python手写光线追踪(不使用图形学API)——第一期
本文未经允许禁止转载B站:https://space.bilibili.com/455965619作者:Heskey0 / 赫斯基皇一.布置场景场景中总共有9个物体6个 plane1个 box1个 sphere1个 light我将在此章节介绍这些物体相关的计算注意:我们首先计算光线命中这些物体的点和光源到命中点的距离1.plane要表示一个plane,可以通过 点法式,所以我们总共需要两个数据po
本文未经允许禁止转载B站:https://space.bilibili.com/455965619作者:Heskey0 / 赫斯基皇
一.布置场景
场景中总共有9个物体
- 6个 plane
- 1个 box
- 1个 sphere
- 1个 light
我将在此章节介绍这些物体相关的计算
注意:我们首先计算光线命中这些物体的点和光源到命中点的距离
1.plane
要表示一个plane,可以通过 点法式,所以我们总共需要两个数据
position : plane的位置
normal : plane的法向量
(1)我们首先计算光线与plane是否相交,并且求出此交点
在此之前,我们还需要传入另外两个表示光线的数据
position : 光源的位置
direction : 光的方向
注:d和norm均为 单位向量
def intersect_plane(pos, d, p, norm):
dist = inf
hit_pos = ti.Vector([0.0, 0.0, 0.0])
denom = d.dot(norm)
if abs(denom) > 0.0001: # 光与平面不平行
dist = norm.dot(p - pos) / denom
hit_pos = pos + d * dist
return dist, hit_pos
在这段代码中,我们传入参数 light_position, light_direction, plane_position, plane_normal,然后返回 命中点到光源的距离,命中点坐标
由于d和norm为单位向量,所以denom即d和norm夹角的cosine值,如果denom的绝对值 = 0,那么光线与平面不相交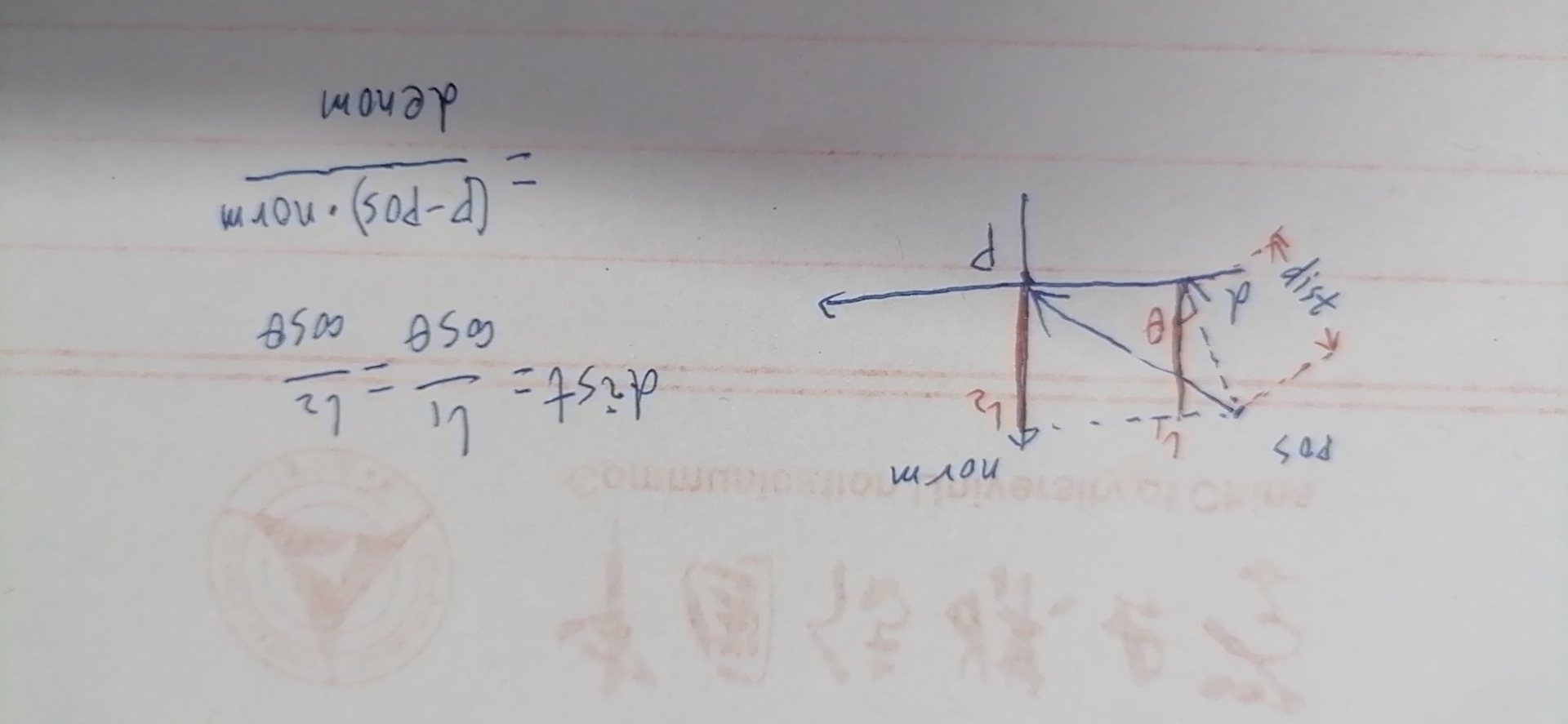
由l1=l2,denom=cos(θ)求出dist,最后根据dist求出hit_pos
2.sphere
要表示一个空间中的球,我们总共需要两个数据
position : 球的坐标
radius : 球的半径
代码如下:传入数据为pos:light_position 和 d:light_dir
def intersect_sphere(pos, d, center, radius):
# 构建余弦定理三角形:判断光与球是否相交
T = pos - center
A = 1.0
B = 2.0 * T.dot(d)
C = T.dot(T) - radius * radius
delta = B * B - 4.0 * A * C
dist = inf
hit_pos = ti.Vector([0.0, 0.0, 0.0])
if delta > 0: # 有解
delta = ti.max(delta, 0)
sdelta = ti.sqrt(delta)
ratio = 0.5 / A
ret1 = ratio * (-B - sdelta) # 方程的解, 即三角形的边长(离入射光近的点)
dist = ret1
hit_pos = pos + d * dist
return dist, hit_pos
在这段代码中,我们构建了一个三角形,它的三条边为
- 光源 与 球心 的连线
- 光源 与 命中点 的连线
- 命中点 与 球心 的连线
对第3条边使用余弦定理得到一个方程组
代码中A,B,C为二元一次方程Ax^2 + Bx + C = 0的系数,用二元一次方程的求根公式可求出第2条边的长度,即dist,最后根据dist求出hit_pos
3.box
要表示一个box,我们需要的不仅仅是坐标数据,因为 box的旋转与缩放不可忽略 ,所以我们首先介绍box的矩阵变换
注:对矩阵原理不熟悉的读者可先学习 《计算机图形学》 ,这里不做赘述
(1)点的变换
def point(m, p):
