Sentinel-1 SLC数据预处理(SNAP软件)
前言:关于SNAP的文章写得很多也比较全,但是对于为什么要对影像做这一步的预处理的解说相对较少,这篇文章主要是补充一些在SNAP软件中进行预处理的每一步的目的,以及解决如何在SNAP软件中对原始数据进行参数查看的问题。
继上篇从ASF下载Sentinel-1 SLC数据,接下来对该文件(.zip格式)直接进行预处理,全过程联网操作,有些步骤涉及外部DEM数据需要下载。
关于SNAP的安装详见:SNAP软件的下载、安装、更新、卸载与遇到的一些问题
目录
1、数据导入
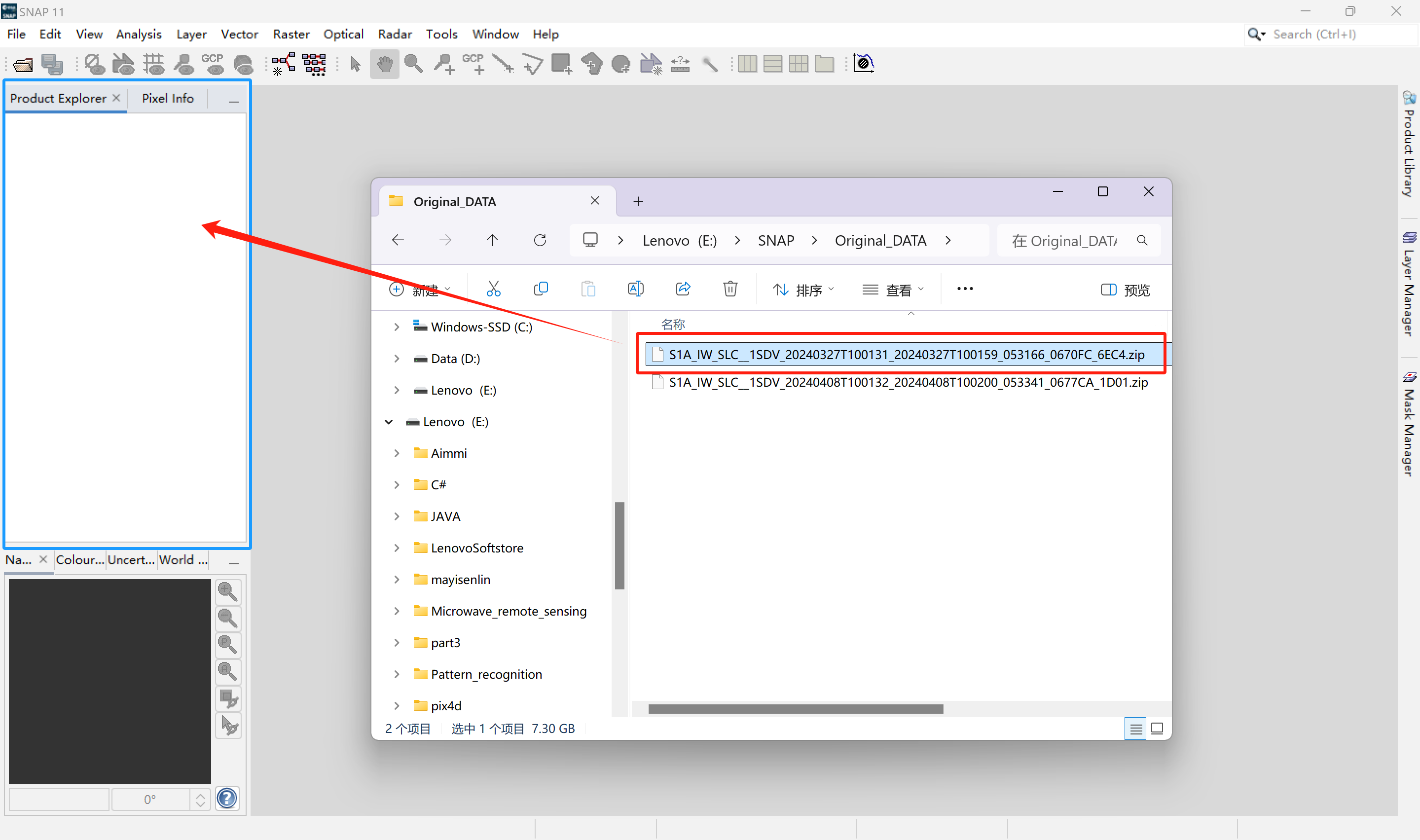
