《Games101》计算机图形学学习笔记精华版
简介:计算机图形学是信息科技的一个关键分支,本笔记分享将涵盖基础概念到高级技术,包括二维和三维图形处理、颜色模型、光照原理、图形渲染技术、纹理映射、GPU编程、几何建模、动画和运动学,以及图形API等。这些内容对于游戏开发和相关领域至关重要,目的是让学习者全面深入理解计算机图形学,并为实际项目开发奠定基础。

简介:计算机图形学是信息科技的一个关键分支,本笔记分享将涵盖基础概念到高级技术,包括二维和三维图形处理、颜色模型、光照原理、图形渲染技术、纹理映射、GPU编程、几何建模、动画和运动学,以及图形API等。这些内容对于游戏开发和相关领域至关重要,目的是让学习者全面深入理解计算机图形学,并为实际项目开发奠定基础。 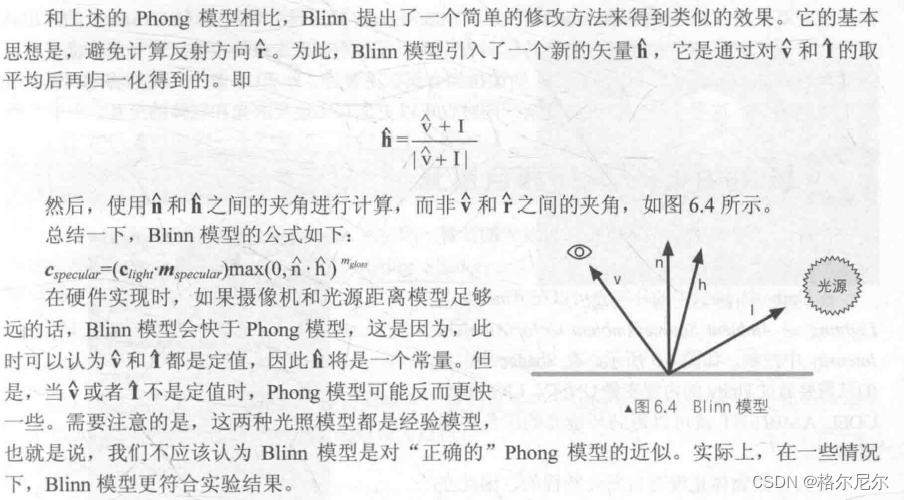
1. 计算机图形学基础概念
计算机图形学作为一门跨学科领域,不仅包含了与计算机软件和硬件相关的技术,还融合了艺术和设计元素。它允许用户通过数字方式创建、处理以及展示图形信息,是计算机科学中不可或缺的一部分。
1.1 图形信息的数字化表示
在计算机图形学中,所有图像都被数字化处理,成为可以通过算法操作的像素集合。图像处理和生成中涉及到的像素操作、图形绘制以及图形变换等,都是以这些数字为基础。
1.2 图形学应用领域
计算机图形学的应用领域极为广泛,包括视频游戏、动画、虚拟现实、医疗成像、模拟训练、视觉艺术和设计等。这些领域中的每一个都依赖于图形学的基础概念和技术来实现各自的目标。
理解计算机图形学的基础概念是深入学习图形学其他高级主题的基石。随着技术的发展,对图形处理的需求也在不断增长,因此,掌握这些基础概念对于任何一个希望在这个领域中发展的人都是至关重要的。
2. 二维和三维图形处理技术
2.1 二维图形处理
2.1.1 基本图形绘制技术
在计算机图形学中,绘制基本图形是构建更复杂场景的基础。这些基本图形包括点、线、圆以及简单多边形等。在二维空间中,这些元素经常用来构造复杂的图形和用户界面。
- 点 :在屏幕坐标系中,点是最简单的图形元素,表示为一个坐标点(x, y)。
- 线 :线可以由两个点定义,是最基本的几何图形之一。线的绘制可以通过算法如Bresenham线算法实现,该算法适用于栅格系统。
- 圆 :圆的绘制通常使用中点圆算法,通过不断选择合适的像素点来近似圆的形状。
- 多边形填充 :对于多边形,通常使用扫描线算法进行填充,逐行计算与多边形边界的交点并填充颜色。
代码示例: 使用Bresenham线算法绘制一条直线。
def bresenham_line(x0, y0, x1, y1):
dx = abs(x1 - x0)
dy = abs(y1 - y0)
x, y = x0, y0
sx = -1 if x0 > x1 else 1
sy = -1 if y0 > y1 else 1
err = dx - dy
points = []
while x != x1 or y != y1:
points.append((x, y))
e2 = 2 * err
if e2 > -dy:
err -= dy
x += sx
if e2 < dx:
err += dx
y += sy
points.append((x, y))
return points
# 使用Bresenham线算法绘制直线
line_points = bresenham_line(10, 10, 30, 30)
# 打印结果坐标点,用于绘图或其他处理
for point in line_points:
print(point)
此代码段首先定义了函数 bresenham_line ,接受两个点的坐标作为输入,并返回通过这两个点的直线上的所有像素点坐标。然后调用这个函数,并打印出结果点坐标。
2.1.2 二维图形的变换方法
二维图形变换是图形学中的核心概念之一,它使得图形可以进行移动、缩放、旋转等操作。常见的变换包括平移、缩放、旋转和错切。
- 平移 :在二维空间中,图形可以通过增加其坐标值进行移动。
- 缩放 :图形可以通过其中心点进行比例放大或缩小。
- 旋转 :图形可以绕原点或任意点进行旋转。
- 错切 :图形的形状在某一个方向上进行倾斜变形。
代码示例: 对于二维图形进行旋转变换。
import numpy as np
