CVPR 2025 | MUST:首个多光谱无人机单目标跟踪数据集和统一框架
非对称注意力机制:与标准Transformer不同,UNTrack只保留与目标定位密切相关的注意力路径,例如模板与搜索帧之间的交互,历史提示与搜索帧之间的交互等;构建了统一融合光谱、空间和时间特征的跟踪框架(UNTrack),综合利用历史光谱提示、初始模板和连续帧信息,提高在复杂场景中的鲁棒性。提出了首个面向无人机多光谱单目标跟踪的大规模数据集(MUST),包含250个视频序列,涵盖12类真实挑战
点击下方卡片,关注“CVer”公众号
AI/CV重磅干货,第一时间送达
添加微信号:CVer2233,小助手会拉你进群!
扫描下方二维码,加入CVer学术星球!可以获得最新顶会/顶刊上的论文idea和CV从入门到精通资料,及最前沿应用!发论文/搞科研/涨薪,强烈推荐!


转载自:遥感与深度学习
论文介绍
题目:MUST: The First Dataset and Unified Framework for Multispectral UAV Single Object Tracking
期刊:IEEE/CVF Computer Vision and Pattern Recognition Conference
论文:https://arxiv.org/abs/2503.17699
数据:https://github.com/q2479036243/MUST-Multispectral-UAV-Single-Object-Tracking
年份:2025
单位:北京理工大学
创新点
-
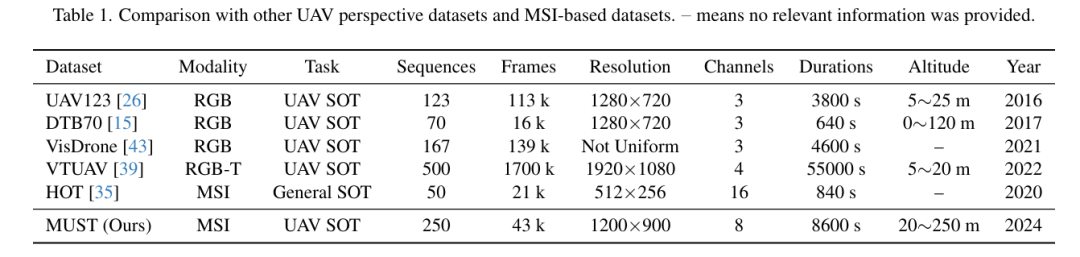
