Body2Hand开源论文解析
Body2Hand开源论文解析
·
输入为肩部六关节的归一化rot6d,可选输入为手部图片,输出为手部21*2个关节的轴角(初始输出也为归一化rot6d,经过反向变换后,经过矩阵到轴角)。
下面是该论文中几个关节定义的说明:首先他采用了一个非常不常见的模型Adam来做姿态重建,手部关节纯属猜测
body2hands开源论文中肩肘六关节的可能定义顺序:
full_bodies2.npy: (N x T x 36) array.
- each 36D feature can be broken down into a 6x6 matrix, where the 6 joints referring to the arms are expressed in 6D rotation space.
- The 6 joints are as follows:
- 0: left collar,
- 1: right collar,
- 2: left shoulder,
- 3: right shoulder,
- 4: left elbow,
- 5: right elbow
body2hands/scripts at main · facebookresearch/body2hands · GitHub
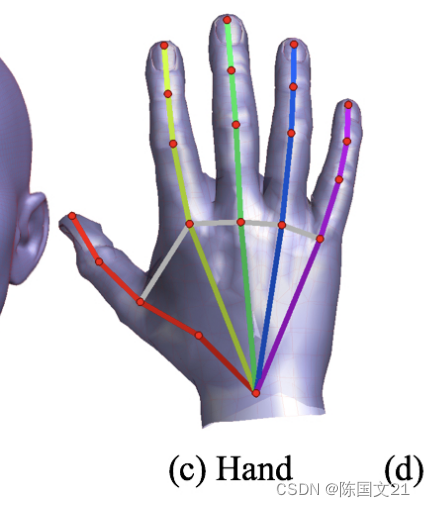
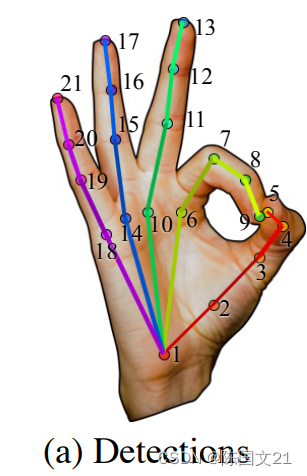
手部关节的定义估计如下所示;
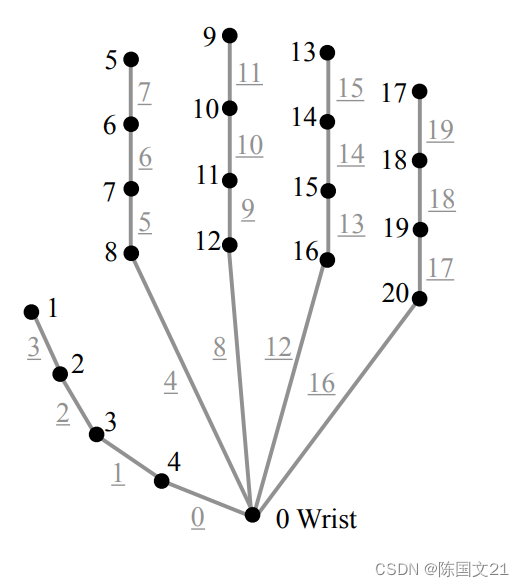
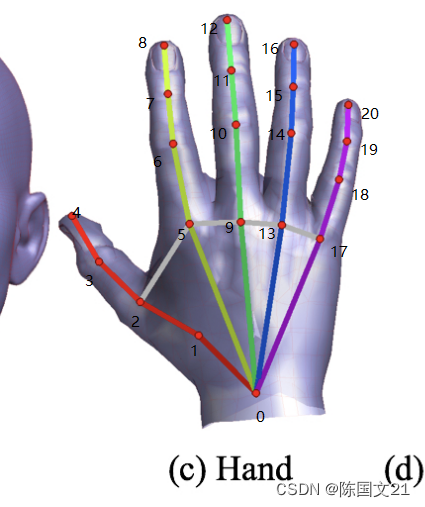
上面这一行的关节点定义应该更加正确
该顺序的来源是CMU的MTC文章的附录:
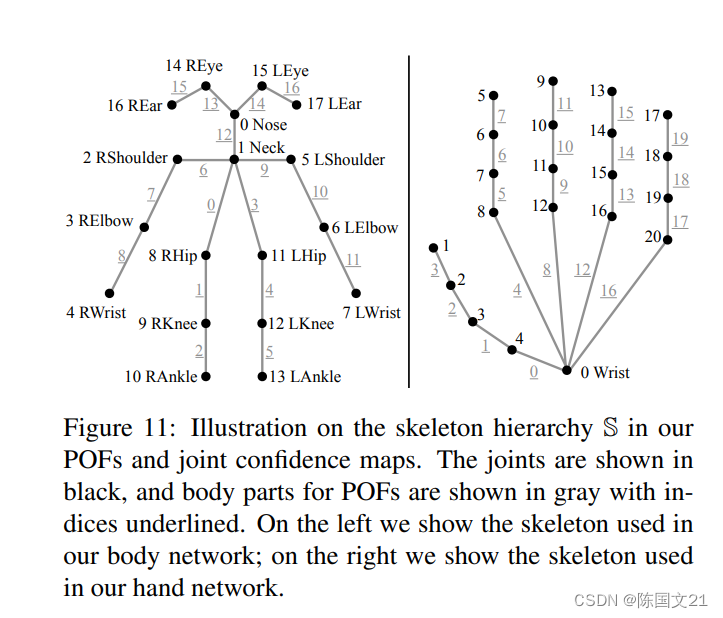
https://arxiv.org/pdf/1812.01598.pdf MTC文章的关节定义 ---

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 0
0 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)