使用 Isaac Sim 模拟机器人
探索 Isaac Sim 界面:熟悉 Isaac Sim 界面的关键组成部分,包括面板、上下文菜单和工具栏。掌握这些基础知识后,您将能高效地在模拟环境中构建和管理机器人模型。构建一个简单的机器人模型:通过组装底盘、轮子和关节等组件来构建一个基础机器人。这包括创建可视网格并配置物理属性,以在 Isaac Sim 中模拟真实的物理交互。配置物理属性:设置物理场景并应用必要的属性,确保机器人能够真实地与
前言
将 2D 激光雷达数据从 Isaac Sim 流式传输至 ROS 2,并通过 RViz 进行可视化。通过激光雷达数据监控机器人与环境的交互,从而在仿真环境中提升机器人的感知能力。


概览
欢迎来到 入门指南:在 Isaac Sim 中模拟您的第一个机器人 课程。我们将一起探索机器人模拟的世界,使用 NVIDIA Isaac Sim 在模拟环境中动手实践构建、控制机器人并访问数据的全过程。
以下是对文档核心内容的详细总结,涵盖Isaac Sim机器人仿真的全流程:
一、课程核心目标
通过Isaac Sim实现机器人仿真全流程,包括建模、控制、感知及数据流传输:
- 基础操作:掌握界面导航、场景搭建与物理引擎配置
- 机器人构建:从零组装带关节的移动机器人
- 控制实现:通过OmniGraph和ROS 2实现运动控制
- 感知增强:集成RGB相机与2D激光雷达
- 数据管道:将传感器数据流式传输至ROS 2并在RViz可视化
二、关键模块详解
1. 基础操作与机器人构建
- 界面导航:
- 核心面板:Stage(场景树)、Properties(属性)、Viewport(视口)
- 视口操作:右键+WASD移动视角,滚轮缩放,中键平移
- 重要菜单:Create(创建几何体/物理对象)、Examples(预置案例)