提出了首个面向无人机多光谱单目标跟踪的大规模数据集(MUST),包含250个视频序列,涵盖12类真实挑战情境,填补了该领域的空白。
-
构建了统一融合光谱、空间和时间特征的跟踪框架(UNTrack),综合利用历史光谱提示、初始模板和连续帧信息,提高在复杂场景中的鲁棒性。
-
引入非对称注意力机制和光谱背景抑制模块,有效降低计算量,提升了目标定位的精度和效率。
-
设计了光谱提示编码器并结合参数迁移策略,使RGB预训练模型能有效适用于多光谱任务,大幅提升模型性能。
数据
MUST 数据集
-
基本信息
包含 250 个多光谱视频序列,共 42671 帧,分辨率为 1200×900,帧率 5 fps。 -
光谱特征
每帧图像具有 8 个波段,覆盖 390–950 nm,涵盖可见光与近红外,增强目标与背景的光谱可分性。 -
挑战属性
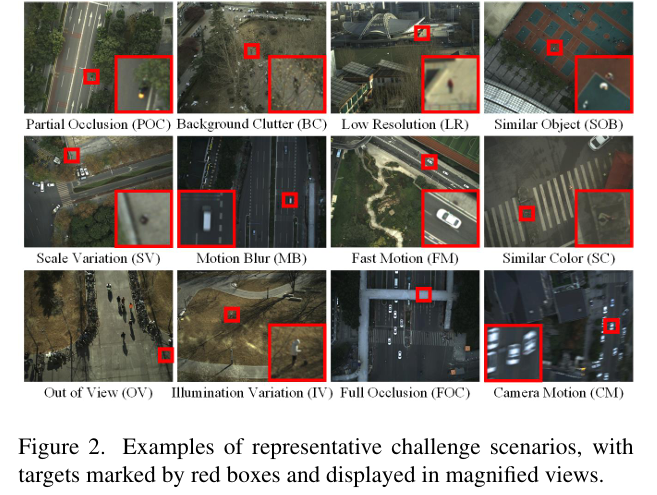
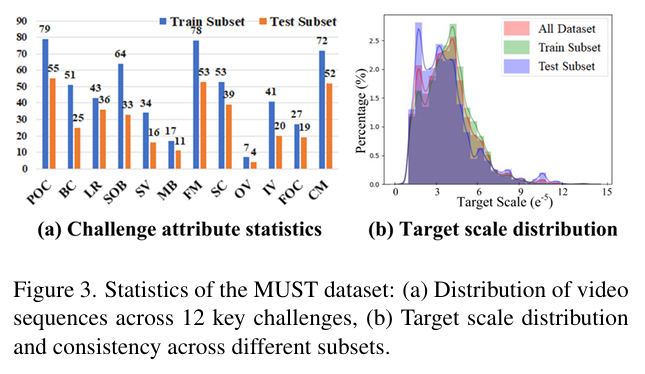
每个序列标注了 12 类跟踪挑战,如遮挡、快速运动、相似颜色、背景杂乱、出视野等,全面模拟真实无人机跟踪环境。 -
采集与标注
数据由无人机搭载多光谱相机采集,飞行高度 20–250 米。所有图像经几何与辐射校正,并由人工精确标注目标框和遮挡状态。
方法
本文提出了一种名为 UNTrack 的多光谱无人机目标跟踪框架。该方法通过统一建模光谱、空间和时间特征,提升在复杂场景下的跟踪鲁棒性与效率。整体结构包括三个主要模块:统一非对称Transformer、光谱提示编码器,以及预测头。
