开源四轮ROS差速机器人控制方案
文章摘要:在电机驱动方案选型中,对比了亚博四路驱动板(串口控制简单)和TB6612驱动板(代码迁移容易但接线复杂),最终选择亚博驱动板实现四轮差速控制。系统采用"虚拟两轮"简化策略,将左右侧轮组同步控制(vL/vR),通过速差实现转向。编码器反馈取两侧轮速平均值,形成闭环控制。该设计兼顾了接线简便性与控制逻辑清晰性。
代码开源:https://gitee.com/alina-yyl/ros_arduino_bridge.git
系统组成:
上位机: Jetson
下位机:arduino_mage_2560
电机:MG540直流减速电机
在刚开始元器件选型前确定了两种方案:
| 型号 | 亚博四路电机驱动板 | tb6612四路电机驱动板 |
| 优点 | 通过串口协议控制,接线简单 | 代码实现较简单,之前用过2路的,容易迁移 |
| 缺点 | 代码层面实现需要有一定的debug能力 | 需要将四路的驱动板线全接单片机,接线复杂 |
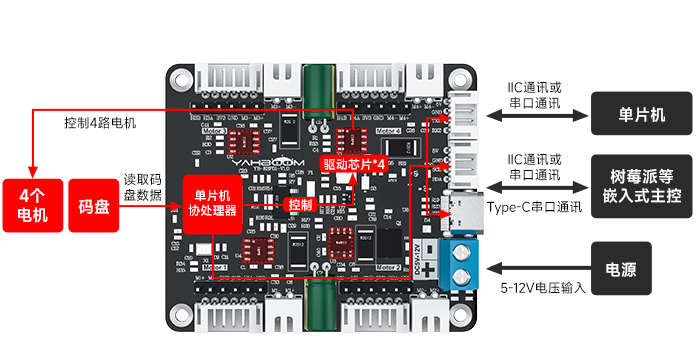
最后选择了亚博的,用来做电机控制板,整体系统框图如下所示
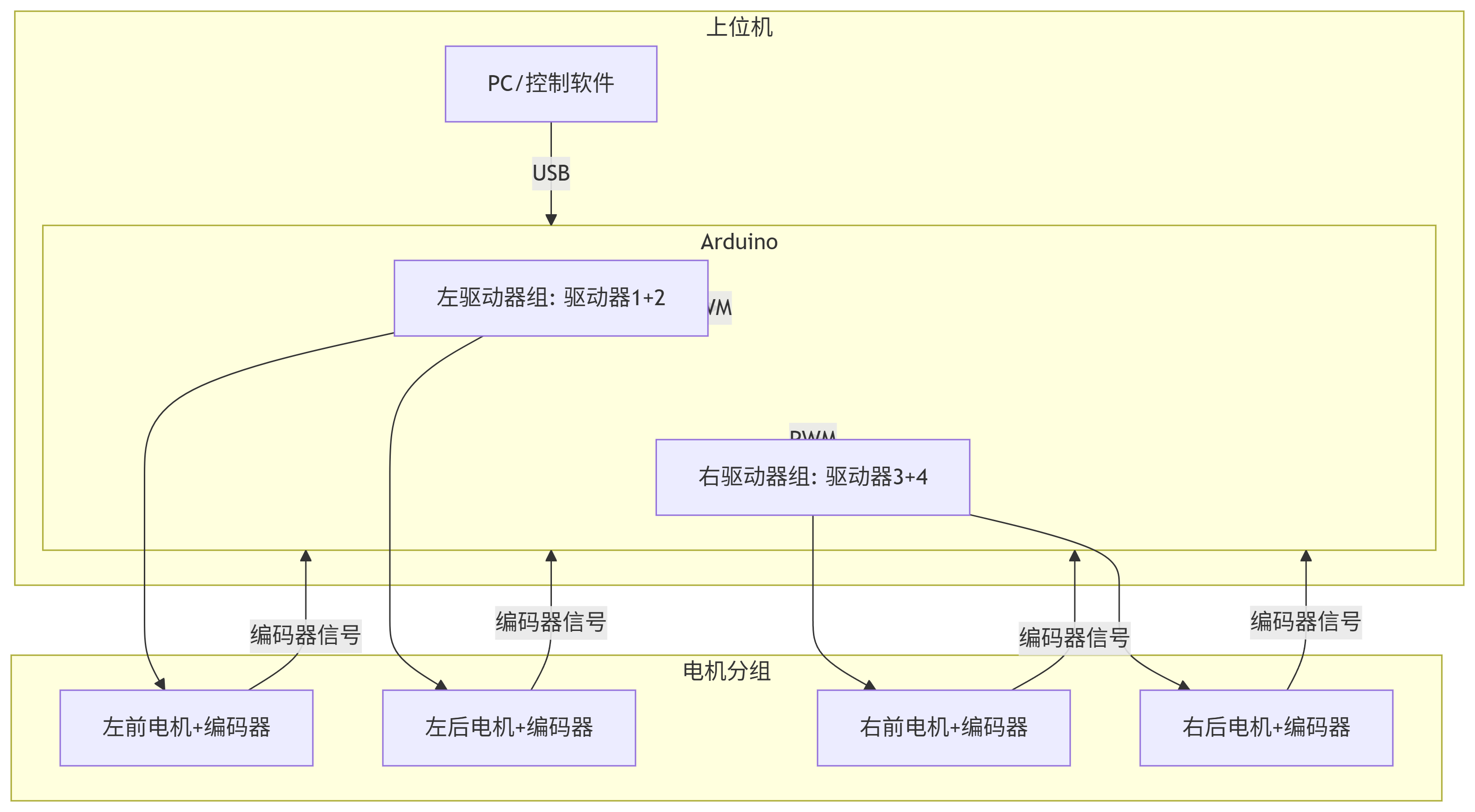
1.四轮差速简化控制原理
-
核心思想:将四轮差速车视为“虚拟两轮差速车”,将左右两侧的两个轮子视为一个整体(即左组轮和右组轮)。
-
控制方式:
-
左前轮和左后轮 速度同步(vL=v左前=v左后)。
-
右前轮和右后轮 速度同步(vR=v右前=v右后)。
-
通过左右轮速差(vR−vL)实现转向,通过同速(vL=vR)实现直行。
-
-
两轮差速模式下的行为
动作 左组轮速度 vL 右组轮速度 vR 运动效果 直行 vL=vR vR=vL 四轮同步,直线前进/后退 左转 vL<vR vR>vL 绕左侧轮组中心转向 右转 vL>vR vR<vL 绕右侧轮组中心转向
- 编码器反馈处理
-
每组轮子的两个编码器信号需取平均值或加权值,作为该侧的实际速度反馈。
v左实际=(v左前编码器+v左后编码器)/2
例如:
-
2.建立Arduino与电机驱动板通信
- 使用4p的PH2.0,根据引脚连接Arduino的串口。
- 将电机驱动板输入电源负极接入ArduinoGND(共地)
- 在setup()中新定义刚接的串口
-
void setup() { Serial.begin(BAUDRATE); Serial2.begin(MOTOR_BAUDRATE);
3.驱动模块通讯协议
| 指令 | 说明 | 例子 | 备注 | ||||
| $mtype:x# | 配置电机的型号 | $mtype:1# |
x:是电机的类型 数值代表的电机类型 1: 520电机 2:310电机 3: TT电机(带有编码器的) 4: TT电机(不带编码器) |
||||
| $deadzone:xxxx# | 配置电机的pwm脉冲死区 | $deadzone:1650# |