从ASF Data Search下载数据之后,直接打开下载的文件夹,文件的格式是.zip,无需解压。

打开SNAP软件,直接将从ASF下载的文件(.zip)按住鼠标左键拖拽至软件【Product Explorer】中,也就是蓝色图示区域,等待影像加载。
① 数据信息查看
【Metadata】->【Abstracted_Metadata】,双击【Abstracted_Metadata】可以查看详细信息,如下图所示。
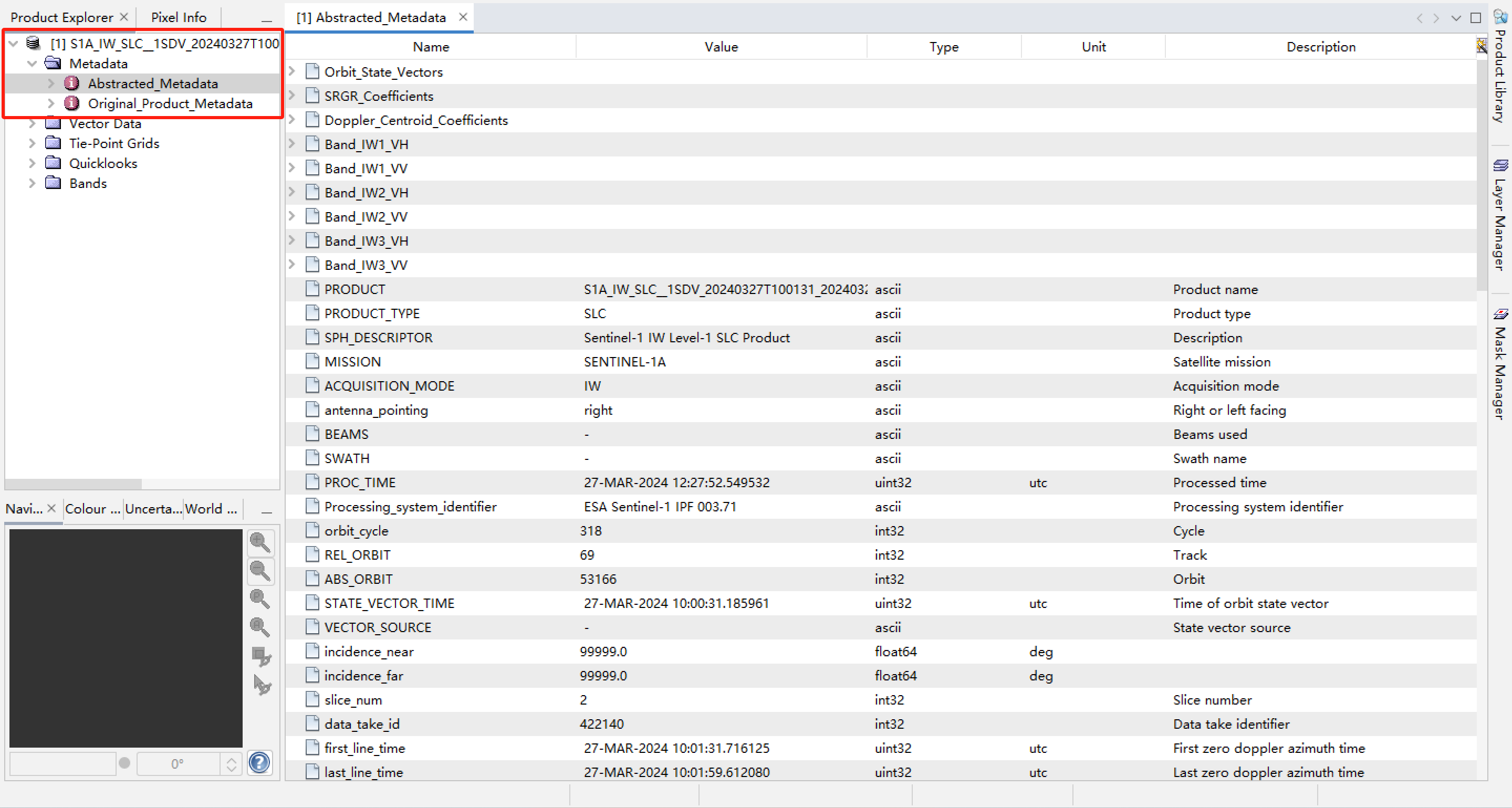
在【Abstracted_Metadata】中,可以看到影像一些信息,这里列举出一些比较重要的信息。在这个表格中,我们可以明确整张影像范围(经纬度)、分辨率、极化方式以及获取的时间等。