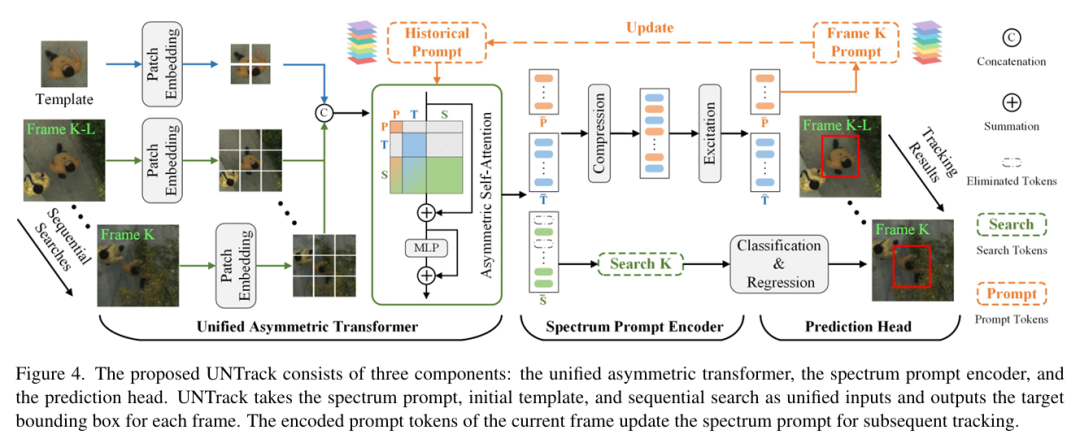
1. 统一非对称Transformer
该模块的目标是从多个维度提取目标的判别特征,具体包括:
-
输入信息:将历史帧的光谱提示、初始模板图像和连续搜索帧作为统一输入,构建一个融合的特征序列。
-
非对称注意力机制:与标准Transformer不同,UNTrack只保留与目标定位密切相关的注意力路径,例如模板与搜索帧之间的交互,历史提示与搜索帧之间的交互等;而剪除掉冗余或干扰性的部分(如模板与提示之间的相互作用),以降低计算开销并减少噪声干扰。
-
搜索序列输入:不同于只用当前帧进行搜索,UNTrack引入连续帧作为序列输入,从而更好地建模目标在时间上的连续性和运动轨迹。
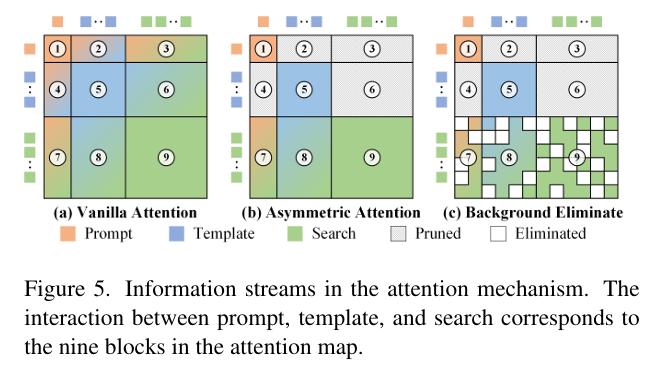
2. 光谱背景消除机制
为减少背景干扰和计算成本,UNTrack在Transformer中嵌入了一个背景消除模块,流程如下:
-
基于注意力结果判断图像中各区域与目标的相关性。
-
只保留与目标高度相关的区域作为候选,其余区域视为背景并剔除。
-
候选区域比例会在训练中动态调整,以适应不同场景下的目标显著性。
该机制利用多光谱信息增强了目标与背景的光谱差异感知,能够有效过滤外部干扰。
3. 光谱提示编码器
该模块用于生成并更新代表目标材料特征的光谱提示,具体做法如下:
-
首先,将历史光谱提示与当前模板信息进行特征融合,提取目标的稳定光谱特征。
-
使用 compression-excitation机制(通过轻量卷积和多层感知机)聚焦关键光谱通道,抑制冗余信息。
-