def rotate_point_2d(point, angle):
"""旋转二维空间中的一个点"""
angle = np.radians(angle)
x, y = point
cos_theta, sin_theta = np.cos(angle), np.sin(angle)
x_new = x * cos_theta - y * sin_theta
y_new = x * sin_theta + y * cos_theta
return (x_new, y_new)
# 定义一个点
point = (100, 100)
# 定义旋转角度
angle = 45
# 执行旋转
rotated_point = rotate_point_2d(point, angle)
print(rotated_point)
此代码段使用了numpy库中的三角函数来实现二维空间中的旋转。函数 rotate_point_2d 接受一个点和旋转角度作为参数,并返回旋转后的新坐标点。
2.1.3 二维图形的裁剪技术
图形裁剪是图形学中另一个重要话题,它决定了如何在给定的裁剪窗口内显示图形。常见的裁剪技术包括线裁剪、多边形裁剪等。
- 线裁剪 :判断线段与裁剪窗口的关系,保留窗口内的线段部分。
- 多边形裁剪 :多边形的每一部分都可能与裁剪窗口相交,需要计算交点并重新构成新的图形。
代码示例: 实现一个简单的线段与矩形裁剪窗口的裁剪算法。
def clip_line_segment(x0, y0, x1, y1, clip_rect):
"""裁剪线段使其与矩形窗口相交"""
# 确定矩形的四个边界坐标
x_min, y_min, x_max, y_max = clip_rect
# 分类讨论线段与矩形的相对位置
# 省略了具体的裁剪逻辑和坐标点更新的代码
return clipped_segment_start, clipped_segment_end
# 定义线段起点终点和裁剪窗口
line_segment = (10, 10, 100, 100)
clip_window = (20, 20, 80, 80)
# 调用裁剪函数
clipped_segment_start, clipped_segment_end = clip_line_segment(*line_segment, clip_window)
print(f"Cipped segment: {clipped_segment_start}, {clipped_segment_end}")
上述代码示例中,省略了详细的裁剪逻辑,但此函数的基本框架表明了如何接收线段端点和裁剪窗口参数,并返回裁剪后线段的起点和终点。
2.2 三维图形处理
2.2.1 三维空间中的点、线、面表示
在三维空间中,图形的表示更为复杂,但基本单位依然是点、线、面。
- 点 :三维空间中的点表示为(x, y, z)。
- 线 :线在三维中通常由两个点定义,也可以通过向量表示。
- 面 :面可以由三角形、四边形等多边形来近似表示。
三维图形的表示不仅关注其几何特性,还关注其拓扑关系,这是渲染过程中光照和阴影效果计算的关键。
2.2.2 三维图形的变换和投影
三维图形变换包括平移、旋转、缩放等,变换方法比二维图形更加复杂,因为需要考虑三维坐标系。
- 视图变换 :将物体从世界坐标系变换到视图坐标系。
- 投影变换 :将三维世界中的图形投影到二维视图平面。
投影变换又分为正交投影和透视投影。透视投影更能表现真实世界中的视觉效果,因为它模拟了现实中的视觉透视。
2.2.3 三维图形的光线跟踪技术
光线跟踪是一种图像生成技术,用于创建高质量渲染效果,模拟光如何在场景中传播并生成真实的光照和阴影效果。通过追踪光线从视点出发到场景中各物体表面的路径,计算光线与物体相互作用的结果。
光线跟踪需要解决几个关键问题:
- 光线与物体的相交检测 :判断光线是否与场景中的物体相交,以及交点的位置。
- 光的颜色和亮度计算 :计算到达交点的光的颜色和亮度。
- 递归跟踪次级光线 :为了实现更复杂的视觉效果,如反射和折射,需要递归地跟踪次级光线。
光线跟踪技术由于其高质量渲染能力,在电影制作和高端图形设计领域得到广泛应用,但通常计算代价较大。
三维图形处理是计算机图形学中的一个庞大分支,本章仅简要介绍了其中的几个关键点。在实际应用中,还需要深入了解各种算法和技术的细节。
