πRL——首个在线RL微调流式VLA π0/π0.5的框架:通过Flow-Noise和Flow-SDE实现精确对数似然估计,全面提升性能
本文探讨了工业机械臂智能化改造的最新方法,重点介绍了首个在线强化学习(RL)微调流式视觉语言代理(VLA)的框架πRL。针对传统自回归VLA在连续动作控制上的局限性,πRL创新性地提出了Flow-Noise和Flow-SDE两种解决方案,克服了流匹配中对数似然估计的难题。该框架通过将强化学习与基于流的VLA架构(如π0和π0.5)相结合,实现了高精度且泛化的机械臂控制能力,为工厂智能化改造提供了新
前言
由于我司过去一年一直侧重这五大场景的落地:机械臂的智能插拔与装配、人形灵巧操作、人形展厅讲解、人形搬运(含轮式和双足)、自动加油机器人
而对于其中的「机械臂智能插拔与装配」而言,如本博客之前的两篇文章所说
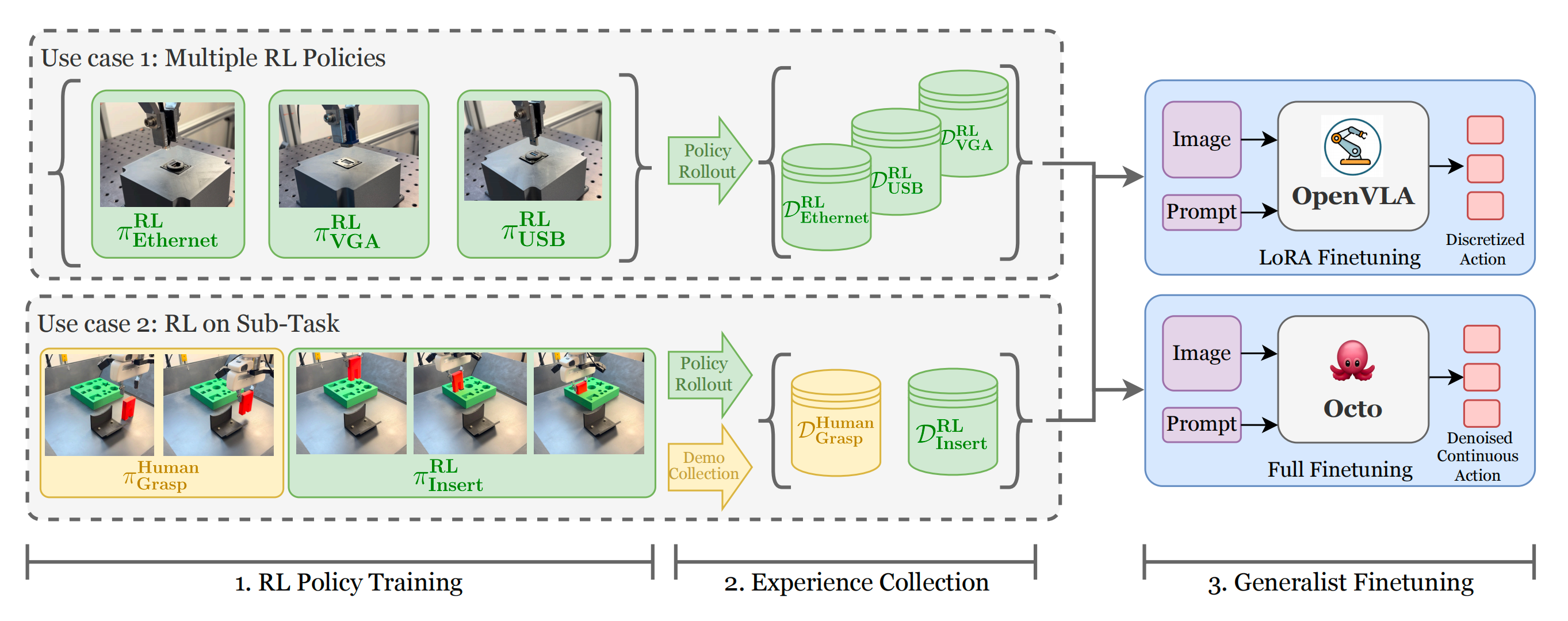
- 《知识蒸馏RLDG:先基于精密任务训练RL策略(HIL-SERL),得到的RL数据去微调OpenVLA,最终效果超越人类演示数据》
该文首发于25年8月底,文中曾说:
如果想兼具精准度和泛化性,RL微调vla 暂时最合适
我估计,RL结合VLA的方法,很快会成为工厂里 智能机械臂的主流落地方法- 《ConRFT——Consistency Policy下RL微调VLA的方法:离线通过演示数据微调(结合Q损失和BC损失),后在线RL微调,且引入人工干预》
该文首发于25年9月上旬,我在该文中再次表达了类似的观点
对于工厂里机械臂的智能化改造,很显然,如果用单纯RL的话,其准度不错,但泛化性不行,如果想兼具精准度和泛化性,RL微调vla 最合适
故我相信,RL结合VLA的方法,很快会成为工厂里 智能机械臂的主流落地方法
上面这两篇文章皆收录于此系列《精密插拔与装配:从RL、VLA(含力/触)到RL微调VLA》中,而通过本博客内的这个系列可知
- 在线RL微调自回归VLA(比如openvla)已经不新鲜了,甚至在线RL微调扩散策略 也已不新鲜『比如Learning multimodal behaviors from scratch with diffusion policy gradient,及Diffusion policy policy optimization, 2024,简称DPPO』
- 但微调流式VLA,则相对少见
好在
- 25年11.5日,在我司实习的夏同学「其来自北京一985,PS,我司长沙具身总部一直在扩招985/211的硕士实习生,如可来长实习,欢迎私我」,在公司群内分享了一则视频
————
号称:【花式叠衣2.0】 VLA+RL再升级!长程、丝滑、泛化自主叠衣,想怎么叠就怎么叠 - 我当时回复他道:
有出来个πRL——该视频 可能就类似这个模式
在线RL优化π0/π0 5,可能效果比x-vla 或π0/π0.5效果更好『(注,只是可能,尚非定论,且目前πRL尚只在 “具身RL框架RLinf ”上跑,尚未在真实机器人上验证,估计25年12月份之内 会有新的进展 』