xxxx:是死区的值, 这个需要测量得出,可通过改变此值 消除电机最小震荡。死区值的范围 (0-3600) |
||||
| $mline:xx# | 配置电机的相位线 | $mline:13# |
xx:这个是电机的减速比参数, 此值需要查商家电机的参数表可得 |
||||
| $wdiameter:xx# | 配置轮子的直径 | $wdiameter:50# |
xx:这个是轮子的直径, 此值可以测量或者用商家的信息 得出 |
||||
| $MPID:x.xx,x.xx,x.xx# | 配置pid参数 | $MPID:1.5,0.03,0.1# |
x.xx,x.xx,x.xx:这个分别是控制 电机p ,i ,d 的参数 每对数值进行一次变更, 芯片会重启, 会把正在运动的电机停止。 属于正常情况 |
||||
| $flash_reset# | 恢复出厂 | ||||||
| $spd:0,0,0,0# | 控制4个电机的速度 | $spd:100,-100,0,50# |
0,0,0,0 :代表板子丝印上的 M1,M2,M3,M4。 速度的范围为(-1000~1000) 超出范围无效 |
||||
| $pwm:0,0,0,0# | 控制4个电机的pwm输出 | $spd:0,520,300,800# |
0,0,0,0 :代表板子丝印上的 M1,M2,M3,M4。速度的范围 为(-3600~3600) 超出范围无效 |
||||
| $upload:0,0,0# | 接收编码器数据 | $upload:1,0,0# |
$upload:0,0,0#:第一个0代表的是 :轮子转动的总编码器数据 第二个0代表的是:轮子转动实时 转动编码器数据(10ms) 第三个0代表的是:轮子的速度 |
||||
| $read_flash# | 查询flash变量 | ||||||
| $read_vol# | 查询电池电量 | ||||||
4.Arduino读取编码器数据
- 串口通讯中,发送下面命令即可让驱动模块不断发送编码器数据,返回信息格式为:
- "$MAll:M1,M2,M3,M4#",所以在Arduino中需要接收到这段数据格式后进行处理。
| $upload:1,0,0# | 接收编码器数据 |
-
编码器初始化
void initEncoders(){ left_count = 0L; right_count = 0L; serial_left_count=0L; serial_right_count = 0L; Serial2.println("$upload:1,0,0#"); }- 在setup()中会进行编码器初始化,因此在初始化时向驱动模块发送接收编码器命令。
-
编码器数据处理
-
- 编码器数据在ROS中会不断轮询
- 当读取到MAII协议头时进行编码器数据处理
- 在核心函数readEncoder()中,将读取到的四个电机编码器值写入数组。
- 将四路编码器数据合并成两路,根据与ROS通信格式处理为字符串并return。
-