3. 颜色模型与色彩空间转换
颜色模型和色彩空间转换是计算机图形学中的关键概念,它们定义了颜色的表示和计算方式。在本章中,我们将深入探讨这些概念,并提供一些转换色彩数据的实际方法。
3.1 颜色模型理论
颜色模型是用于描述颜色的方式,不同的模型适用于不同的应用场合。在这一部分,我们将详细讨论三种广泛使用的颜色模型:RGB颜色模型、CMYK颜色模型以及HSV色彩模型。
3.1.1 RGB颜色模型
RGB模型是通过红(Red)、绿(Green)、蓝(Blue)三原色的不同强度组合来产生其他颜色的一种颜色模型。它是计算机图形学中最常见的颜色模型,因为计算机显示器使用的是光的加色原理。在RGB模型中,每种颜色都可以由一个介于0到1之间的数字表示,0代表没有光,1代表最大光强。
3.1.2 CMYK颜色模型
CMYK颜色模型主要用于印刷行业,其名称来源于青(Cyan)、洋红(Magenta)、黄(Yellow)和黑(Black)四种油墨的首字母。与RGB不同,CMYK是一个减色模型,它通过吸收光线而不是发射光线来形成颜色。在CMYK模型中,数值越大表示油墨越多,吸收的光线越多,颜色越深。
3.1.3 HSV色彩模型
HSV模型是基于人类对色彩的感知进行组织的,它包括色相(Hue)、饱和度(Saturation)、亮度(Value)三个维度。色相指的是颜色的种类,比如红色、蓝色等;饱和度表示颜色的纯度,亮度则是指颜色的明暗程度。这种模型在图像处理和颜色选取界面中非常受欢迎,因为它更符合人类的视觉感知。
3.2 色彩空间转换
色彩空间转换是将图像从一种颜色模型转换到另一种颜色模型的过程。这一部分将重点介绍RGB与CMYK之间的转换、RGB与HSV之间的转换,以及跨平台色彩管理。
3.2.1 RGB到CMYK的转换
将RGB转换为CMYK通常用于图像的印刷过程中。公式如下:
C = 1 - R
M = 1 - G
Y = 1 - B
K = min(C,M,Y)
需要注意的是,这只是近似的转换公式,实际的印刷色彩管理还会考虑油墨的特性和其他因素。
3.2.2 RGB到HSV的转换
RGB到HSV的转换过程如下:
- 将RGB的每个分量从[0, 1]区间转换到[0, 255]区间。
- 找出最大值和最小值。
- 计算色相(H):
if max == min:
H = 0
elif max == R:
H = 60 * (G - B) / (max - min) + 360 if B > G
H = 60 * (G - B) / (max - min) if B <= G
elif max == G:
H = 60 * (B - R) / (max - min) + 120
elif max == B:
H = 60 * (R - G) / (max - min) + 240
- 计算饱和度(S):
S = (max - min) / max if max != 0 else 0
- 计算亮度(V):
V = max
3.2.3 跨平台色彩管理
跨平台色彩管理涉及到确保在不同设备和操作系统上显示颜色的一致性。这一过程通常需要色彩管理系统(CMS)的支持,它会使用国际标准的色彩描述文件和色彩空间转换公式。其中,ICC(国际色彩协会)标准被广泛采用,它允许色彩信息在不同设备间准确转换。
色彩管理的实践
在实际的色彩管理实践中,开发者或设计师需要使用色彩管理软件工具来执行这些转换。Adobe Photoshop是一个广泛使用的图像编辑软件,它内置了强大的色彩管理功能,可以帮助用户在不同的色彩空间之间进行转换。
下面是一个使用Python进行RGB到HSV转换的示例代码:
import numpy as np
def rgb_to_hsv(rgb):
# Normalize the RGB values to be between 0 and 1
r, g, b = [x / 255.0 for x in rgb]
# Get the maximum and minimum RGB components
max_rgb = max(r, g, b)
min_rgb = min(r, g, b)
# Compute the value
v = max_rgb
# Compute the saturation
if v > 0:
s = (max_rgb - min_rgb) / max_rgb
else:
# If v is 0, then r = g = b = 0, s should be 0
s = 0
# Compute the hue
if s > 0:
if max_rgb == r:
h = 60 * (g - b) / (max_rgb - min_rgb)
elif max_rgb == g:
h = 60 * (b - r) / (max_rgb - min_rgb) + 120
else:
h = 60 * (r - g) / (max_rgb - min_rgb) + 240
else:
h = 0
# Ensure the value of hue is between 0 and 360
h = h % 360
return (h, s, v)
# Example usage:
color_rgb = (135, 206, 250) # Sky blue color in RGB
color_hsv = rgb_to_hsv(color_rgb)
print("RGB to HSV conversion result:", color_hsv)
这段代码首先将RGB颜色值标准化为0到1之间,然后计算出HSV值。需要注意的是,RGB到HSV的转换涉及到了多个计算步骤,如最大值和最小值的确定,以及不同颜色分量之间的差异计算等。每一步都需要仔细处理,以确保转换的准确性。
通过这一章节的学习,读者不仅能够理解颜色模型与色彩空间转换的理论基础,还能够掌握实际转换技术,从而在图像处理、Web设计、打印制作等领域中应用这些知识。
4. 光照与阴影原理
光照和阴影是三维图形中产生真实感的关键,它们在视觉传达上起着决定性作用。了解光照与阴影的原理不仅能帮助我们模拟现实世界的光照效果,还能用于提高图形渲染的真实感和艺术表达。
4.1 光照模型解析
光照模型是计算机图形学中用于模拟光线与物体相互作用的数学模型,它描述了光线如何在物体表面发生反射、折射和散射等现象,从而决定了物体的颜色和亮度。
4.1.1 局部光照模型
局部光照模型是最简单的光照模型之一,它假设光线与物体的交互仅发生在物体表面的一个点上,不考虑光线多次反射或折射带来的影响。常见的局部光照模型包括冯氏模型(Phong)、布林-冯氏模型(Blinn-Phong)。
以冯氏模型为例,它使用以下公式计算表面点的光照:
graph TD
A[光照模型] --> B[环境光照]
A --> C[漫反射光照]
A --> D[镜面反射光照]
代码块展示冯氏模型的计算方式:
# Python 代码实现冯氏光照模型
def phong_lighting(normal, view, light, ka, kd, ks, shininess):
"""
normal: 表面法线
view: 观察方向
light: 光源方向
ka: 环境反射系数
kd: 漫反射系数
ks: 镜面反射系数
shininess: 反光度指数
"""
ambient = ka
diffuse = kd * max(dot(normal, light), 0)
specular = ks * pow(max(dot(normalize(reflect(-light, normal)), view), 0), shininess)
return ambient + diffuse + specular
# 参数说明
# ka, kd, ks: 分别对应环境、漫反射和镜面反射的系数
# normal: 单位表面法线向量
# light: 单位光源方向向量
# view: 单位观察方向向量
# shininess: 反光度,决定高光的明亮程度和范围
局部光照模型在实时图形渲染中应用广泛,尤其是在实时性要求较高的场合,如视频游戏和虚拟现实。
4.1.2 全局光照模型
全局光照模型试图模拟光线在场景中的所有可能交互,包括反射、折射、散射,甚至是光线在不同表面间的多次弹射,从而产生更加真实的渲染效果。
全局光照可以分为两类:直接光照和间接光照。
- 直接光照指的是光源直接照射到物体表面的光。
- 间接光照是指光线从一个物体表面反射或折射到另一个物体表面的光。
全局光照的计算非常复杂,常用的方法包括路径追踪(Path Tracing)、辐射度(Radiosity)等。
