《自动驾驶与机器人中的SLAM技术:从理论到实践》笔记——ch4(1)
IMU预积分的初衷是借助视觉SLAM中图优化的思想,将帧与帧之间IMU相对测量信息转换为约束节点的边参与到优化框架中(看不明白这句话),但是IMU预积分的本质是由之前学习的知识我们知道IMU的值是测量值和噪声构成,在上述过程中必不可少得有噪声的干扰,在PVQ更新过程中,通过对IMU测量噪声协方差的递推,获得每周期PVQ增量测量值的噪声分布,再通过求协方差的逆的平方根,得到信息矩阵,对残差中PVQ的
4.预积分学
4.1IMU状态的预积分学
4.1.1概述
IMU预积分的初衷是借助视觉SLAM中图优化的思想,将帧与帧之间IMU相对测量信息转换为约束节点的边参与到优化框架中(看不明白这句话),但是IMU预积分的本质是相邻两帧之间的IMU积分测量值计算及其动态更新,获得每周期PVQ(位置、速度、姿态)增量的测量值,对照其他非IMU方式获得的PVQ增量的估计值,进而获得PVQ增量的残差,根据残差构建代价函数对每个节点的PVQ进行迭代更新和优化。
由之前学习的知识我们知道IMU的值是测量值和噪声构成,在上述过程中必不可少得有噪声的干扰,在PVQ更新过程中,通过对IMU测量噪声协方差的递推,获得每周期PVQ增量测量值的噪声分布,再通过求协方差的逆的平方根,得到信息矩阵,对残差中PVQ的比例进行调节,起到平衡权重的作用。
IMU预积分理论总共包含四个关键内容,分别是IMU预积分的优化方法、IMU预积分测量值的速算、IMU预积分优化的残差比例调节、重力加速度和绝对姿态求解。
本方法的主线是求解相邻两帧之间PVQ增量的测量值,试图通过在既有IMU预积分测量值上添加一个近似修正量的方式来避免重新积分。
4.1.2IMU预积分的优化方法
优化的核心是构造代价函数,代价函数的核心是构造残差,IMU预积分残差的定义是相邻两帧之间PVQ增量的估计值和测量值之差。

估计值通常是通过非IMU的方法获得的,测量值来源于IMU预积分。
4.1.3IMU预积分测量值的速算
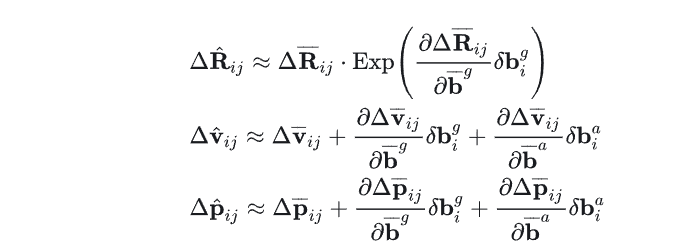
由于我们在之前学过IMU的值由测量值和噪声(零偏)构成,由于角速度和加速度的测量偏差(bias)在优化过程中会发生变化,而PVQ增量测量值包含了偏差,自然也会发生变化。为了避免重新进行积分,IMU预积分的解决方案是:设定“新偏差=旧偏差+更新量”。获得bias的更新量,然后把PVQ增量测量值当做bias的函数,求该函数对bias的导数,则bias更新量与函数导数(斜率)的乘积就是bias发生变化后PVQ测量值的修正量(近似值)。这样一来每当偏差发生变化就能够通过线性运算直接获得新的测量值,而不需要重新积分。

4.1.4IMU预积分优化的残差比例调节
IMU预积分理论的另一个关键贡献在于实现了测量噪声(即协方差)的递推计算,并将协方差转换成信息矩阵,应用于优化过程,调节残差的比例,起到平衡权重的作用。
在IMU预积分中协方差的作用和卡尔曼滤波器中协方差P的作用完全相同,也是需要迭代更新,也是用于调节残差的比例。在IMU预积分中,首先将测量噪声从PVQ增量测量值中分离出来,证明其服从高斯分布,然后推导出协方差的递推公式。
所谓信息矩阵其实就是用于调节残差比例的权重,首先要取协方差矩阵的逆矩阵,相当于取了协方差的倒数,方差越大权重越小,反之权重越大,然后再将逆矩阵转成信息矩阵。
4.1.5推导公式
1.将噪声项从PVQ增量真值中分离出来
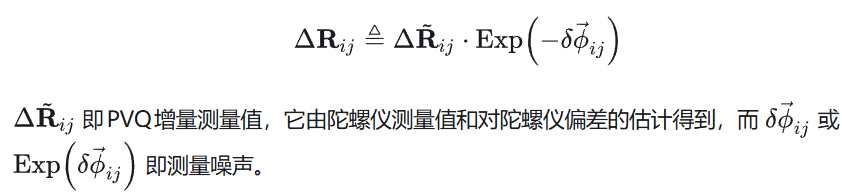