最终输出一个紧凑的光谱向量,用作下一个时间点的跟踪输入,从而增强跨帧一致性。
该设计确保了模型能持续感知目标的“材料本质”,即使目标在颜色或外形上发生变化,也能维持准确跟踪。
4. 预测头与损失设计
UNTrack采用双分支预测头来同时进行目标定位与分类:
-
一条分支用于输出目标位置的边界框。
-
另一条分支用于输出每个候选区域是否为目标的置信度。
训练阶段使用了常见的分类损失与边界框回归损失,保证定位精度和分类准确性。
结果与分析
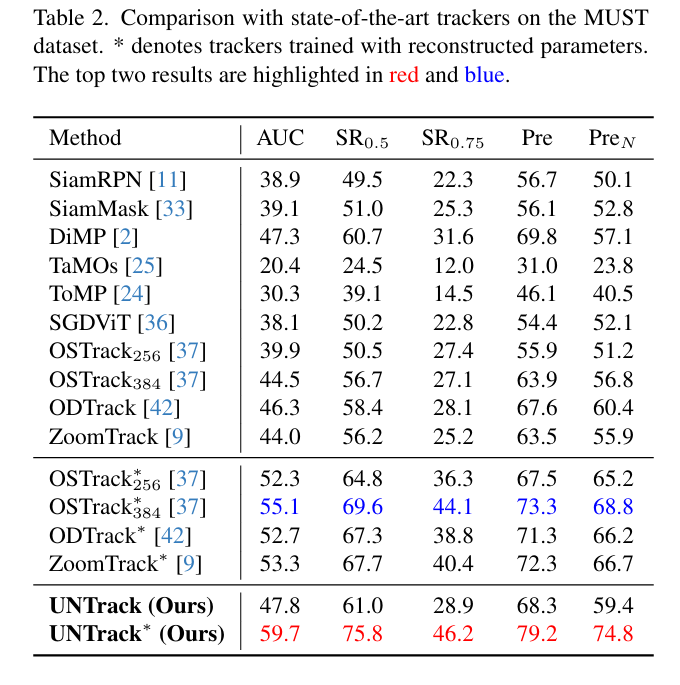
本文方法在多光谱无人机跟踪数据集上全面优于现有主流方法,表现出更强的鲁棒性和适应性。同时在多光谱和RGB通用数据集上也展现出良好的迁移能力,证明了其结构的通用性与效率。
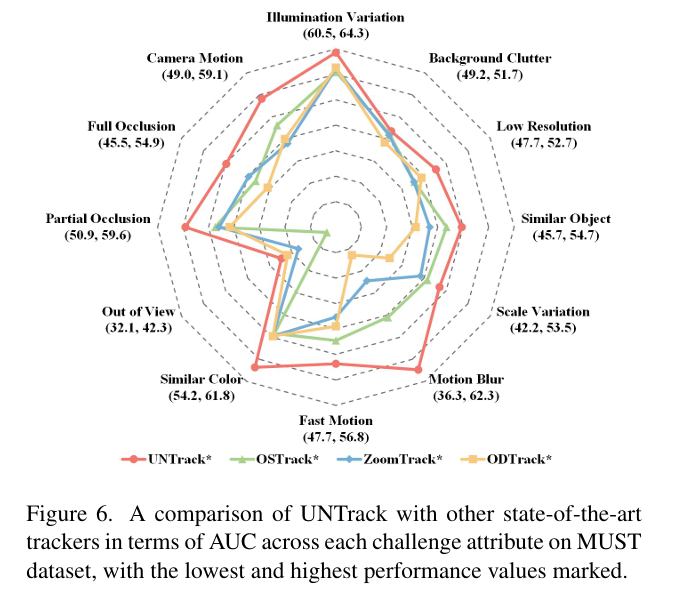
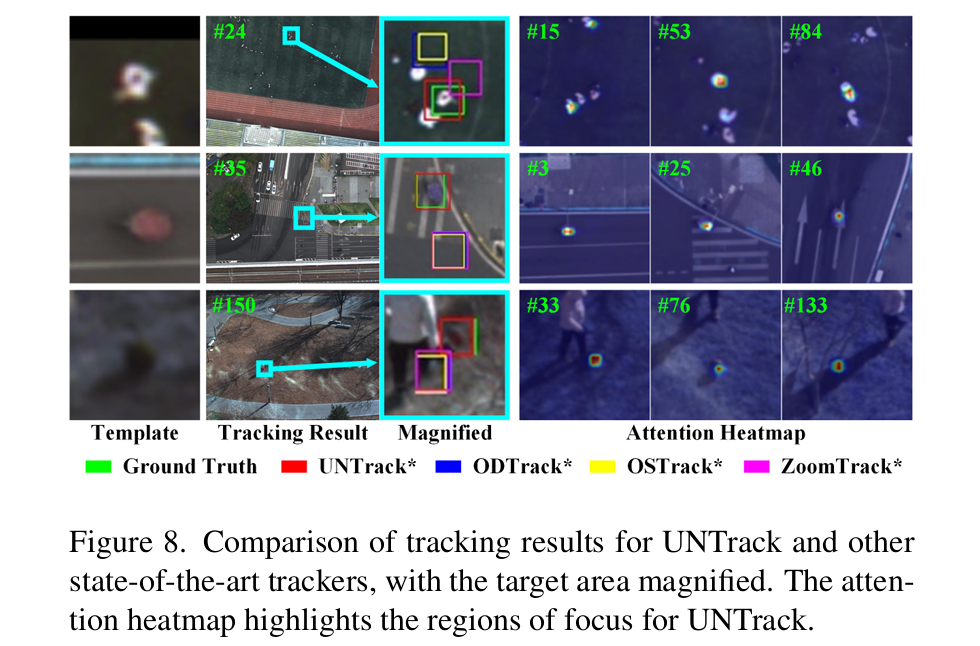
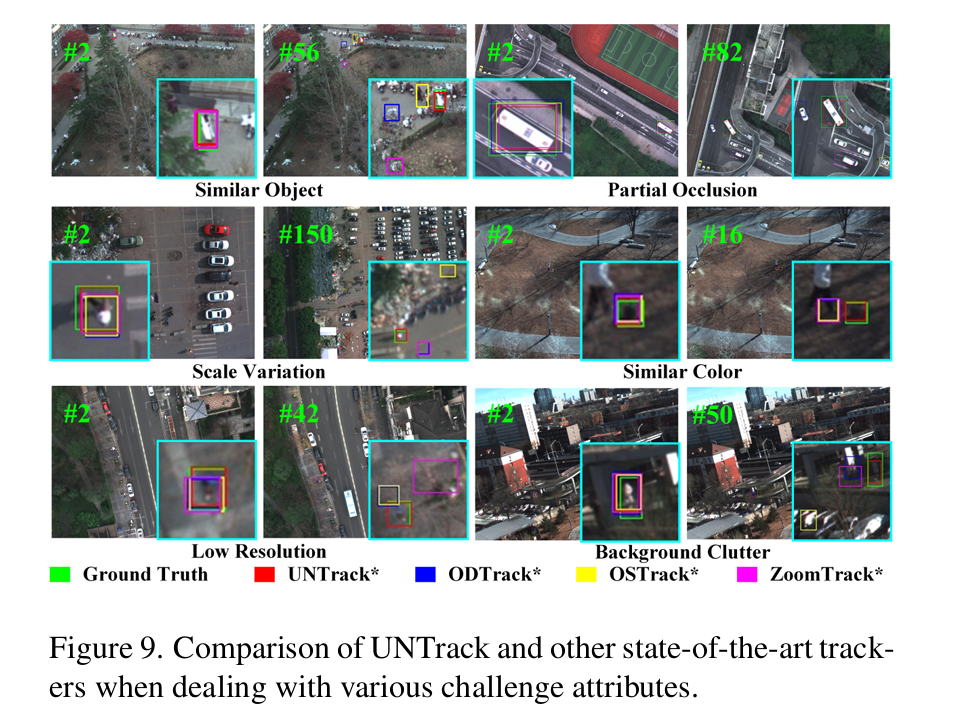
更多图表分析可见原文。
何恺明在MIT授课的课件PPT下载
在CVer公众号后台回复:何恺明,即可下载本课程的所有566页课件PPT!赶紧学起来!
CVPR 2025 论文和代码下载
在CVer公众号后台回复:CVPR2025,即可下载CVPR 2025论文和代码开源的论文合集ECCV 2024 论文和代码下载
在CVer公众号后台回复:ECCV2024,即可下载ECCV 2024论文和代码开源的论文合集
CV垂直方向和论文投稿交流群成立