本文便来解读下这个πRL:首个在线RL微调流式VLA的框架
第一部分 πRL:基于流式VLA的在线强化学习微调
1.1 引言、相关工作、背景知识
1.1.1 引言
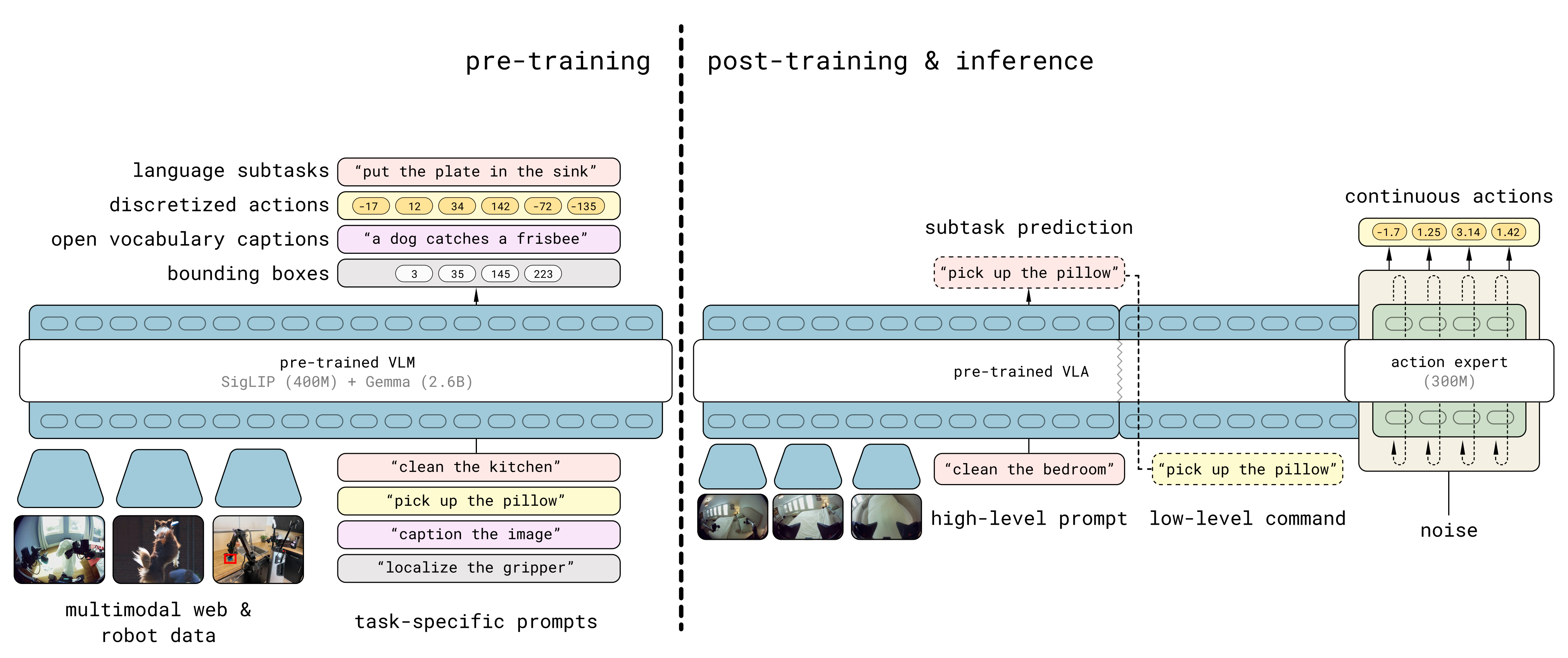
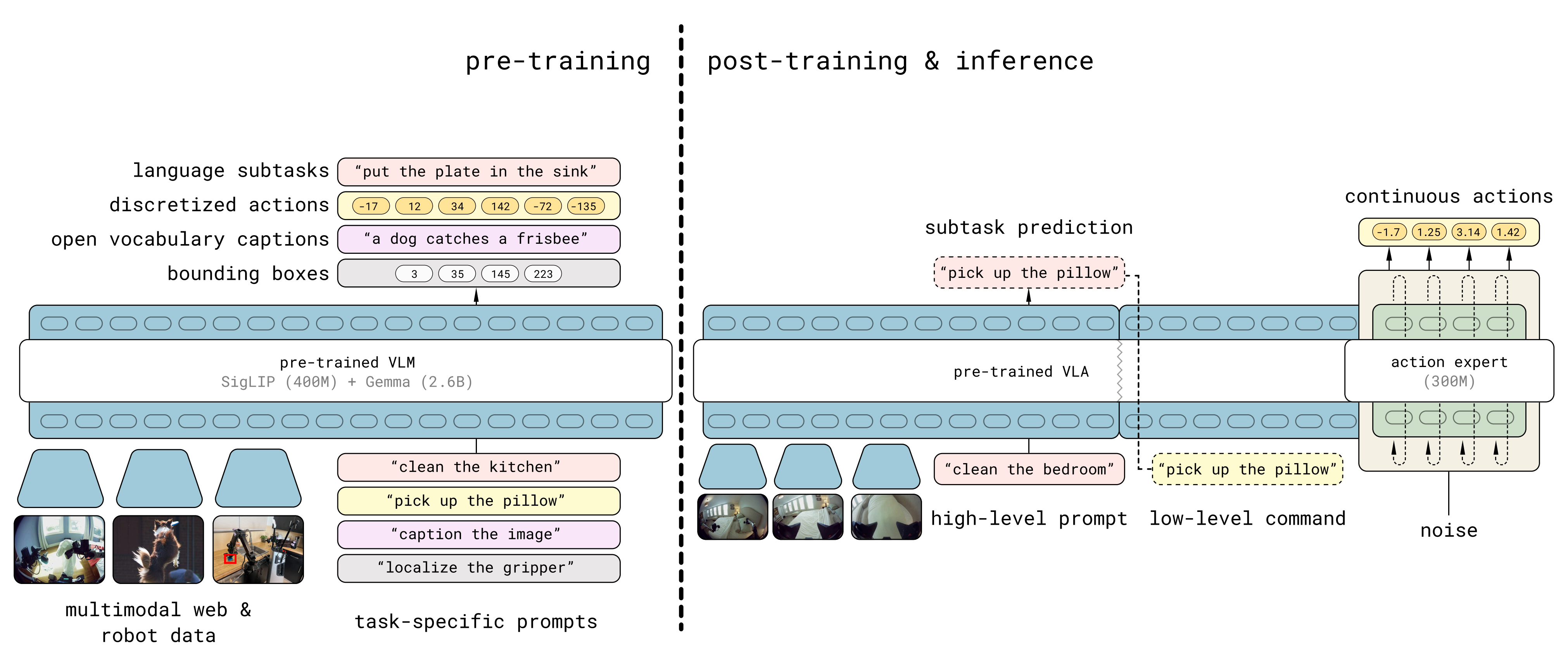
如πRL论文所述,VLAs 的训练方法遵循如图1所示的标准预训练与有监督微调(SFT)范式
- 在预训练的VLM基础上,VLA 会首先在大规模、异构的人类演示数据集上进行微调
- 然后在目标任务上进行有监督微调(SFT),以使其能力与特定的机器人形态与环境对齐
然而,依赖SFT会带来关键挑战:
构建大规模高质量的专家轨迹既费力又昂贵(Din 等,2025)
而且通过SFT获得的模型往往会过拟合于专家演示数据(Fei 等,2025)
近期的研究工作(Zang 等,2025;Li 等,2025a;Tan 等,2025;Liu 等,2025b)已探索通过强化学习(RL)扩展 VLA 的训练过程,建立了如图1所示的预训练、SFT 及 RL 训练范式,使 VLA 能够通过主动环境交互和制定更具泛化能力的策略,将其性能提升至超越最初专家示范的水平
- 然而,这些强化学习的进展主要局限于自回归视觉-语言代理(VLA)领域,典型代表包括 Open-VLA、OpenVLA-OFT
它们采用离散动作解码器,以自回归或并行方式生成输出 - 这与基于扩散或流的 VLA 形成鲜明对比,如π 系列模型 π0和 π0.5
它们通过在流匹配(Lipman 等2022)中的迭代细化过程生成动作
这种方式不仅能以高频率产生动作块,还能完成高灵巧度的任务
因此,现有的 VLA-RL 算法无法兼容基于流的 VLA,其根本挑战在于如何针对所执行的动作刻画对数似然(Hutchinson,1989;Chen 等,2018)
对此,来自♠Tsinghua University、♣Peking University、♢Institute of Automation, Chinese Academy of Sciences(即中科院自动化所)、♯Carnegie Mellon University、♢Infinigence AI、♡Zhongguancun Academ(即中关村学院)的研究者推出了πRL,这是首个用于微调基于流的VLA(即π0和π0.5)的开源并行在线强化学习框架

- 其对应的paper地址为:π𝚁𝙻: Online RL Fine-tuning for Flow-based Vision-Language-Action Models
其对应的作者包括
Kang Chen♣,♡,∗、Zhihao Liu♢,♡,∗、Tonghe Zhang♯,∗、Zhen Guo♢、Si Xu♢、Hao Lin♢
