目标检测之—— 边框损失函数
目标检测之—— 边框损失函数目标检测的损失函数由两部分组成,置信损失函数,边框回归损失函数。本文记录边框回归损失函数的演变。1.L1/L2 Loss最开始是使用L1/L2 loss ,定义如下,其中输入x为预测值与真实值之差:缺点:L1 Loss 对 x 的导数为常数,训练后期,x很小,反向求导更新权值时,由于x非常小,导数为常数,损失函数会在一个值附近波动,权值没什么变动。L2 Loss在训练初
目标检测之—— 边框损失函数
目标检测的损失函数由两部分组成,置信损失函数,边框回归损失函数。本文记录边框回归损失函数的演变。
1. L1/L2 Loss
最开始是使用L1/L2 loss ,定义如下,其中输入x为预测值与真实值之差: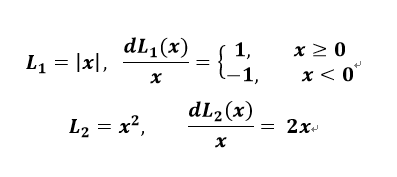
缺点:L1 Loss 对 x 的导数为常数,训练后期,x很小,反向求导更新权值时,由于x非常小,导数为常数,学习率不改变的情况下,损失函数会在一个稳定值附近波动,权值没什么变动。L2 Loss 在训练初期时,x值很大,导数也相应大,在初期训练不稳定。
2. Smooth L1 Loss
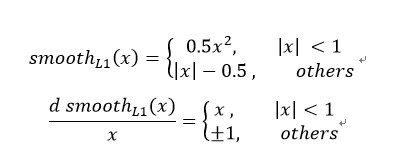
这里结合了L1 Loss和L2 Loss ,在训练初期,即x较大时,用L1 Loss;在训练后期,即x较小时,用L2 Loss.
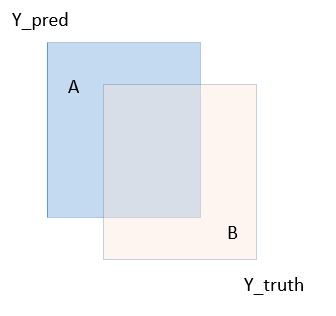
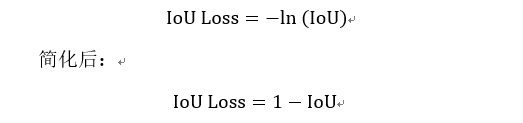
3. IoU Loss
L1/L2 Loss ,Smooth L1Loss 默认输入的值相互独立,即对每个值求损失再相加,这与实际情况不符,针对这一情况IoU被提出:
计算让输入 x,y,w,h相互关联,具备尺度不变性。克服了前面几个损失函数的缺陷。但 IoU Loss也有不足:
1,当真实框与预测框不相交时,IoU 为零,无法反映两个框的远近,也就无法学习不相交的情况。
2,当真实框与预测框相交时,IoU 一样,但他们相交情况可能不一样,如下图所示,两种情况的IoU值相同,但我们认为右边情况要好些,IoU无法反映。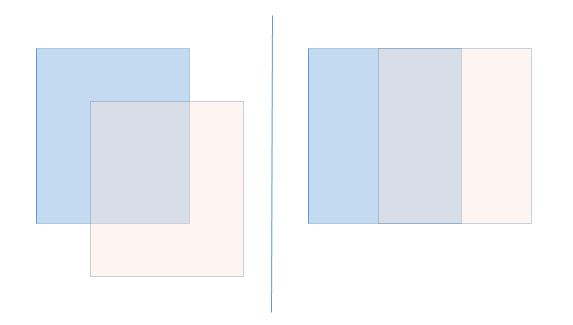
4. GIoU Loss
定义:
其中C 为真实框与预测框的最小外接矩形,用最小外接矩形减去两个框的交集,GIoU 取值范围为[1,-1],当两个框重合时,取最大值1,当两个框不相交时取最小值-1,当两个框相交时,GIoU不仅考虑了重叠部分,也考虑了其他非重叠部分,更好的反映了两个框的重叠情况。
缺点:当预测框完全包含于真实框时,如下图所示,我们默认左边的匹配情况好些,但此时GIoU与IoU值一样,无法学习这类情况。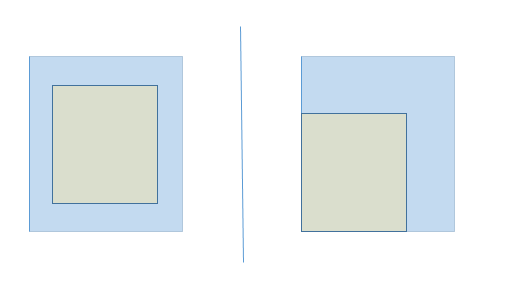
4. DIoU Loss
定义: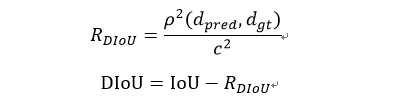
其中d_pred,d_gt分别为预测框和真实框的中心点,p为求欧氏距离,c为最小外接矩形的对角线。
缺点:边框回归三要素 重叠面积,中心点距离和长宽比,DIoU没有考虑长宽比,所以又提出 CIoU 把长宽比考虑了进去。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)