【3D视觉入门系列】点云数据全解析:典型处理流程与可视化指南
一文带你深入理解点云的典型处理流程和可视化工具
想了解点云是啥、怎么处理、有哪些格式和可视化工具?本篇文章带你深入理解点云的典型处理流程。
一、什么是点云
1.1 点云的定义
在数字化世界中,点云数据代表了物体表面的三维空间信息,它通过记录每个采样点的位置坐标来重现物体或场景的细节。
点云(Point Cloud)是三维空间中大量离散的空间点集合,每个点通过 (x, y, z) 坐标来表示其空间位置。部分点云数据还可能附带额外属性,如:颜色(RGB值)、反射强度(LiDAR反射回波强度)、法向量(描述表面朝向)
1.2 点云的来源与采集方式
点云数据是通过激光扫描、结构光扫描、摄影测量等方法获得的。
激光扫描是通过激光器发射脉冲激光并接收反射信号,结合传感器的位置和角度信息,计算出点的位置坐标。
结构光扫描则是通过投影特定的光条纹到物体表面,再利用相机拍摄变形的光条纹,从而计算出物体表面的三维坐标。
摄影测量则是通过多角度拍摄照片,利用照片间的重叠信息和相机参数,通过计算机视觉技术重建场景的三维结构。具体的方式如下:
| 方式 | 简介 | 应用 |
|---|---|---|
| 激光雷达(LiDAR) | 主动发射激光,测量飞行时间获取点位置 | 自动驾驶、测绘 |
| RGB-D相机 | 获取RGB图像+深度depth图,结合可生成点云 | 手势识别、AR |
| 多视图重建 | 从多角度2D图像恢复3D结构(SfM/SLAM) | 无人机测图 |
| 结构光 / TOF | 近距离高精度点云(如iPhone深度镜头) | 人脸扫描 |
1.3点云的格式
通常以不同的格式存储,其中PCD(Point Cloud Data)和BIN(Binary)是两种常见的格式,用于表示三维点云数据。
PCD格式是一种常见的开放式点云数据存储格式:通常是文本文件,以ASCII或二进制形式存储。ASCII格式易于阅读和编辑,但文件较大。PCD文件包含点云的几何信息和属性信息,如点的坐标、颜色、法线等。它还可以包含元数据,以描述点云的特性,如坐标系、点云类型等。