#elif defined MY_ARDUINO_COUNTER volatile long left_count = 0L;//左轮计数器 volatile long right_count = 0L;//右轮计数器 volatile long serial_left_count = 0L;//左前轮电机驱动器中的编码器数据 volatile long serial_right_count = 0L;//右前轮电机驱动器中的编码器数据 // 全局变量定义 #define RXBUFF_LEN 64 uint8_t g_recv_buff[RXBUFF_LEN] = {0}; bool g_recv_flag = false; int Encoder_Now[4] = {0}; String lastEncoderValues = "0 0"; // 持久化存储上次有效值 // 协议验证函数 bool validate_protocol(const char* data) { // 协议头快速验证 if(strncmp(data, "MAll:",5) != 0) return false; // 参数格式验证 const char* p = data + 5; for(int seg=0; seg<4; seg++) { if(*p == '-') p++; // 符号检查 bool has_digit = false; while(isdigit(*p) || *p == '.') { if(isdigit(*p)) has_digit = true; p++; } if(!has_digit || (seg<3 && *p++ != ',')) return false; } return *p == '\0'; } // 串口接收中断服务程序 void serialEvent2() { static bool capturing = false; static uint8_t idx = 0; while(Serial2.available()) { char c = Serial2.read(); if(c == '$') { capturing = true; idx = 0; continue; } if(capturing) { if(c == '#') { // 帧结束处理 capturing = false; g_recv_buff[idx] = '\0'; if(validate_protocol((char*)g_recv_buff)) { g_recv_flag = true; } break; } if(idx < RXBUFF_LEN-1) { g_recv_buff[idx++] = c; } else { // 缓冲区溢出保护 capturing = false; idx = 0; } } } } // 核心数据解析函数 String readEncoder() { static unsigned long lastUpdate = 0; const unsigned long TIMEOUT = 100; // 100ms超时 