4.1.3 光照衰减与色温
光照衰减描述了光源随着距离增加而逐渐变暗的现象,一般表现为与距离的平方成反比,用以模拟现实世界中光源的能量衰减。
色温是衡量光源颜色特性的一个指标,它描述了光源的温度与发出光线颜色之间的关系,通常用开尔文(K)为单位。
在渲染中,需要根据光源的色温和光照衰减特性调整渲染场景,以符合实际物理规律。
4.2 阴影生成技术
阴影为场景带来了深度和体积感,是增强场景真实感的重要视觉元素。阴影的生成需要考虑光源位置、物体形状以及观察视角等多方面因素。
4.2.1 阴影贴图技术
阴影贴图(Shadow Maps)是生成阴影的一种常用技术,它通过渲染场景从光源视角的深度信息来判断哪些区域是被遮挡的,从而生成阴影。
阴影贴图的生成过程大体分为两个步骤:
- 创建阴影贴图:从光源视角渲染场景深度信息到一张纹理中。
- 采样阴影贴图:在原始渲染过程中,根据像素在深度贴图中的深度信息来判断当前像素是否处于阴影中。
阴影贴图技术由于其实现简单且计算效率高,被广泛应用于实时渲染场合。
4.2.2 阴影体技术
阴影体(Shadow Volumes)技术是另一种生成阴影的方法,它通过构造阴影区域的几何体——阴影体来判断阴影。
阴影体技术的原理是:
- 对于场景中的每一个光源,构建从光源出发包围物体的体积,即阴影体。
- 然后利用深度测试来判断像素是否在阴影体内部,从而确定是否被遮挡。
阴影体技术在渲染质量上通常优于阴影贴图,但计算成本较高,适用于对阴影质量要求较高的应用,如电影制作。
4.2.3 阴影深度缓存技术
阴影深度缓存(Shadow Depth Maps)技术与阴影贴图非常相似,但深度信息是存储在屏幕空间深度贴图中,而非光源视角空间。
这种技术的好处在于:
- 可以利用GPU的深度测试硬件加速。
- 容易实现软阴影效果。
在实际应用中,开发者通常根据性能需求和渲染质量要求选择合适的阴影生成技术。
光照与阴影的原理和应用是计算机图形学中的高级话题,通过这些技术的应用,艺术家和开发者能够在虚拟世界中创建出令人信服的光照效果。在本章节中,我们深入探讨了局部和全局光照模型的原理,以及多种阴影生成技术,旨在帮助读者构建出更加真实的三维图形世界。
5. 图形渲染算法与技术
图形渲染是计算机图形学的核心领域之一,它负责将三维场景转化为二维图像。本章将深入解析不同的图形渲染算法和技术,包括光线追踪和光栅化,并讨论它们在现代图形处理中的应用和优化策略。
5.1 光线追踪技术
光线追踪是一种通过模拟光线传播和相互作用来生成图像的技术。它能够产生极其逼真的渲染效果,尤其是在处理光线、阴影、反射和折射等效果时。
5.1.1 光线追踪原理
光线追踪通过模拟光线与物体间的交互来计算像素颜色。基本过程包括发射光线、光线与场景的交互以及最终的颜色计算。
// Pseudo-code for a basic ray tracing algorithm
for each pixel {
ray = generateRayForPixel(pixel)
color = traceRay(ray)
writeColor(pixel, color)
}
光线追踪算法通常包含以下几个步骤:
- 场景设置 :定义了渲染中包含的所有物体、光源以及相机。
- 光线发射 :从视点发射光线,穿过每个像素点。
- 光线相交 :检测光线与场景中对象的交点。
- 着色计算 :确定交点处的颜色,这包括漫反射、高光、阴影、反射和折射等计算。
- 递归 :对于反射和折射效果,可能需要发射新的光线,并递归计算这些光线的颜色。
5.1.2 光线追踪优化技术
尽管光线追踪可以生成高质量图像,但它对计算资源的需求很大,尤其是在处理复杂场景时。优化技术对于提高效率至关重要。
// Pseudo-code for a basic ray tracing optimization, using bounding volume hierarchy (BVH)
if (isRayIntersectingBVH(ray, rootNode)) {
node = findClosestIntersection(ray, rootNode)
color = calculateShadingAtIntersection(node.intersection)
return color