Hongzhi Zang♠、Quanlu Zhang♢、Zhaofei Yu♣、Guoliang Fan♢、Tiejun Huang♣、Yu Wang♠、Chao Yu♠,♡,† - 其对应的GitHub地址为:github.com/RLinf/RLinf
其对应的hf 地址为:huggingface.co/RLinf
且作者为了解决流匹配中难以处理的对数似然估计问题,他们提出了两种解决方案:
- Flow-Noise
将可学习的噪声网络集成到去噪流程中,并将该阶段建模为离散时间马尔可夫决策过程(MDP),以实现精确的对数似然估计 - Flow-SDE 则将普通微分方程(ODE)去噪流程转化为随机微分方程(SDE),在保证等效边缘分布用于探索的同时,构建了将去噪流程与策略—环境交互耦合的两层 MDP,并配合混合 ODE-SDE 采样技术来加速训练
在构建的 MDP 和精确对数似然计算基础上,πRL 通过近端策略优化即PPO算法进行进一步优化
1.1.2 相关工作
首先,对于VLA
VLA 模型最近通过集成多模态输入,在机器人领域取得了显著进展,实现了统一的感知、推理与控制。这一进展催生了一系列架构,包括Octo(Team 等,2024)、RT(Brohan 等,2022)、OpenVLA、OpenVLA-OFT、π0, π0.5 和GR00T(Bjorck 等,2025)
- OpenVLA 作为自回归VLA 架构的代表,将动作空间离散化为符号化表示
这使得基于语言条件的控制成为可能,通过将动作作为VLM 词汇表的一部分进行处理,但该方法在本质上限制了实现精细化运动所需的分辨率 - 为了实现更加灵巧且连续的物理行为,π0 和π0.5 作为基于流的VLA 架构的代表,引入了基于流匹配的动作分块架构
这使VLA 能够建模复杂的连续动作分布,从而实现更为灵巧的物理行为
而本文介绍的πRL则通过在线RL算法对π系列模型进行了进一步微调,通过与环境的在线交互,提升了其性能和泛化能力
其次,对于面向VLA的在线RL微调
近期的研究越来越多地集中于利用在线RL提升VLA的性能和泛化能力。例如
- SimpleVLA-RL基于OpenVLA-OFT和GRPO,展示了在数据稀缺情况下,强化学习能够提升VLA模型的长程规划能力
- RL4VLA通过阶段性稀疏奖励,实证评估了PPO、GRPO和直接偏好优化(DPO)(Rafailov等,2023),发现PPO表现最佳
- VLA-RL提出了专用的机器人流程奖励模型,并优化了数据处理流程
- iRe-VLA提出了在强化学习探索与SFT更新之间迭代的框架
详见此文《iRe-VLA——RL微调VLA:先SFT、后在线RL,最后结合“离线演示和在线成功数据”对VLA做SFT(含GRAPE的详解)》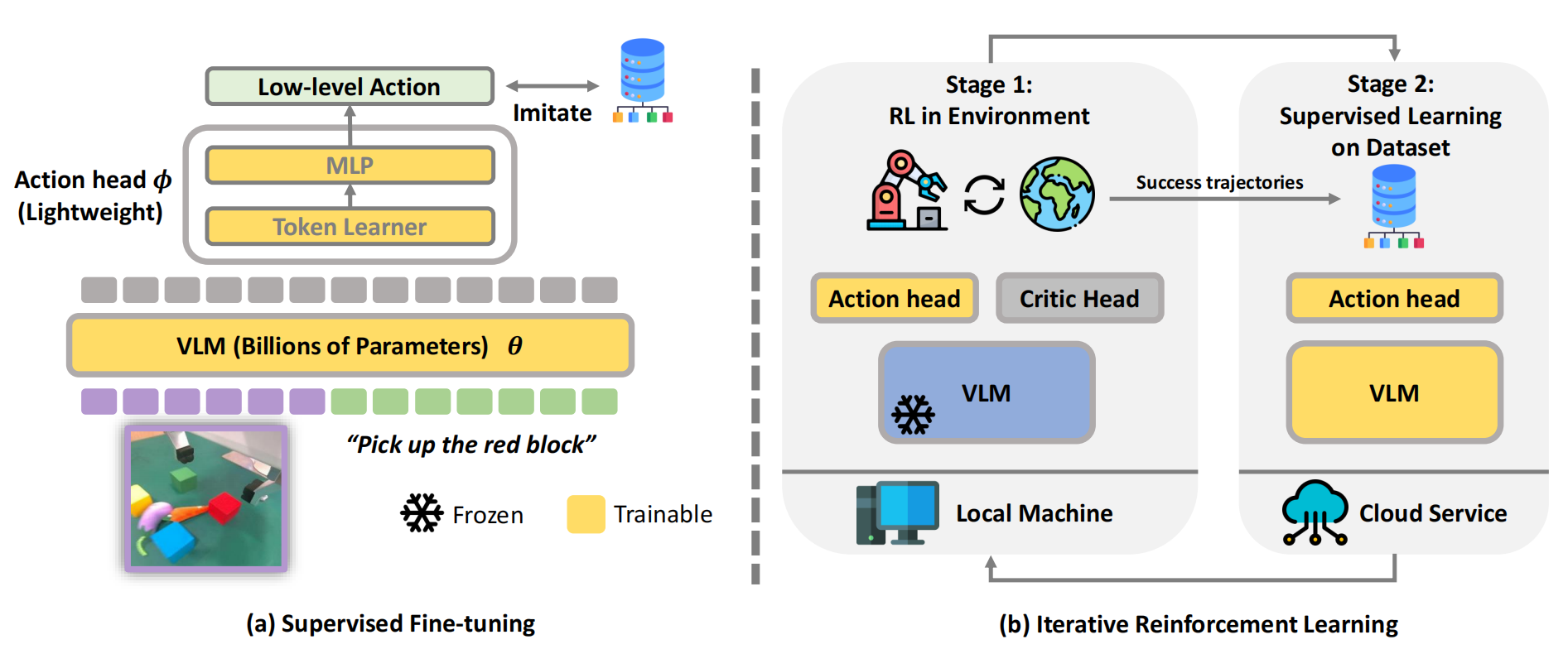
- RIPT-VLA将REINFORCE leave-one-out(RLOO)(Kool等,2018)算法应用于QueST(Mete等,2024)和OpenVLA-OFT架构