|
属性 |
字段标识 |
值 |
|
范围 |
first_near_lat,first_near_long |
23.091159,120.114487 |
|
first_far_lat, first_far_long |
23.624861,122.523438 |
|
|
last_near_lat, last_near_long |
24.775029,119.754092 |
|
|
last_far_lat, last_far_long |
25.141015,122.229448 |
|
|
分辨率 |
range_spacing(距离向分辨率) |
2.3295619999999997 m |
|
azimuth_spacing(方位向分辨率) |
13.972666666666667 m |
|
|
轨道参数 |
PASS |
ASCENDING 升轨 |
|
Antenna_pointing |
right 右视 |
|
|
极化方式 |
mds1_tx_rx_polar |
VH(垂直发射,水平接收) |
|
mds2_tx_rx_polar |
VV(垂直发射,垂直接收) |
|
|
时间信息 |
first_line_time |
27MAR-2024 10:01:31.716125 |
|
last_line_time |
27-MAR-2024 10:01:59.612080 |
此外,我比较关心的是轨道参数,能够对影像的倒置情况(上下、左右倒置)进行初步判断,理论部分在超级禾欠水博主的文章里写得很明白(升降轨左右视判断)。通过学习,这里用到的图像是右侧视升轨,也就是上下倒置。
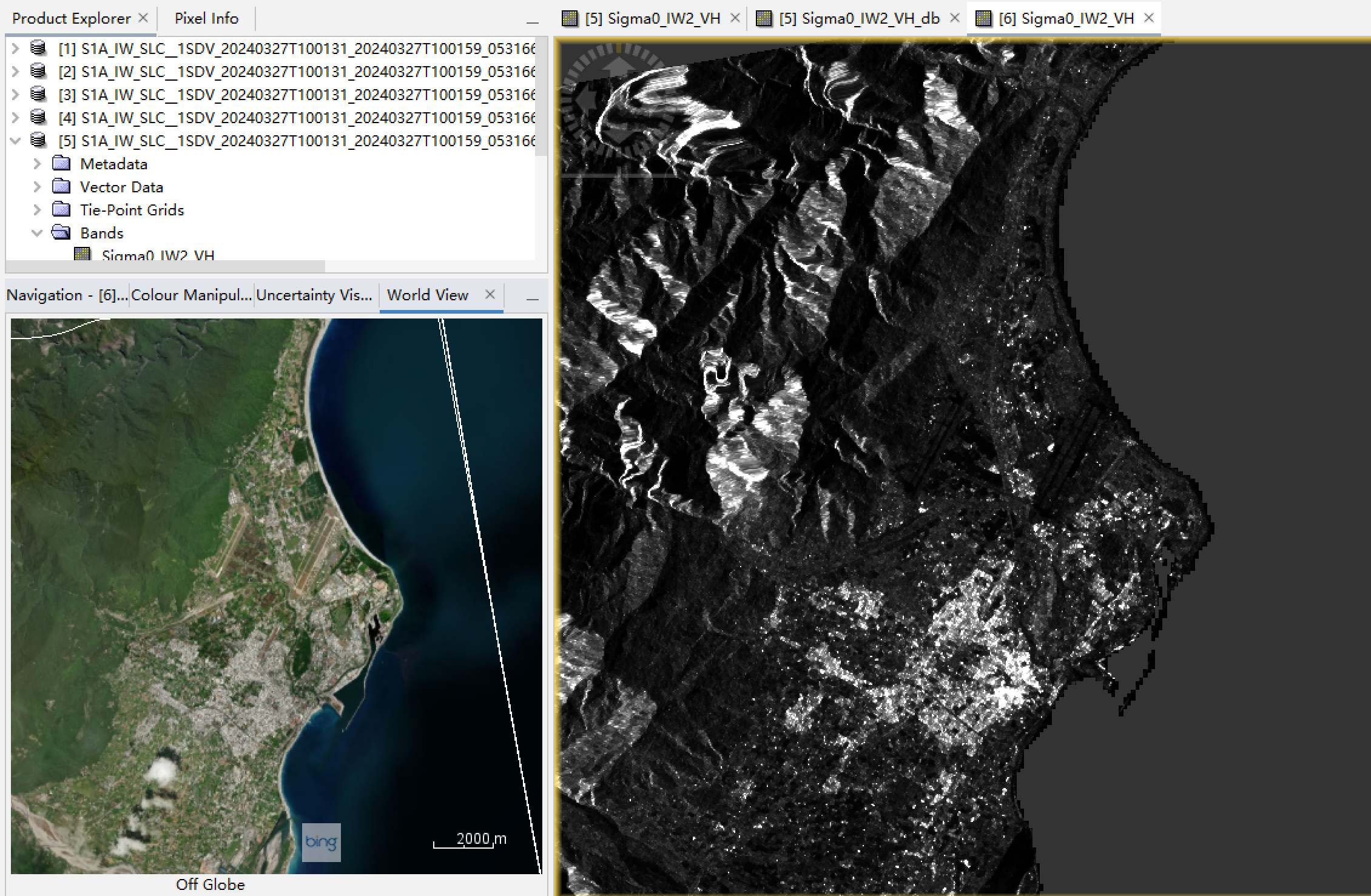
② 影像查看
这里选择【Intensity_IW3_VH】双击进行查看(右侧灰度图),在【Product Explorer】下方有【World View】能够找到图像所在的位置,这里就可以初步看出图像是上下颠倒的了。