if(g_recv_flag) { // 提取M1-M4参数 char* dataStart = (char*)g_recv_buff + 5; char* params[4]; uint8_t paramIndex = 0; // 快速逗号分割 params[paramIndex++] = dataStart; for(char* p = dataStart; *p && paramIndex<4; p++) { if(*p == ',') { *p = '\0'; params[paramIndex++] = p+1; } } // 更新编码器值 if(paramIndex == 4) { Encoder_Now[0] = atoi(params[0]); // M1 Encoder_Now[1] = atoi(params[1]); // M2 Encoder_Now[2] = atoi(params[2]); // M3 Encoder_Now[3] = atoi(params[3]); // M4 // 更新持久化值 lastEncoderValues = String((Encoder_Now[0]+Encoder_Now[1])/2) + " " + String((Encoder_Now[2]+Encoder_Now[3])/2); lastUpdate = millis(); } g_recv_flag = false; } // 超时处理 if(millis() - lastUpdate > TIMEOUT) { return lastEncoderValues; } return lastEncoderValues; }
5.电机速度控制
- setup()中需要将电机初始化,因此向驱动模块发送速度0指令,使电机锁死
void initMotorController() {
Serial2.println("$spd:0,0,0,0#");
}- ROS中,通过m x x 发送电机控制指令,所以在Arduino只需要将左右轮控制指令分别分配给四个电机即可
void setMotorSpeeds(int leftSpeed, int rightSpeed) {
// 安全格式化(带缓冲区溢出保护)
sprintf(send_buff,"$spd:%d,%d,%d,%d#",leftSpeed,leftSpeed,rightSpeed,rightSpeed);
// 可靠串口传输
Serial2.println(send_buff);
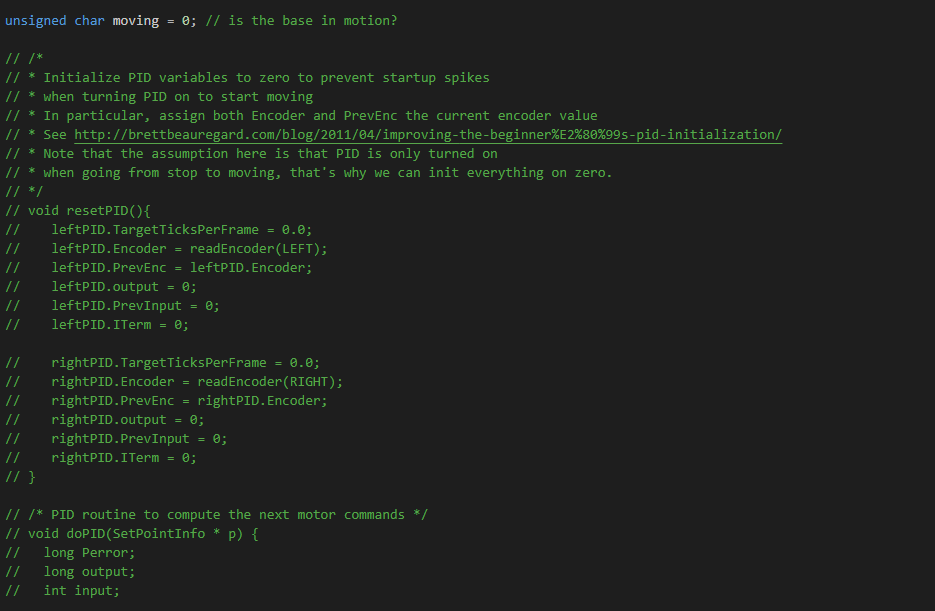
}- 驱动模块自带PID,不再需要用Arduino计算,直接将diff_controller.h代码注释,只留一个移动状态变量

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 10
10 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)