- RLinf-VLA为大规模强化学习训练VLA模型提供了统一且高效的框架,支持多样化的VLA——OpenVLA 和 OpenVLA-OFT 等架构,以及 PPO、GRPO 等多种强化学习(RL)算法,还有包括LIBERO 和 ManiSkill 在内的多种模拟器
总之,以上这些工作展示了强化学习微调 VLA 模型的有效性
尽管这些方法展示了将在线RL应用于VLA的潜力,但由于精确对数似然估计的挑战,它们在基于流的VLA中的应用仍受限
最后,对于用于流模型的强化学习微调
将RL与流模型结合是一种有前景的方法,可以突破模仿学习的局限性。为此
- Flow-GRPO(Liu 等,2025a)将确定性常微分方程(ODE)转化为等价的随机微分方程(SDE),以实现随机性探索
在此基础上,后续研究如 Mix-GRPO(Li 等,2025b)和TempFlow-GRPO(He 等,2025)通过混合 ODE-SDE rollout 进一步加速训练 - ReinFlow(Zhang 等,2025)在流路径中注入可学习的噪声,并将其转化为具有可计算似然的离散时间马尔可夫过程,从而实现稳定的策略梯度更新
——
流策略优化(FPO,McAllister 等,2025)将策略优化重构为最大化条件流匹配损失的优势加权比 - 此外,策略无关强化学习(PA-RL,Mark 等,2024)能够通过监督学习将评论家优化后的动作蒸馏到策略中,实现对各类扩散和 Transformer 架构的高效微调
————
通过强化学习引导扩散(DSRL,Wagenmaker 等,2025)则在其潜在噪声空间中执行强化学习,从而优化流策略,而无需直接修改策略参数本身
尽管以往的研究大多集中于非机器人任务或小规模、单一任务的机器人领域,但πRL则针对更具挑战性的难题:即对大规模基于流的VLA在复杂多任务机器人场景中的微调
1.1.3 问题表述与基于流的VLA
首先,对于问题定义
在πRL中
- 作者将该任务形式化为一个MDP,由元组
定义
状态被定义为机器人观测
,
表示初始状态分布
- 给定状态,流式策略预测动作
从而产生状态转移
并获得奖励 - 目标是学习一个策略
,使其在
步时间范围内最大化期望的
折扣回报:
通过策略梯度代理,回报期望的梯度可以根据采样得到的轨迹进行近似(定义为公式2)
其中的优势函数,衡量动作价值Q (st, at) 相对于状态价值V (st)的相对优劣,为策略更新提供了低方差的信号
其次,对于基于流的VLA而言,π0 被设计用于将由RGB 图像、语言token和机器人本体感觉组成的观测 映射为未来H 步动作序列
,其形式化为
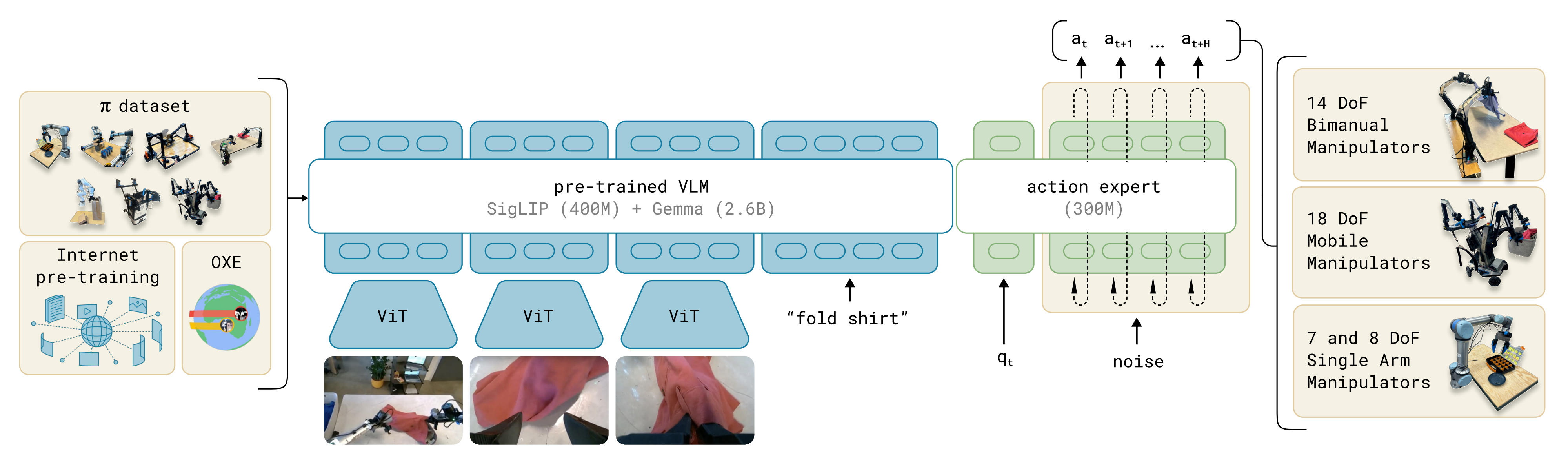
- 在该模型中,VLM 从视觉和语言输入中提取特征,而流匹配专家负责生成动作
- 具体而言,该模型学习一个条件向量场
,用于将标准高斯噪声分布变换为目标动作
这是通过最小化条件流匹配CFM损失来实现的,该损失将预测的向量场对齐『which aligns the predicted vector field vθ with the ground-truth vector field u』