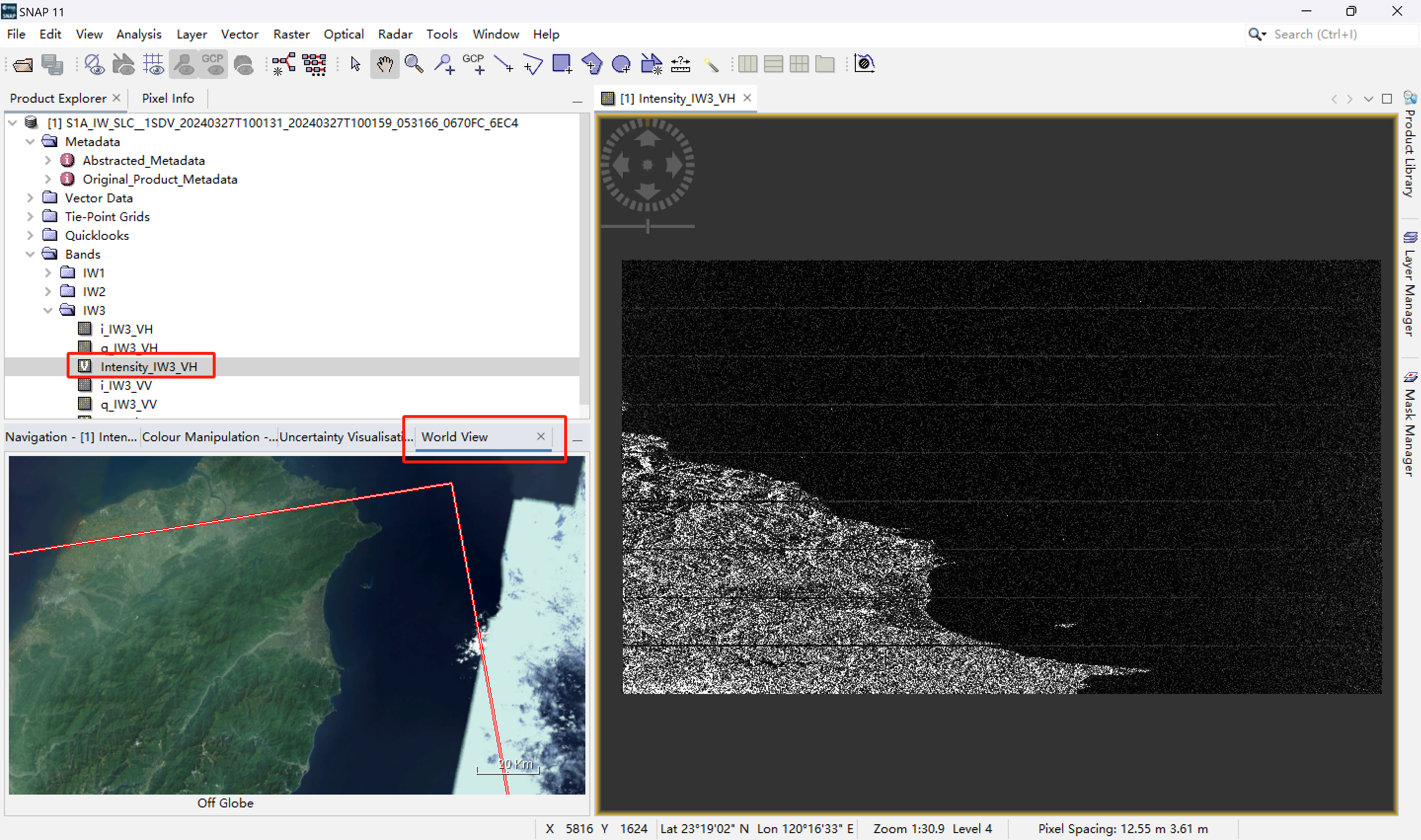
这里的Sentinel-1 IW SLC影像是由IW1/IW2/IW3三个条带组成,每个条带由许多的Bursts组成的。其中,IW1/IW2/IW3是TOPSAR模式实现宽幅、高分辨率、高干涉一致性的设计,Bursts是Sentinel-1在宽幅、高分辨率、低功耗和InSAR可靠性之间权衡的结果。简单的理解就是这样的设计会提高空间分辨率、增大一副影像的范围等。
关于Sentinel-1的简要介绍:从5:13开始能看到Sentinel-1简要的成像方式。
Copernicus Sentinel-1: radar vision for Copernicus