BIN格式是一种更底层的点云数据存储格式,通常以二进制形式存储,因此在文件中的数据较紧凑,适用于大型点云数据的存储。与PCD不同,BIN格式通常不包含元数据,因此在读取时需要额外的信息来解释数据,如点的数量和坐标表示。
二、点云处理流程
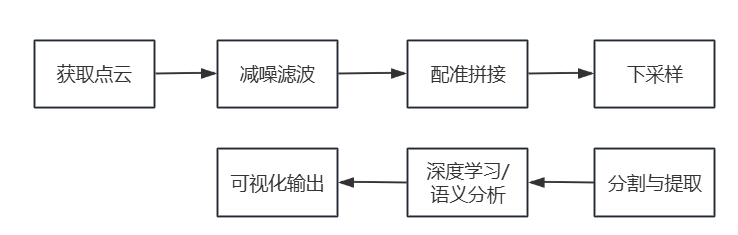
2.1 清洗和去噪
目的:剔除传感器误差、孤立点、重复点,提高点云质量。点云数据在获取过程中往往会混入一些噪声,包括外界环境的干扰、设备的误差等。数据的清洗和去噪是预处理的重要步骤。清洗包括去除无效点、归一化数据等操作,而去噪则是指去除那些不反映物体表面真实特征的噪声点。
去噪方法:统计滤波(Statistical Outlier Removal, SOR)、半径滤波
适用场景:点云稠密但夹杂随机误差、采集环境复杂,如树叶、雾气等干扰多。
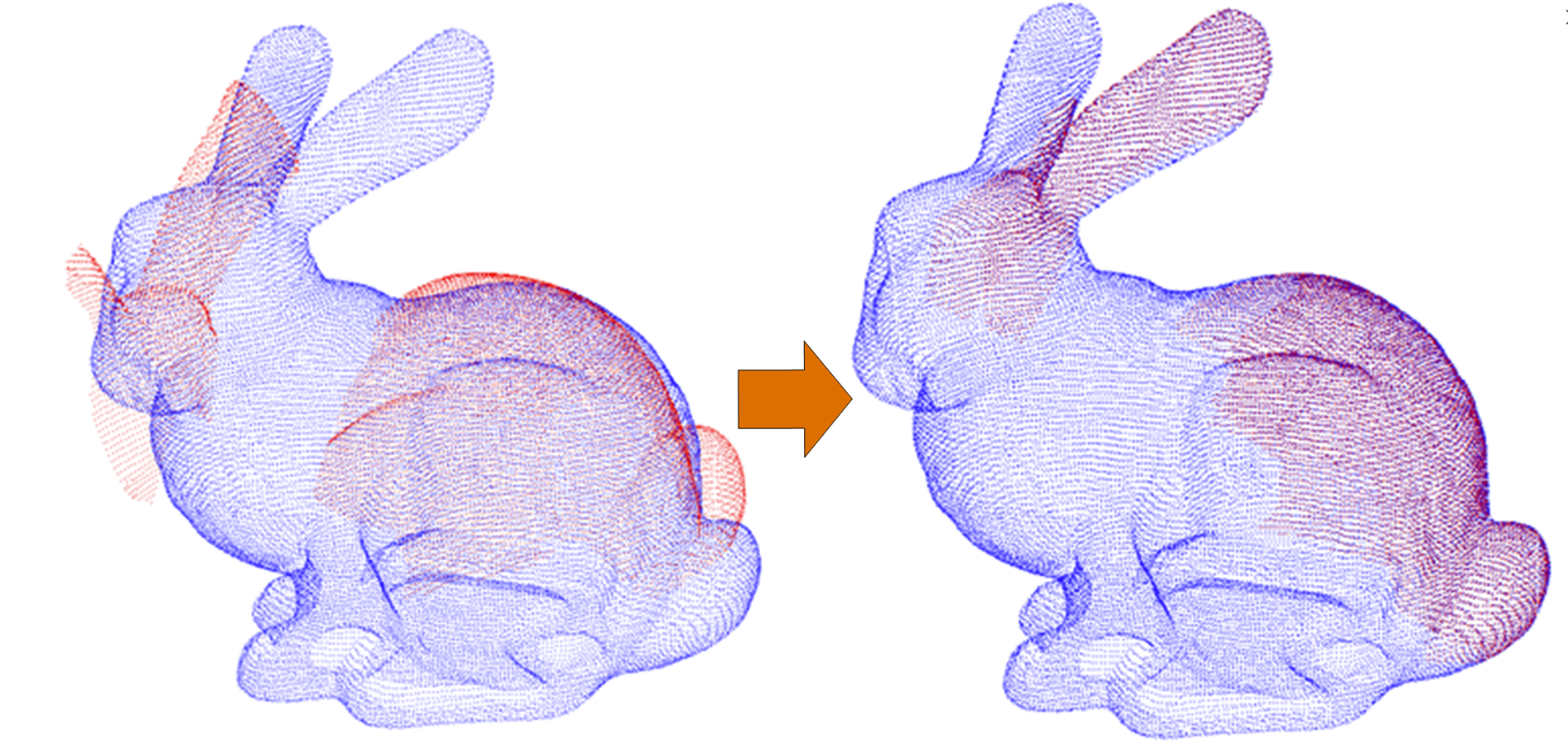
2.2 点云配准与拼接
配准是将两个或多个来自不同视角的点云数据集对齐到统一坐标系中的过程。拼接则是指将经过配准的多个数据集合并,形成一个全局的、连贯的三维模型
ICP算法(Iterative Closest Point):通过最小化点云之间的距离来估计刚体变换矩阵
关键点 + 特征匹配法:通过提取点云特征(如FPFH、SIFT等),建立描述符,然后在不同的点云数据集中寻找匹配特征对,并利用这些对进行对齐。
注意:
①ICP只能处理刚体配准,要求有较好初始位置;
②多视角拼接时可能引入累积误差(可配合全局优化)
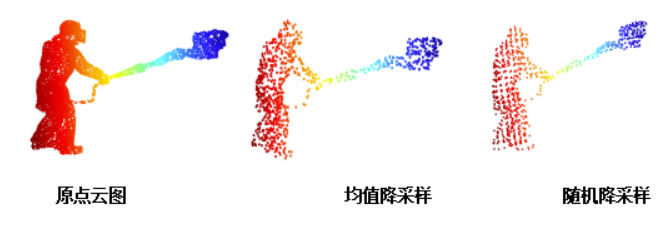
2.3 下采样
目的:降低点云密度,加快算法速度;保留结构信息,压缩数据量。
方法:
体素网格采样(Voxel Grid):①将点云空间划分为立方格子(Voxel)②每格中只保留一个代表点(通常取平均坐标)。类似“空间上的图片压缩”
FPS(Farthest Point Sampling):从种子点开始,每次选距离当前已选点最远的点。常用于深度学习训练样本均匀覆盖
对比:
| 方法 | 保留结构 | 速度 | 均匀性 |
|---|---|---|---|
| Voxel Grid | 较强 | 快 | 一般 |
| FPS | 较强 | 慢 | 最优 |
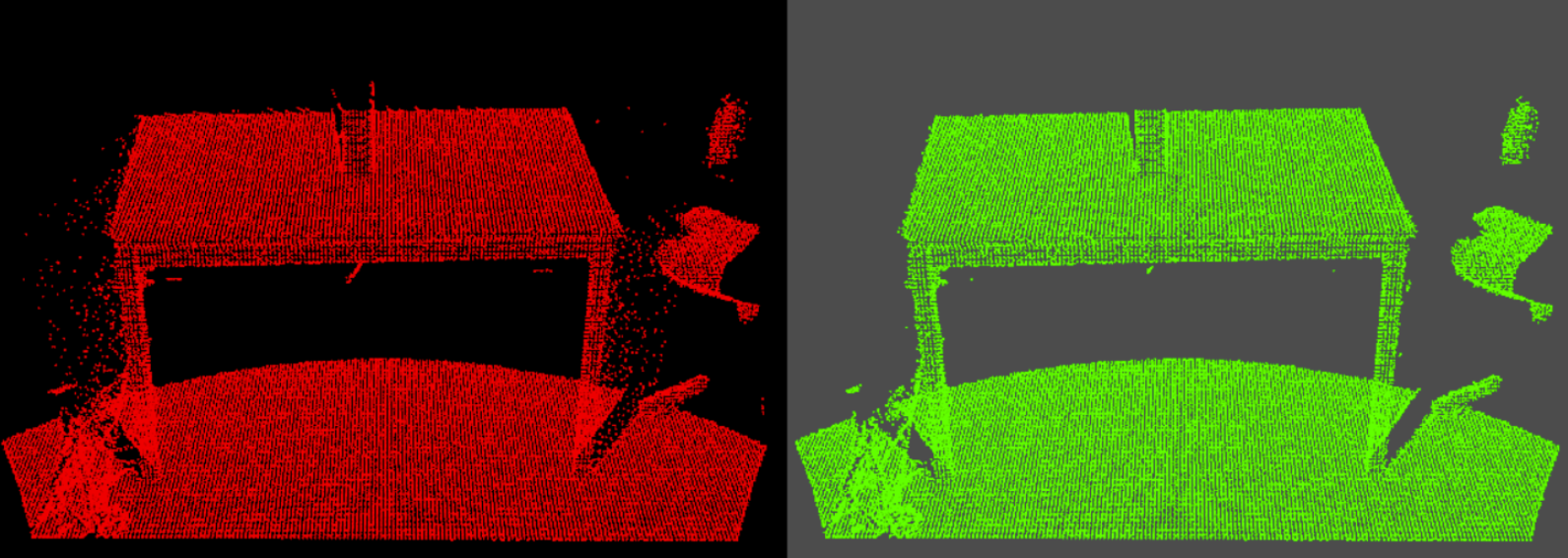
2.4 点云分割与提取
点云分割是指将点云数据集分解为多个子集的过程,每个子集代表了场景中的一个物体或结构。从复杂点云中提取特定目标区域:如地面、墙体、物体等。
方法:
平面提取(RANSAC):随机选点构建模型 → 判断符合模型的点数 → 多次迭代。适合地面提取、墙面识别等。
区域生长(Region Growing):从种子点开始,向周围相似法向量的点扩展。适合提取连续曲面或同类物体。
点云聚类(如DBSCAN):基于密度的空间聚类,适合提取多个独立物体;能识别数量不确定的物体簇。
三、点云可视化工具推荐
3.1 Open3D(推荐)
优点:Python/C++双接口、轻量易用,支持滤波/采样/配准等处理、配套3D窗口交互性强
3.2 其他工具对比
| 工具 | 特点 | 适合用户 |
|---|---|---|
| CloudCompare | 图形化界面强大 | 非程序员友好 |
| MeshLab | 支持网格构建/编辑 | 多用于后期处理 |
| PCL + VTK | C++生态,功能强大 | 高性能、工程化需求 |
| Potree(Web) | Web端点云浏览器 | 大规模点云展示 |
四、处理点云的常见问题
-
点太稠密 → 处理慢,建议先下采样
-
点太稀疏 → 特征提取困难,需增强/插值
-
点云无方向(没有法向量)→ 某些处理无法使用,需估算
-
多视角点云配准困难 → 初始姿态估计尤为重要
如果你觉得这篇文章对你有帮助,欢迎点赞、收藏、评论交流!接下来将带你深入剖析 PointNet 网络的构造与实现,敬请期待!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 2
2 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)