hp = ti.Vector([p[0], p[1], p[2], 1.0])
hp = m @ hp
hp /= hp[3]
return ti.Vector([hp[0], hp[1], hp[2]])
(2) 向量的变换
def vec(m, v):
hv = ti.Vector([v[0], v[1], v[2], 0.0])
hv = m @ hv
return ti.Vector([hv[0], hv[1], hv[2]])
(3) 光线与box的相交计算
def intersect(box_min, box_max, o, d): # box_min, box_max, pos(box空间), ray_dir(box空间)
intersect = 1 # 光与box是否相交
near_t = -inf
far_t = inf
near_face = 0
near_is_max = 0
for i in ti.static(range(3)): # ti.static(range()) can iterate matrix elements
if d[i] == 0: # 光平行于包围体的一个面
if o[i] < box_min[i] or o[i] > box_max[i]:
intersect = 0
else:
i1 = (box_min[i] - o[i]) / d[i] # 处理该维度的坐标
i2 = (box_max[i] - o[i]) / d[i]
new_far_t = max(i1, i2) # box检测时, 为i2
new_near_t = min(i1, i2) # box检测时, 为i1
new_near_is_max = i2 < i1 # box检测时, 为true
far_t = min(new_far_t, far_t) # box检测时, 为i2三个维中最小的值
if new_near_t > near_t: # near_t 为i1三个维中最大的值
near_t = new_near_t
near_face = int(i) # 记录最小的i所在的维
near_is_max = new_near_is_max # 在当前维中near_t, i2<i1 ?
near_norm = ti.Vector([0.0, 0.0, 0.0])
if near_t > far_t:
intersect = 0
if intersect:
for i in ti.static(range(2)):
if near_face == i:
near_norm[i] = -1 + near_is_max * 2
return intersect, near_t, far_t, near_norm # 是否相交,
# box
def intersect_transformed(box_min, box_max, o, d):
# 射线转换到包围体的local position
obj_o = mat_mul_point(box_m_inv, o)
obj_d = mat_mul_vec(box_m_inv, d)
intersect, near_t, _, near_norm = intersect(box_min, box_max, obj_o, obj_d)
if intersect and 0 < near_t:
near_norm = mat_mul_vec(box_m_inv_t, near_norm)
else:
intersect = 0
return intersect, near_t, near_norm
对代码的解释都写在注释里面了,还请大家耐心阅读
4.light
在此文中使用的light是方形的,light其实就是一个box,我们只需要复用上面的代码即可
def intersect_light(pos, ray_dir, tmax):
hit, t, far_t, near_norm = intersect_aabb(light_min_pos, light_max_pos, pos, ray_dir)
if hit and 0 < t < tmax:
hit = 1
else:
hit = 0
t = inf
return hit, t

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)