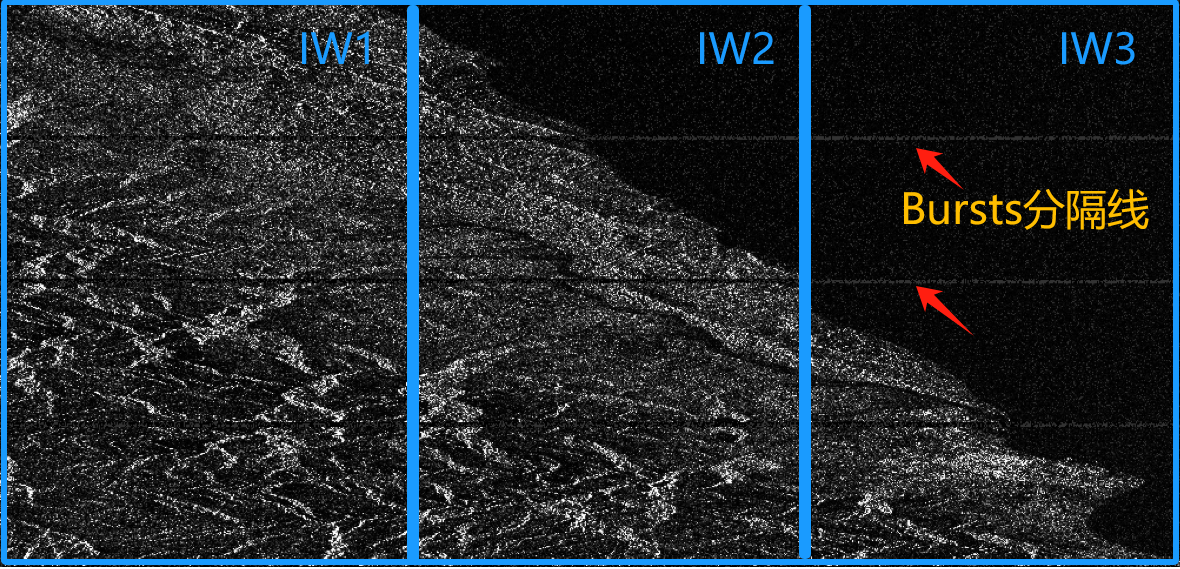
这里演示一下一张Sentinel-1 IW SLC影像大概的分布:
2、子集提取
目的:从完整轨道数据中提取感兴趣区域,提高处理效率,减少后续处理的时间消耗。Sentinel-1的覆盖范围很广,有时候我们只需要影像的一部分或者为了提高计算时间,采用子集提取的方法去选择想要的地方。
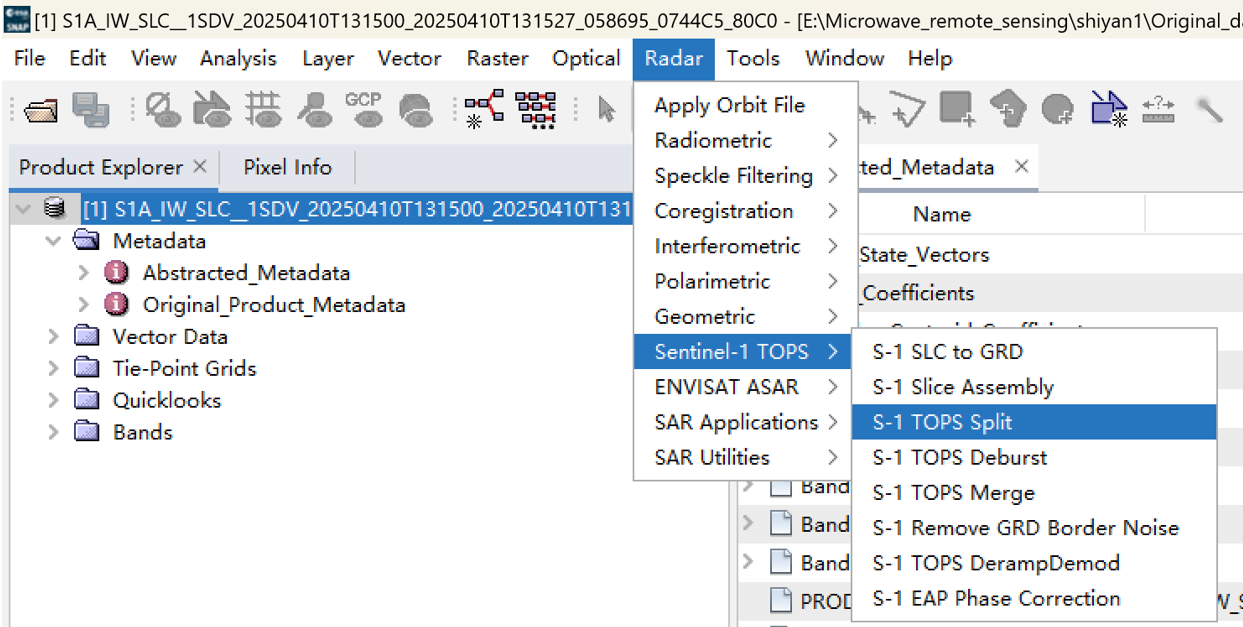
选择工具:【Radar】 -> 【Sentinel-1 TOPS】 -> 【S-1 TOPS Split】。