- 物理仿真配置:
- 必需组件:Physics Scene(物理场景)提供重力等基础物理规则
- 物体交互:为物体添加Rigid Body with Colliders Preset(刚体+碰撞网格)
- 地面支撑:通过Ground Plane防止物体无限下落
- 机器人组装:
- 层级结构:使用Xform作为父节点管理底盘和轮子
- 关节驱动:
- 添加Revolute Joint(旋转关节)连接轮子与底盘
- 后轮配置Angular Drive(角驱动)并设置速度(如50 rad/s)和阻尼(如10,000)
2. 运动控制实现
- 差速控制器:
- 前置条件:为机器人添加Articulation Root(关节根节点)
- 创建路径:Isaac Utils > Common Omnigraphs > Differential Controller
- 关键参数:轮半径(如0.375m)、轮距(如1.5m)、驱动关节名称
- 键盘控制:
- 启用:在差速控制器中设置Use Keyboard Control=True
- 键位映射:W/S控制线速度,A/D控制角速度
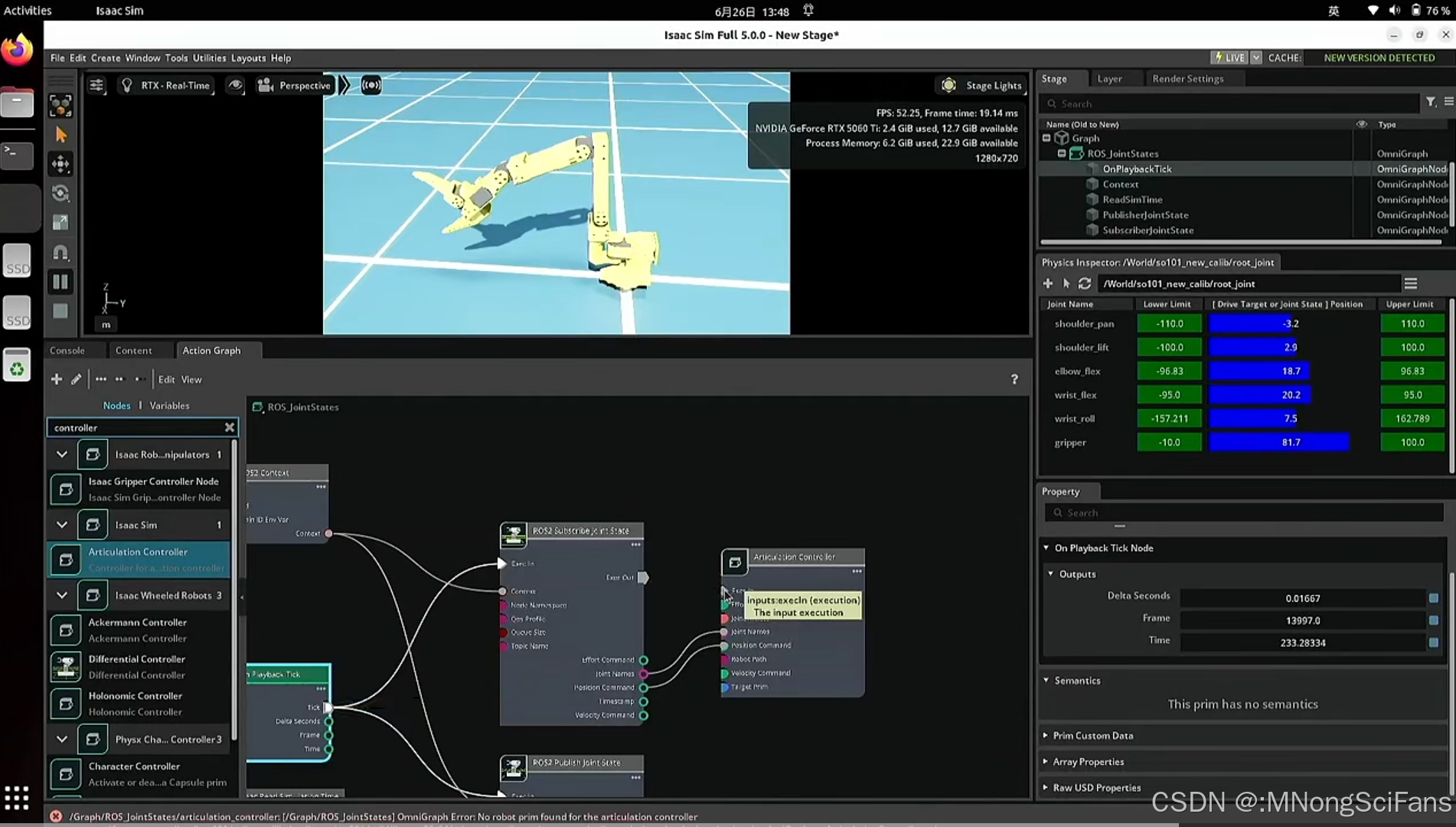
- OmniGraph节点解析:
- On Playback Tick:逐帧触发计算
- Differential Controller:根据输入计算速度指令
- Articulation Controller:执行关节运动控制
3. 传感器集成
- 传感器安装架:
- 创建Front_Sensor作为父Xform,添加Rigid Body确保随机器人移动
- 可视化:用缩小的立方体(0.1×0.1×0.1)标记位置
- RGB相机:
- 创建:Create > Camera,旋转-90°(Y轴)面向前方
- 调试:通过多视口(Window > Viewport > Viewport 2)同步观察场景和相机视角
- 2D激光雷达:
- 添加:Isaac > Sensors > PhysXLidar > Rotating
- 可视化:启用Draw Lines和Draw Points显示检测结果
- 避坑:障碍物需添加刚体碰撞网格才能被检测
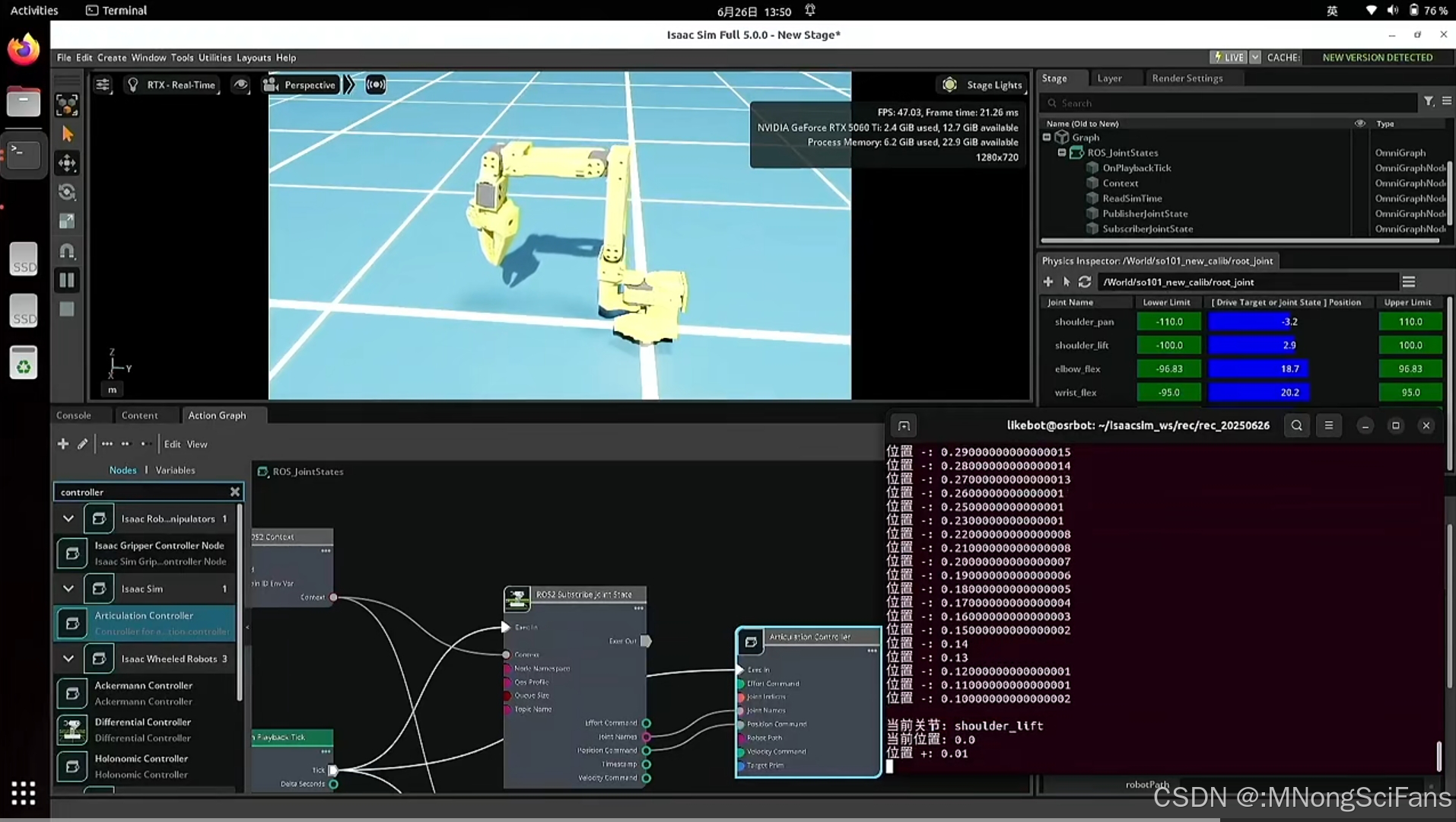
4. ROS 2数据流传输
- 环境配置:
- 安装ROS 2 Humble(Ubuntu 22.04)及vision_msgs依赖包
- 启动Isaac Sim时加载ROS环境:source /opt/ros/humble/setup.bash
- 启用扩展:Window > Extensions > ROS2 Bridge
- 激光雷达数据流:
- ActionGraph节点链: Isaac Read Lidar Beams → ROS2 Publish Laser Scan(Topic名如scan_lidar)
- Isaac Read Simulation Time同步时间戳
- RViz可视化:
- 固定坐标系(Fixed Frame)匹配激光雷达FrameID(如sim_lidar)
- 添加LaserScan显示类型
- ActionGraph节点链: Isaac Read Lidar Beams → ROS2 Publish Laser Scan(Topic名如scan_lidar)
- 常见问题:
- 数据未传输:检查节点连接和Topic名称
- RViz无显示:确认FrameID一致性及障碍物物理属性
三、课程成果