在这里,条件概率路径从一个动作
、随机噪声
和流匹配中的连续时间
生成一个带噪动作
对于这个特定路径,相应的真实向量场被定义为:
————
若不太明白的话,可以看下我博客内对π0的解读,另 上面这段对应的论文原文如下图所示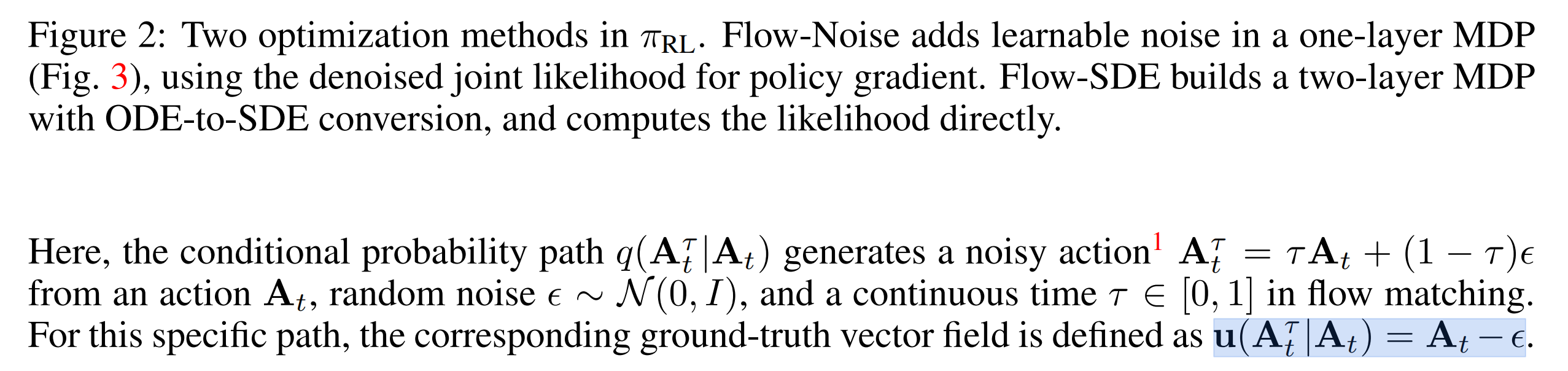
在推理过程中,动作序列首先通过对噪声向量进行采样生成,之后再通过基于前向欧拉方法,将学习到的向量场
在固定步数内迭代地集成,不断细化:
1.2 πRL提出的两种方法:Flow-Noise 和Flow-SDE
现有的 VLA-RL 方法分别利用 OpenVLA 这类基础模型用于离散动作,使用 OpenVLA-OFT 进行连续动作
为计算动作对数似然
- 离散模型(Liu 等,2025b)对输出 logits 应用 softmax
- 而连续模型(Li 等,2025a)则将动作视为高斯分布,并使用预测头来估计方差
对于基于流的 VLA,若直接计算精确的似然(Hutchinson,1989),在去噪步骤较少时准确性较差。此外,其常微分方程采样过程是确定性的,缺乏探索性,使其在强化学习中的实现较为复杂
对此,作者提出了 Flow-Noise 和Flow-SDE 两种技术方法,使基于流的 VLA 更适用于强化学习,如图 2 所示
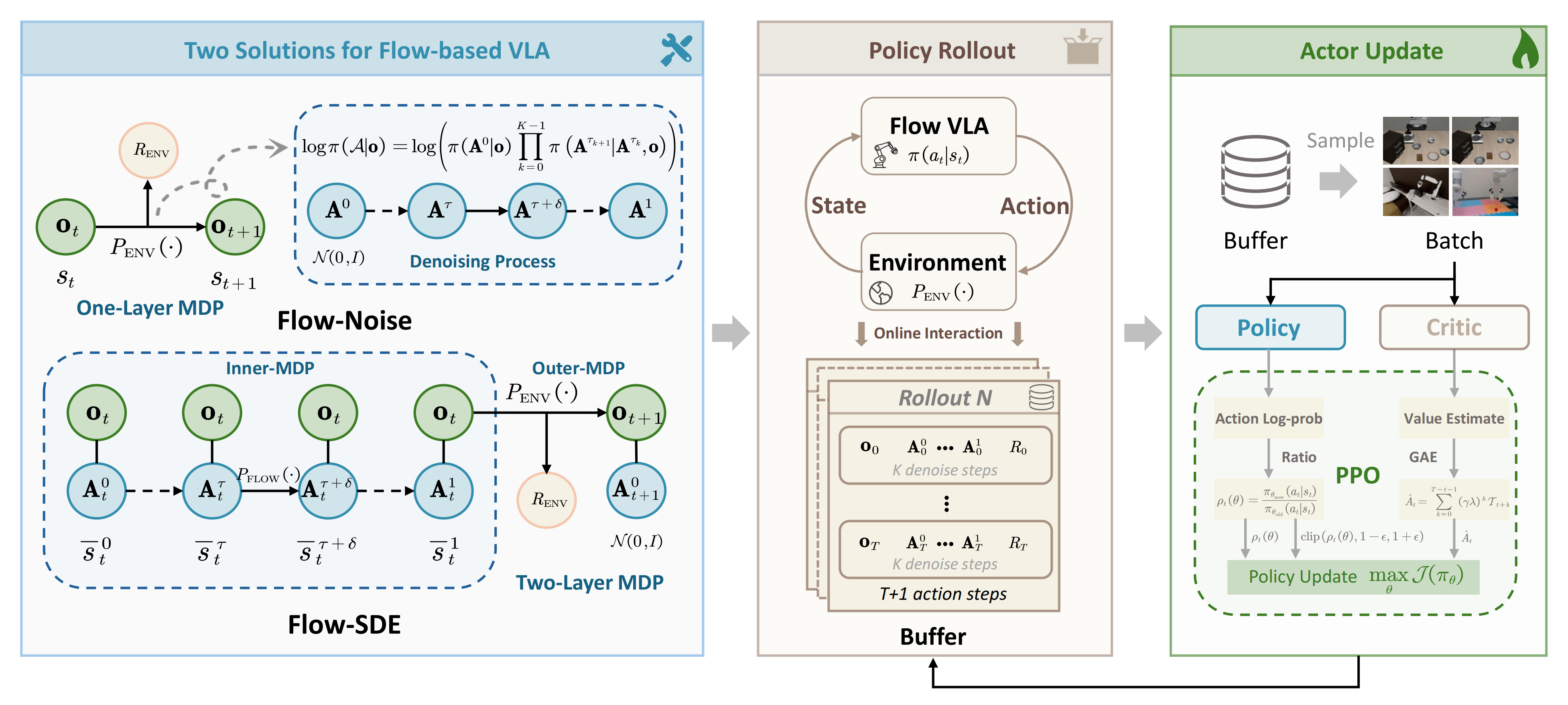
1.2.1 Flow-Noise(流噪声):包含随机性注入和对数似然估计
受 Reinflow『即Reinflow: Fine-tuning flow matching policy with online reinforcement learning』的启发
如Reinflow论文所说,精化随机策略对于连续控制问题至关重要 [49]
- 然而,对于条件流来说,其样本路径由神经常微分方程(ODE)控制,连对数概率这一衡量随机性的关键因素都可能难以获得,并且在反向传播过程中不稳定。这一问题在只用极少去噪步数推断流策略时更加严重,因为此时离散化误差会变大,但推断成本却较低
- 其次,与离线强化学习方法相比,在线强化学习微调要求策略在探索与利用之间进行权衡,尤其是在稀疏奖励环境下 [20]
然而,对于具有确定性路径的条件流,如何设计合理的探索机制仍然尚未解决对此,他们提出了ReinFlow,这是第一个能够稳定地在线微调一类流匹配策略的强化学习算法,尤其能够在很少甚至仅一次去噪步骤中实现
- Reinflow的作者训练了一个噪声注入网络,将流转换为具有高斯转移概率的离散时间马尔可夫过程,从而实现精确且易于计算的似然度
- 且设计允许噪声网络自动平衡探索与利用
即该方法实现轻便,内建探索机制,并能广泛适用于各类流策略变体,包括基于Rectified Flow [34]和Shortcut Models [18]参数化的模型
作者在流匹配去噪过程中引入了可学习的噪声网络,并在上文1.3.1节中详述的标准单层 MDP 框架下解决该问题
