登录社区云,与社区用户共同成长
邀请您加入社区
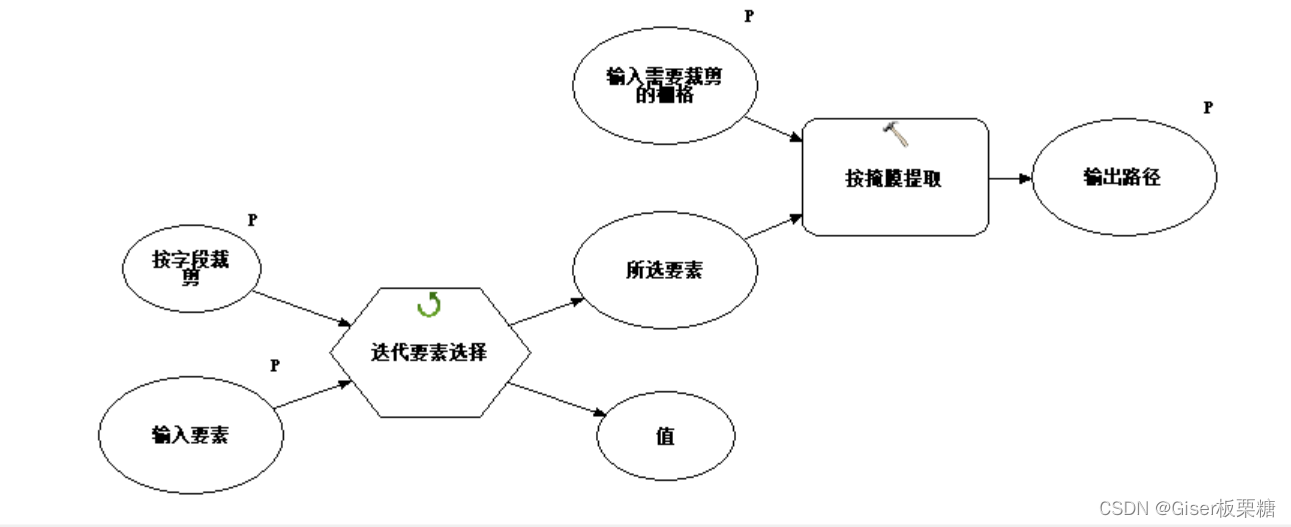
输出路径为路径+%值%.tif
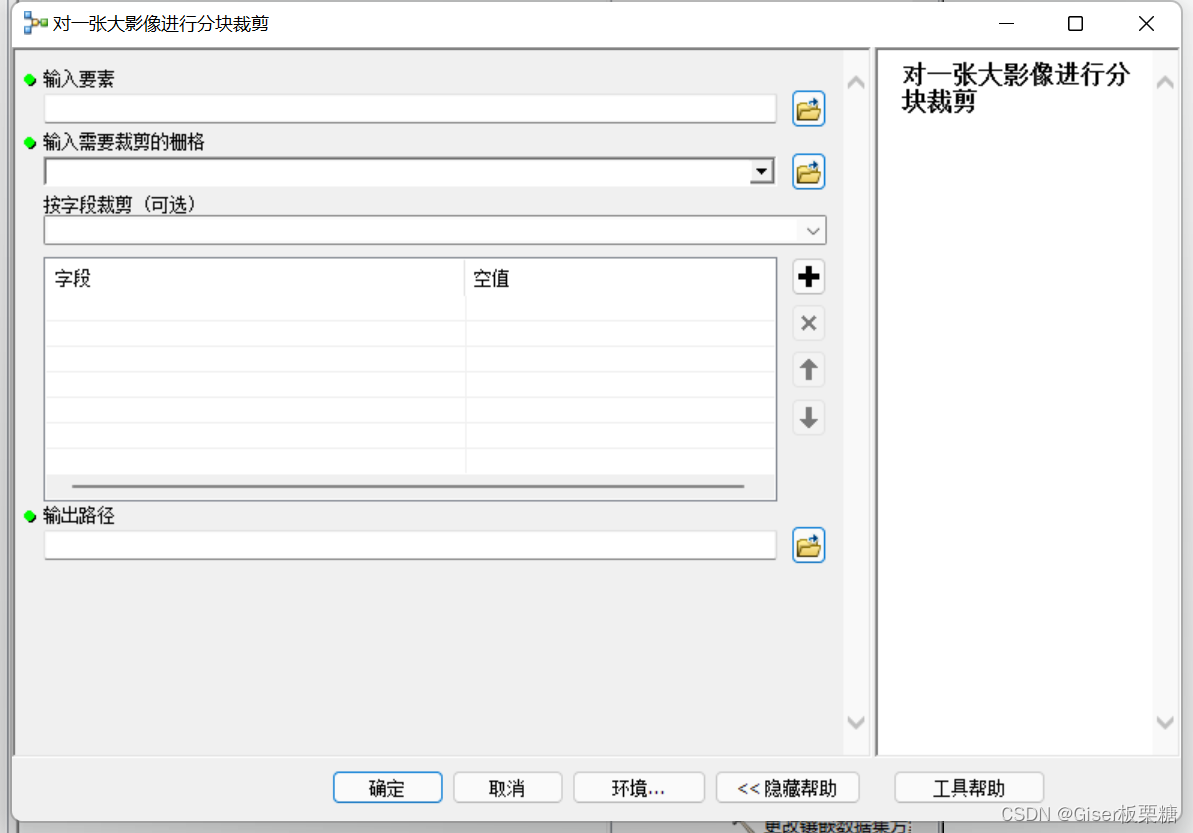
【板栗糖】arcmap模型构造器—批量裁剪栅格数据具体流程
显示情况
特殊参数设置
DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
ROS2小车调试记录
查询系统版本ROS 2(Robot Operating System 2)中的工作空间(Workspace)是组织和管理 ROS 2 软件包(packages)的核心目录结构。它类似于一个“项目文件夹”,用于存放源代码、编译产物、依赖配置等,是开发、构建和运行 ROS 2 节点的基础环境。每个机器人可能有很多功能,比如移动控制、视觉感知、自主导航等,如果我们把这些功能的源码都放到一起当然也是可以的
【论文自动阅读】Fast-ThinkAct: Efficient Vision-Language-Action Reasoning via Verbalizable Latent Planning
本文提出了一种名为 Fast-ThinkAct 的框架,通过将复杂的思维过程压缩成紧凑的“潜意识”向量,让机器人既能像人类一样思考规划,又能像本能反应一样快速执行动作。
【论文自动阅读】LLARVA: Vision-Action Instruction Tuning Enhances Robot Learning
本文提出了一种名为LLARVA的模型,通过将机器人的动作转化为2D视觉轨迹并与语言指令结合,让机器人能通过视觉和语言理解来学习和执行各种任务。
扫一扫分享内容






 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)