2.代入PVQ增量真值表达式
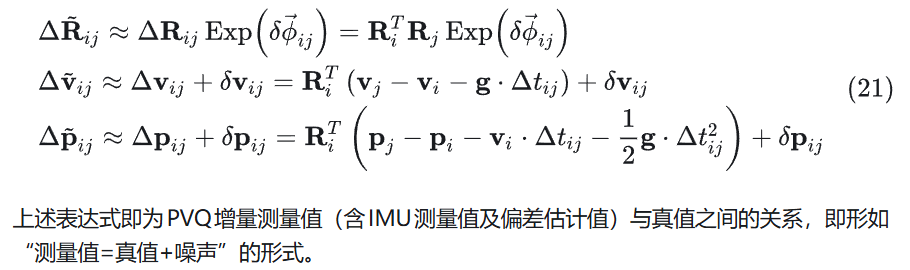
3.噪声的递推形式及信息矩阵
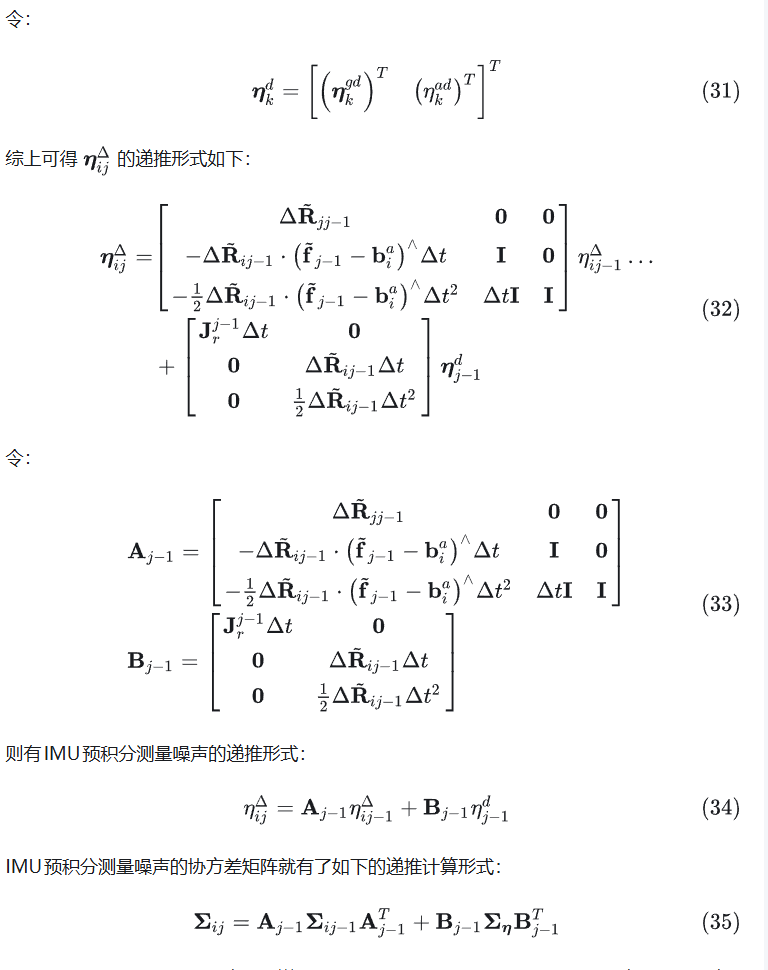
在实际应用中首先要求协方差矩阵的逆矩阵,相当于取了协方差的倒数,方差越大权重越小,反之权重越大,然后再将逆矩阵转成信息矩阵,与残差相乘,起到调节残差比例的作用。
4.添加了偏差之后的公式
有了残差和偏差之后,接下来就变成了一个非线性最小二乘问题,
过迭代求解增量的方式,不断更新状态变量,使损失函数下降:

4.1.6小结
ps:这一个看书根本看不懂,建议参考这位博主的帖子:IMU预积分的理解和推导 - 知乎
困死我了,终于理解了,仅仅是能理解啊

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 17
17 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)