通过将去噪阶段建模为一个离散MDP,作者可以直接计算去噪序列的对数似然,从而能够通过强化学习实现等价的策略优化
1.2.1.1 随机性注入
在Flow-Noise 中,作者用神经网络对噪声调度进行参数化,使注入噪声的幅度能够在训练过程中动态学习,从而具有更大的灵活性,如图3 所示『注意,是一个去噪序列』
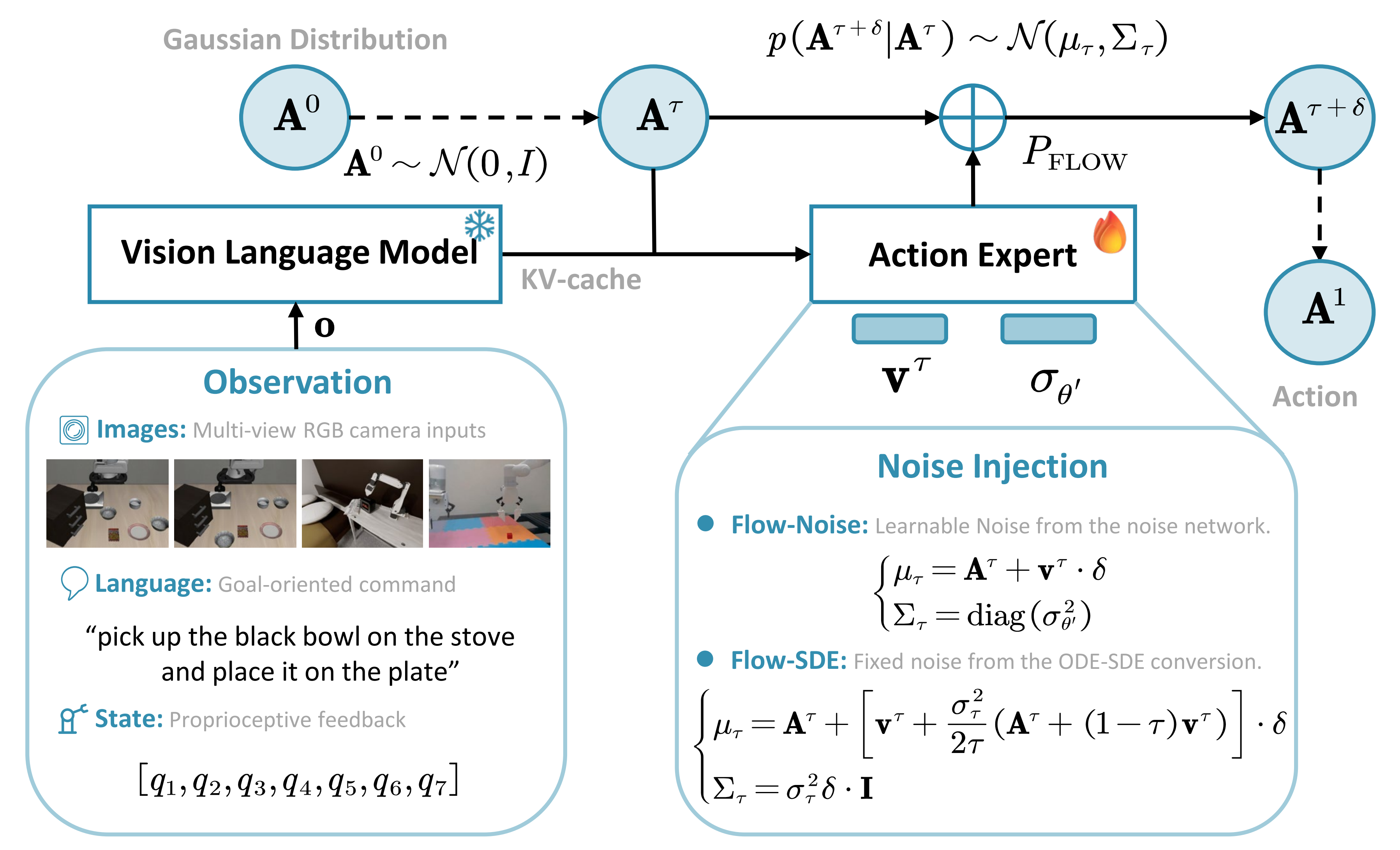
- 上图是展示在流匹配过程中噪声注入的示意图,以π0.5为例『至于π0.5的介绍,详见此文《π0.5——推理加强的统一模型:先高层预训练离散化token自回归预测子任务、后低层执行子任务(实时去噪生成连续动作)》』,它融合了图像、语言和状态信息,实现了统一的VLM输入30
- 作者关注于单个环境时间步t 内的生成过程
为了符号简洁,省略时间下标t,例如,将写作
,并将预测速度
记作
在去噪过程中,步进转移被建模为各向同性高斯分布,其中均值由原始常微分方程的前向欧拉更新决定,方差则由可学习的噪声网络
控制
这里,是从噪声注入网络中学习得到的标准差,该网络以动作
和观测
为条件。噪声网络与velocity网络联合训练,但在微调后被弃用,此时用于推理的策略为确定性策略
1.2.1.2 对数似然估计
在将策略梯度方法应用于基于流的VLA时,主要挑战来自于最终执行动作的对数似然不可求解
而在Flow-Noise中,作者通过将整个去噪过程的联合对数似然的梯度替代到等式(2)的策略优化目标中
从而解决了这一问题,而这一做法在理论上受到了Reinflow的支持
- 动作生成的推理过程被离散化为
个均匀的步骤,这定义了一系列时间点
。步长被定义为
,在第
个时间点的离散时间步为
,从
开始,到
结束
- 给定观测
,整个去噪序列
的精确且易处理的对数概率如图2 所示
并表述为
在此基础上,可以在标准的马尔可夫决策过程(MDP)框架内处理基于流的方法策略优化
1.2.2 FLOW-SDE(流-随机微分方程):随机性注入、MDP建模、HYBRIDODE-SDE采样
受到 Flow-GRPO的启发,作者通过将去噪过程从 ODE 转化为 SDE 形式来增强随机探索能力。且进一步构建了两层 MDP,将去噪过程与基于 DPPO(Ren等,2024)的策略-环境交互耦合,同时利用混合 ODE-SDE 采样技术加速训练过程
1.2.2.1 随机性注入
在 Flow-SDE 中,作者将确定性常微分方程(ODE)转化为等效的随机微分方程(SDE),以保留生成动作的边缘概率密度,如图3所示
流匹配的确定性常微分方程采样轨迹,特别是Rectified Flow(Liu等人,2022),通过前向欧拉方法进行描述(定义为公式6):
基于概率流ODE与SDE之间的联系,作者可以将公式6中的确定性ODE转化为等效的SDE,其中漂移项(drift term)修正了原始速度,而扩散项(diffusion term)引入了噪声(定义为公式7)
其中
是控制噪声进度的标量函数
是边缘分布
的得分函数