扫描下方二维码,或者添加微信号:CVer2233,即可添加CVer小助手微信,便可申请加入CVer-垂直方向和论文投稿微信交流群。另外其他垂直方向已涵盖:目标检测、图像分割、目标跟踪、人脸检测&识别、OCR、姿态估计、超分辨率、SLAM、医疗影像、Re-ID、GAN、NAS、深度估计、自动驾驶、强化学习、车道线检测、模型剪枝&压缩、去噪、去雾、去雨、风格迁移、遥感图像、行为识别、视频理解、图像融合、图像检索、论文投稿&交流、PyTorch、TensorFlow和Transformer、NeRF、3DGS、Mamba等。 一定要备注:研究方向+地点+学校/公司+昵称(如Mamba、多模态学习或者论文投稿+上海+上交+卡卡),根据格式备注,可更快被通过且邀请进群
▲扫码或加微信号: CVer2233,进交流群
CVer计算机视觉(知识星球)人数破万!如果你想要了解最新最快最好的CV/DL/AI论文、实战项目、行业前沿、从入门到精通学习教程等资料,一定要扫描下方二维码,加入CVer知识星球!最强助力你的科研和工作!
▲扫码加入星球学习
▲扫码或加微信号: CVer2233,进交流群
CVer计算机视觉(知识星球)人数破万!如果你想要了解最新最快最好的CV/DL/AI论文、实战项目、行业前沿、从入门到精通学习教程等资料,一定要扫描下方二维码,加入CVer知识星球!最强助力你的科研和工作!
▲扫码加入星球学习▲点击上方卡片,关注CVer公众号 整理不易,请点赞和在看

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 0
0 0
0- 0



 已为社区贡献113条内容
已为社区贡献113条内容

所有评论(0)