完成本课程后,您将能够:
- 独立构建带关节驱动的移动机器人模型
- 通过差速控制器和键盘实现精准运动控制
- 集成多传感器(RGB相机+激光雷达)并调试可视化
- 建立Isaac Sim→ROS 2数据管道,在RViz实时监控
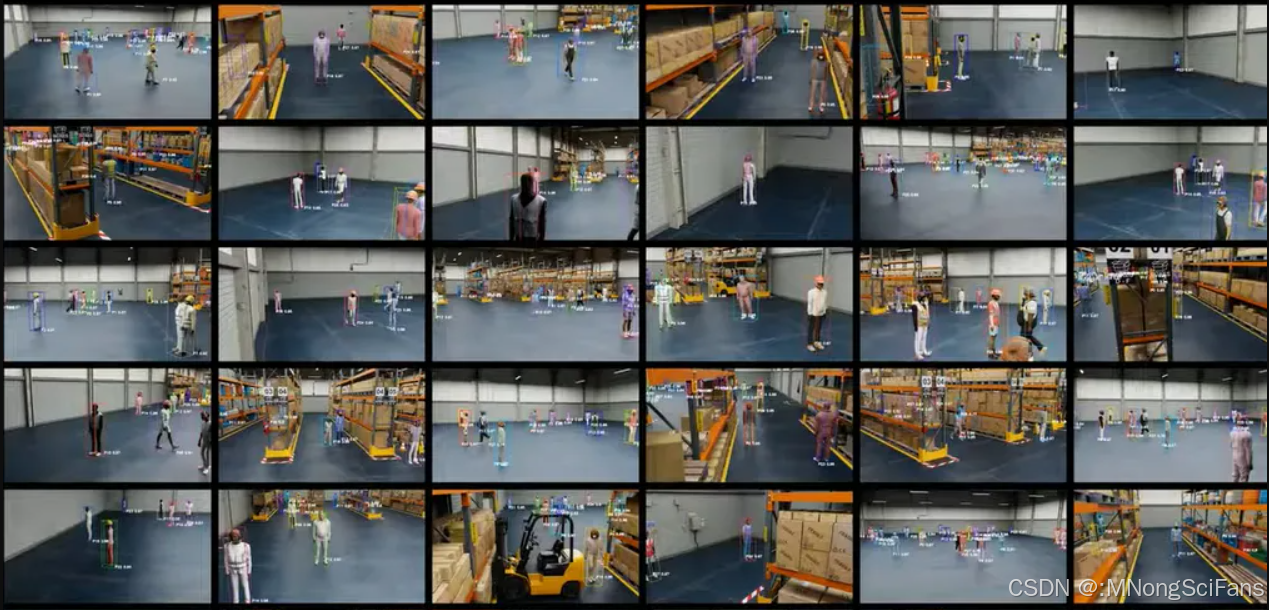
- 应用技能到高阶场景:合成数据生成、HIL测试、Sim-to-Real迁移
四、延伸学习
- 进阶路径:
- 导入URDF机器人模型
- 生成合成数据训练感知模型
- 结合Isaac ROS开发AI机器人
- 推荐资源:
- NVIDIA DLI实战培训(深度学习与机器人仿真)
- Omnigraph官方文档
- OpenUSD核心概念课程
提示:操作时需注意单位系统(Isaac Sim默认单位为米),物理参数(如阻尼值)需根据机器人规模调整,传感器位姿直接影响数据质量。



在 Isaac Sim 中导入机器人资产并模拟机器人
在 Isaac Sim 中生成用于感知模型训练的合成数据
在 Isaac Sim 中使用软件在环 (SIL) 开发机器人
在 Isaac Sim 中利用 ROS 2 和硬件在环 (HIL) 进行仿真
从仿真到现实世界的机器人学习策略迁移
使用 Isaac ROS 开发 AI 机器人
基于OpenUSD开放标准、生成式AI、计算机图形学和加速计算等尖端技术,可以打造新一代3D数字孪生系统
参见:
为什么全球大厂都在押注OpenUSD?一文说透3D时代的“普通话”革命

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 16
16 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)