表示一个Wiener 过程
如在Flow-GRPO 中所建立,分数函数score function和速度场(velocity field) 通过
密切相关
通过在公式(7) 中用速度场(velocity field) 替换分数函数,并将噪声调度
设为
,其中
控制噪声水平,则得到了用于flow-matching 采样器的最终SDE 公式
对该SDE 进行离散化可以看出,转移概率是一个各向同性高斯分布,其均值和方差表达如下:
1.2.2.2 MDP建模
虽然Flow-Noise 用整个去噪序列的联合对数似然替代了最终执行动作的似然,但作者在Flow-SDE 中将流匹配的去噪过程与环境交互结合起来
具体而言,作者将去噪过程中定义的内部MDP 嵌入到上文中所述的高层外循环MDP 以及环境MENV 中,形成如图2所示的两层MDP
其中各组成部分以环境时间 和去噪时间
来定义
- 状态
是由观测
- 动作
定义为内循环中下一个采样的去噪动作,以及外循环中执行的动作(定义为公式10)
其中,是随机采样的噪声
- 转移
定义了状态的演化方式,表述如下
————对于
,内循环 inner loop转移
发生在不同去噪动作状态之间,此时观测值
设定
相当于内层 MDP 负责处理去噪的生成过程,最终动作
与外循环outer-loop环境交互,根据环境动力学
产生新的观测值
相当于外层 MDP 对接真实环境交互
同时,动作状态从标准正态分布重新初始化
- 奖励
仅在去噪过程完成并与环境交互后才会发放如下所示
在两层MDP 框架内,估计动作对数似然的问题被转化为估计
,由于转移的高斯性质,该估计可以直接计算
1.2.2.3 HYBRIDODE-SDE 采样:降低训练难度与所需的计算时间
在所提出的两层MDP框架中,有效轨迹长度等于环境交互步骤数与流匹配去噪步骤数的乘积。虽然这种建模方式使基于流的VLA能够进行强化学习训练,但其MDP时域长度相比非迭代式VLA方法大大延长,因此显著增加了训练的难度以及优化所需的计算时间
- 为此,作者采用了混合ODE-SDE 展开策略,灵感来源于文本到图像生成方法,如Mix-GRPO(Li 等,2025b)和TempFlow-GRPO(He 等,2025)
————
具体而言,在去噪过程中,会随机选择一步作为由控制的随机SDE 转移,而其余步骤则遵循由更新规则
定义的确定性ODE 转移
- 在这种表述下,作者将状态之间的确定性ODE 转移视为环境级封装器,并修正了先前两层MDP 的状态转移函数
————
具体来说,在每个环境步t,会随机选择一个去噪时间τt 用于策略的随机注入,根据公式(10) 采样动作
时转移到下一个观测
和下一个动作状态
在此过程中,策略的状态输入和动作输出与之前的两层MDP 表述保持一致,从而确保了理论上的一致性
1.2.3 策略优化:包含算法与评价器设计
1.2.3.1 算法
给定所构建的流量策略MDP,目标是学习能够最大化期望折扣回报的最优策略参数
,即策略
。为此,作者采用广泛使用的策略梯度算法PPO 来优化该策略