}
return backgroundColor
优化技术包括:
- 空间划分 :例如使用八叉树(Octrees)、边界体积层次(BVH)等,可以快速剔除不会与光线相交的对象。
- 光线束跟踪 :同时追踪一组光线(束)而不是单个光线,这可以利用向量操作优化。
- 时间复用 :例如将计算出的颜色缓存起来,避免重复计算。
- 硬件加速 :利用现代GPU的并行处理能力,可以显著加速光线追踪过程。
5.1.3 光线追踪与现实主义渲染
光线追踪技术的优势在于其能够产生高度逼真的渲染效果,特别是对于复杂的效果如全局照明、软阴影、景深、运动模糊等。
5.2 光栅化技术
光栅化是另一种主要的图形渲染技术,它将三维场景中的几何体转换成二维屏幕上的像素。这一过程通常包括顶点处理、裁剪、光栅化和像素处理等步骤。
5.2.1 光栅化流程解析
光栅化的核心步骤如下:
- 顶点处理 :将三维顶点坐标变换到屏幕空间。
- 裁剪 :去掉屏幕外的部分,只处理视锥体内的几何体。
- 光栅化 :将裁剪后的几何图形转换为像素集合。
- 像素处理 :包括纹理映射、光照计算等,最终确定像素颜色。
// Pseudo-code for a basic vertex processing stage in rasterization
for each vertex {
vertex.position_screen = transformVertex(vertex.position_model)
// Further processing such as texture coordinate transformation
}
5.2.2 着色器编程技术
现代图形API(如OpenGL和DirectX)提供了可编程的着色器,这允许开发者实现各种视觉效果。
// GLSL code for a simple vertex shader
layout (location = 0) in vec3 aPos;
void main() {
gl_Position = vec4(aPos, 1.0);
}
5.2.3 光栅化与性能考量
光栅化在性能上通常优于光线追踪,尤其是在实时渲染中。为了保持高效性能,开发者必须考虑如下因素:
- 优化顶点数据 :使用索引、合并几何体等方式减少顶点数量。
- 避免过度使用像素处理 :尽量减少着色器中的复杂计算。
- 纹理和着色器缓存 :重用纹理数据和着色器结果可以显著提高性能。
- 使用GPU特定优化 :例如使用多级渐进纹理(MIP maps)、法线贴图等技术。
本章介绍了图形渲染领域的核心算法和技术,包括光线追踪和光栅化。这两种方法各有优缺点,在实际应用中,开发者会根据具体需求选择合适的渲染技术。在下一章中,我们将进一步探讨纹理映射与GPU编程的基础知识。
6. 纹理映射与GPU编程基础
纹理映射和GPU编程是现代图形学领域中至关重要的技术。它们在提高渲染质量、增强视觉效果以及提升渲染性能方面起到了关键作用。本章将对纹理映射技术进行深入探讨,并引入GPU编程的基础知识和实践技巧。
6.1 纹理映射技术
纹理映射是通过将二维图像映射到三维模型的表面,以增强模型的视觉复杂度和真实感。这项技术广泛应用于游戏开发、模拟训练以及数字内容创建中。
6.1.1 纹理映射的基本概念
纹理映射的核心是“贴图”,它将一个纹理(Texture)贴到模型的表面。纹理可以是颜色图(Color Map)、法线贴图(Normal Map)或位移贴图(Displacement Map)等,用于表现不同层级的细节。
纹理坐标的概念是纹理映射中的基础,它定义了如何将二维纹理映射到三维模型上的每个顶点。UV坐标是纹理坐标的常见表示方式,其中U和V代表纹理空间的水平和垂直轴。
6.1.2 纹理过滤和MIP映射技术
当纹理被映射到几何体上时,可能会出现纹理失真现象,这主要是因为纹理样本与屏幕像素之间并非一一对应。为了解决这个问题,纹理过滤技术应运而生。
- 双线性纹理过滤(Bilinear Filtering) :通过使用周围四个纹理样本的加权平均值来计算最终颜色。
- 三线性纹理过滤(Trilinear Filtering) :在MIP映射的基础上,结合两个最接近的MIP级别进行双线性过滤。
- 各向异性过滤(Anisotropic Filtering) :用于处理斜视角下的纹理模糊问题,它考虑了屏幕像素与纹理空间之间的角度。
