-conf", action="store_true", help="save confidences in --save-txt labels")
parser.add_argument("--save-crop", action="store_true", help="save cropped prediction boxes")
parser.add_argument("--nosave", action="store_true", help="do not save images/videos")
parser.add_argument("--classes", nargs="+", type=int, help="filter by class: --classes 0, or --classes 0 2 3")
parser.add_argument("--agnostic-nms", action="store_true", help="class-agnostic NMS")
parser.add_argument("--augment", action="store_true", help="augmented inference")
parser.add_argument("--visualize", action="store_true", help="visualize features")
parser.add_argument("--update", action="store_true", help="update all models")
# parser.add_argument("--project", default=ROOT / "runs/detect", help="save results to project/name")
parser.add_argument("--project", default="0", help="save results to project/name")
parser.add_argument("--name", default="exp", help="save results to project/name")
parser.add_argument("--exist-ok", action="store_true", help="existing project/name ok, do not increment")
parser.add_argument("--line-thickness", default=3, type=int, help="bounding box thickness (pixels)")
parser.add_argument("--hide-labels", default=False, action="store_true", help="hide labels")
parser.add_argument("--hide-conf", default=False, action="store_true", help="hide confidences")
parser.add_argument("--half", action="store_true", help="use FP16 half-precision inference")
parser.add_argument("--dnn", action="store_true", help="use OpenCV DNN for ONNX inference")
parser.add_argument("--vid-stride", type=int, default=1, help="video frame-rate stride")
opt = parser.parse_args()
opt.imgsz *= 2 if len(opt.imgsz) == 1 else 1 # expand
print_args(vars(opt))
return opt
#
def main(opt):
check_requirements(ROOT / "requirements.txt", exclude=("tensorboard", "thop"))
run(**vars(opt))
# rospy.init_node('yolov5_node')
# rospy.loginfo("Hello World!!!!")
# position_pub = rospy.Publisher(
# '/object_positions',
# Point,
# queue_size=3
# )
if __name__ == "__main__":
rospy.init_node('yolov5_detector')
coord_pub = rospy.Publisher('/detected_coordinates', Point, queue_size=10) #发布位置信息
# marker_pub = rospy.Publisher('/detection_marker', Marker, queue_size=10) #发布rviz位置
opt = parse_opt()
main(opt)
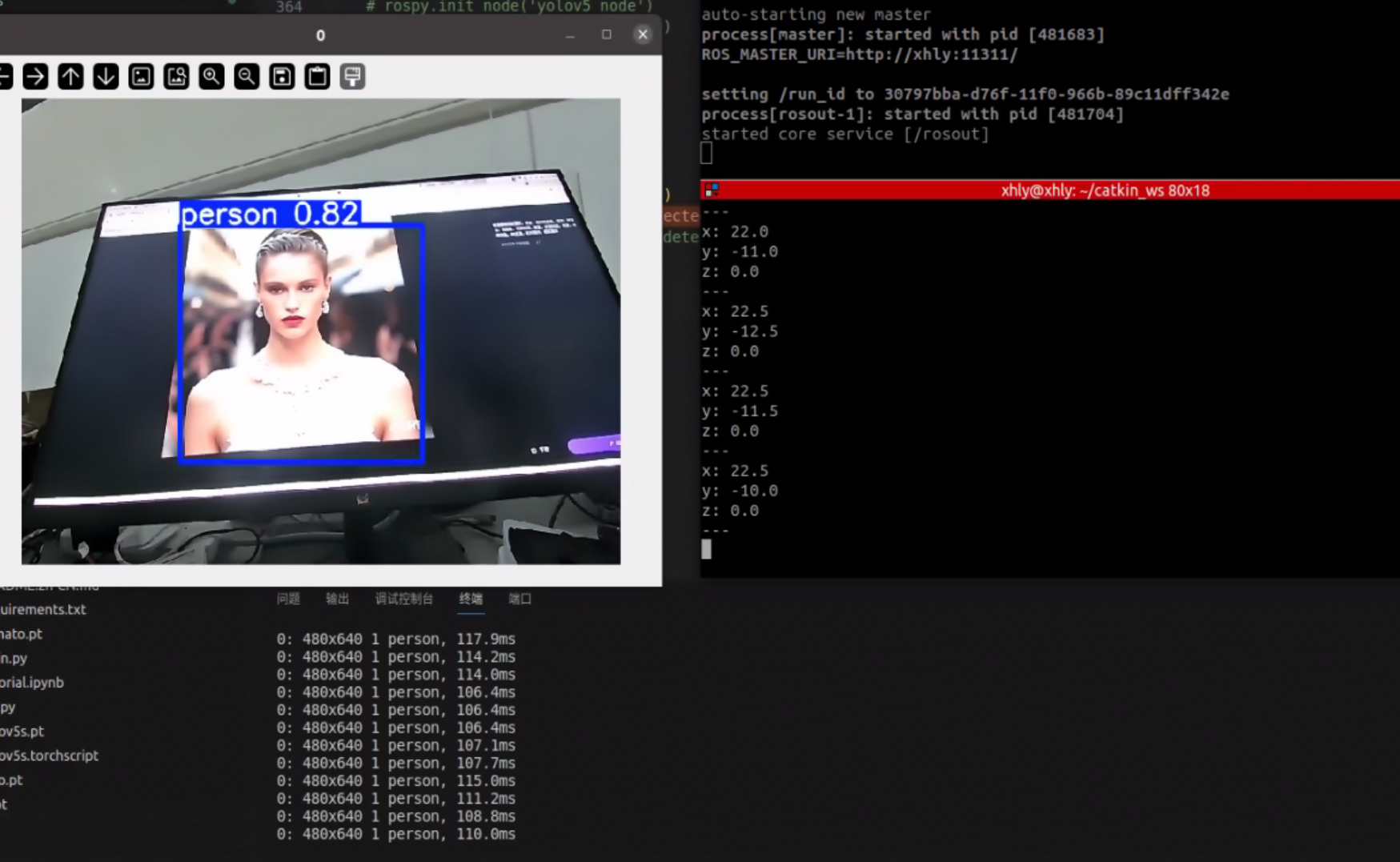
直接识别目标并获取到像素坐标位置信息:

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)