- π-系列模型(Black 等,2024;Intelligence 等,2025)采用了基于块的动作生成方法。具体来说,策略对于每一个观测输出一整个未来H 步的动作序列
- 在这种方法中,作者将整个序列视为一个单独的宏观步骤,并将其对应的奖励
定义为每一步奖励
的总和,这在RLinf-VLA(Zang等,2025)中被称为块级表述
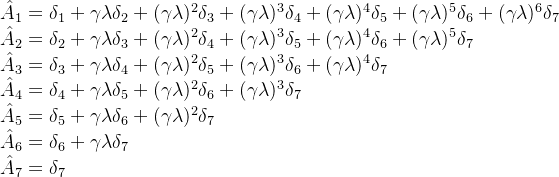
为了有效引导策略更新,PPO采用广义优势估计(GAE)(Schulman等,2015年)来计算优势的低方差估计,具体如下:
其中,TD 误差为。这里,
是从评论家网络获得的状态价值函数,
是折扣因子,
是用来平衡优势估计中偏差与方差之间权衡的参数
为方便大家更好的理解,我再帮大家展开一下
本质上来说,和本博客之前的这篇文章《从零实现带RLHF的类ChatGPT:逐行解析微软DeepSpeed Chat的源码》中对GAE的介绍 是一个意思
从而有
当然了,如果你想看带数字的实际例子,则可以参见此文《ChatGPT技术原理解析:从RL之PPO算法、RLHF到GPT4、instructGPT》的此节「3.3.2 GAE之下的优势函数计算、回报序列计算、价值序列的迭代」
再之后
- PPO将策略更新限制在一个较小的信任域内,以防止出现较大且不稳定的更新,其目标函数为:
其中clip 函数由超参数控制,将比率
限制在区间
内,以确保训练的稳定性
————
如果你对PPO的这个表达式不熟悉的话,可以参见此文《强化学习极简入门:通俗理解MDP、DP MC TD和Q学习、策略梯度、PPO》中的此节「4.4.2 PPO算法的另一个变种:近端策略优化裁剪PPO-clip」
- 在此,更新后与旧策略之间的概率比率ρt(θ)呈现如下形式:
分别对应于单层和双层MDP建模
1.2.3.2 评价器设计
继VLA-PPO相关工作(Zang等,2025;Liu等,2025b)之后,作者采用了如图4所示的共享actor-critic架构,以实现内存高效的价值预测
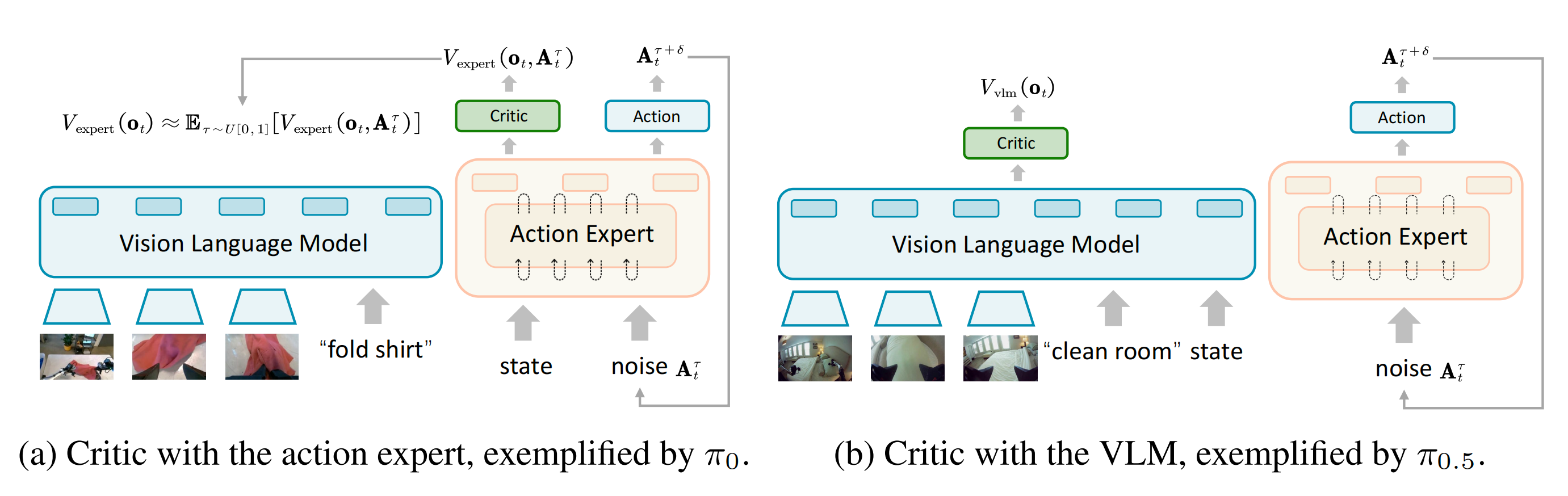
然而,这两种基于流的VLA在处理本体感受状态时方式不同
- 在π0中,状态被输入到动作专家模型中
- 而在π0.5中,状态则与VLM中的提示嵌入进行了融合
为此
- 如下图右侧所示,对于π0.5 变体
作者将评价网络直接连接到VLM 输出上,提供基于融合的图像、语言和状态输入的价值估计 - 如上图左侧所示,对于π0 变体
由于其输入结构是耦合的,其中动作专家需要同时获取噪声动作Aτt 和状态,因此实现价值预测并非易事
为此,作者通过对整个去噪轨迹的价值估计进行平均,来近似,其形式如下
1.3 实验结果
// 待更

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 35
35 0
0- 0



 已为社区贡献77条内容
已为社区贡献77条内容

所有评论(0)