MIP映射技术 是一种纹理技术,可以预先生成不同分辨率的纹理(即MIP级别),并在渲染时根据物体与视点的距离自动选择最合适的纹理级别。
6.1.3 纹理压缩与管理
纹理文件可能会非常占用内存,因此纹理压缩成为了优化内存使用的关键。常见的纹理压缩格式包括S3TC(DXTn)、PVRTC、ETC等。
纹理管理包括内存管理和资源管理。内存管理主要是优化内存分配和释放,防止内存碎片化。资源管理则关注于加载、卸载和更新纹理资源的策略,以确保GPU高效使用纹理资源。
6.2 GPU编程入门
GPU(图形处理单元)专为并行计算而设计,它在图形渲染领域拥有无与伦比的性能优势。学习GPU编程,可以帮助开发者充分利用硬件资源,提升应用程序的性能。
6.2.1 GPU的并行计算模型
GPU的并行计算模型基于大量的并行处理单元(GPU核心)。例如,NVIDIA的CUDA架构中,每个SM(Streaming Multiprocessor)包含多个核心,可以同时处理成百上千的线程。这种架构使得GPU在处理大量重复计算任务时表现出色。
6.2.2 CUDA与OpenGL编程基础
CUDA(Compute Unified Device Architecture)是NVIDIA的并行计算平台和编程模型,它允许开发者使用C、C++等语言直接编程GPU。CUDA提供了简洁的内存管理、线程调度和设备管理机制,使得GPU编程更加直接和高效。
OpenGL(Open Graphics Library)是一个跨语言、跨平台的API,广泛用于渲染2D和3D矢量图形。与CUDA不同,OpenGL更侧重于图形渲染,但现代OpenGL版本(如OpenGL 3.x及以上)也支持通过着色器(Shaders)编程GPU进行渲染。
6.2.3 实现简单的GPU加速效果
GPU加速效果可以通过多种方式实现,例如使用CUDA进行图像处理,或使用OpenGL着色器增强渲染效果。
以CUDA为例,下面是一个使用CUDA加速图像模糊(一个典型的并行处理任务)的简单示例代码:
// CUDA kernel for box filter blur
__global__ void boxFilter(float *input, float *output, int width, int height) {
int x = blockIdx.x * blockDim.x + threadIdx.x;
int y = blockIdx.y * blockDim.y + threadIdx.y;
if (x < width && y < height) {
float sum = 0;
int n = 0;
// Perform box filtering over the image
for (int i = -1; i <= 1; i++) {
for (int j = -1; j <= 1; j++) {
int col = min(max(0, x + i), width - 1);
int row = min(max(0, y + j), height - 1);
sum += input[row * width + col];
n++;
}
}
output[y * width + x] = sum / n;
}
}
在这个例子中,每个线程负责图像中的一个像素,并对其进行简单的box滤波操作。通过CUDA,这个过程可以在GPU上高度并行地执行,从而大大加速图像处理速度。
通过上述的章节内容,读者应能够理解纹理映射的基本概念,以及如何使用GPU编程来实现各种并行计算任务。这些知识为继续探索高级图形学技术和实践提供了坚实的基础。
简介:计算机图形学是信息科技的一个关键分支,本笔记分享将涵盖基础概念到高级技术,包括二维和三维图形处理、颜色模型、光照原理、图形渲染技术、纹理映射、GPU编程、几何建模、动画和运动学,以及图形API等。这些内容对于游戏开发和相关领域至关重要,目的是让学习者全面深入理解计算机图形学,并为实际项目开发奠定基础。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 16
16 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)