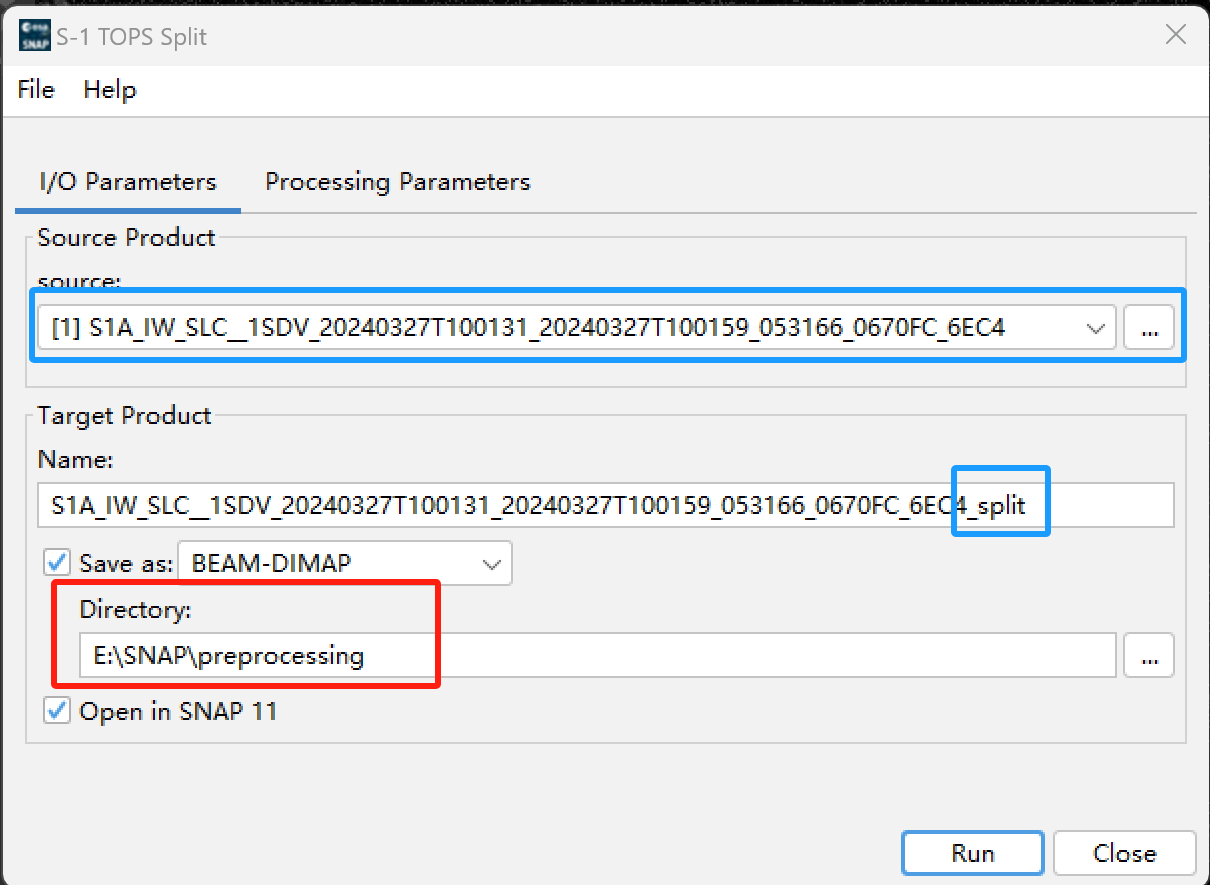
在【I/O Parameters】中,在【Directory】选择输出路径,这里需要看一下输入的文件【source】是否正确,输出的文件会有后缀 “_split”。每一个步骤都会有对应的后缀,若是想检查哪一个步骤漏掉了,可以通过文件后缀查看。
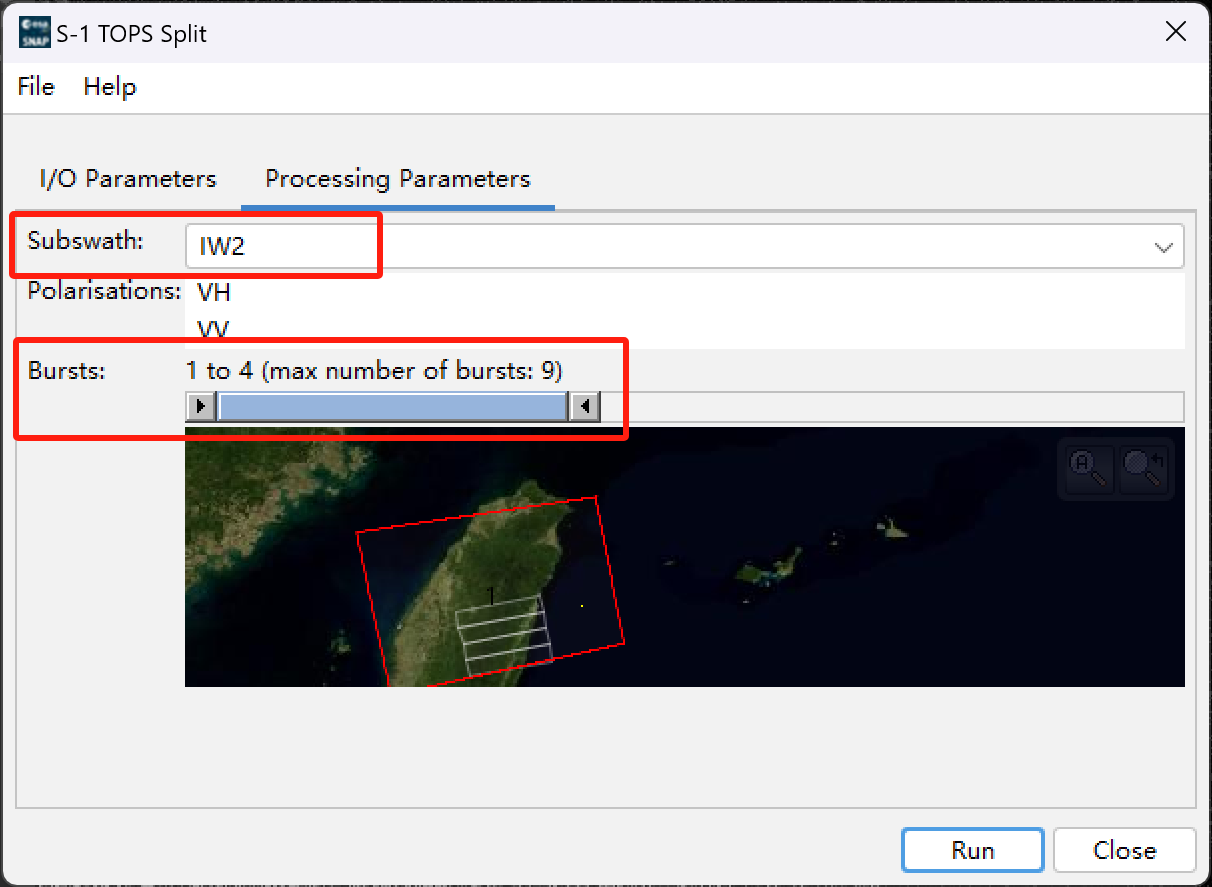
在【Processing Parameters】中,【Subswath】和【Bursts】可以选择、调整感兴趣区域。这里可以根据下方地图进行调整,下图所展示的设置是IW2、Bursts是1-4,点击【Run】运行。
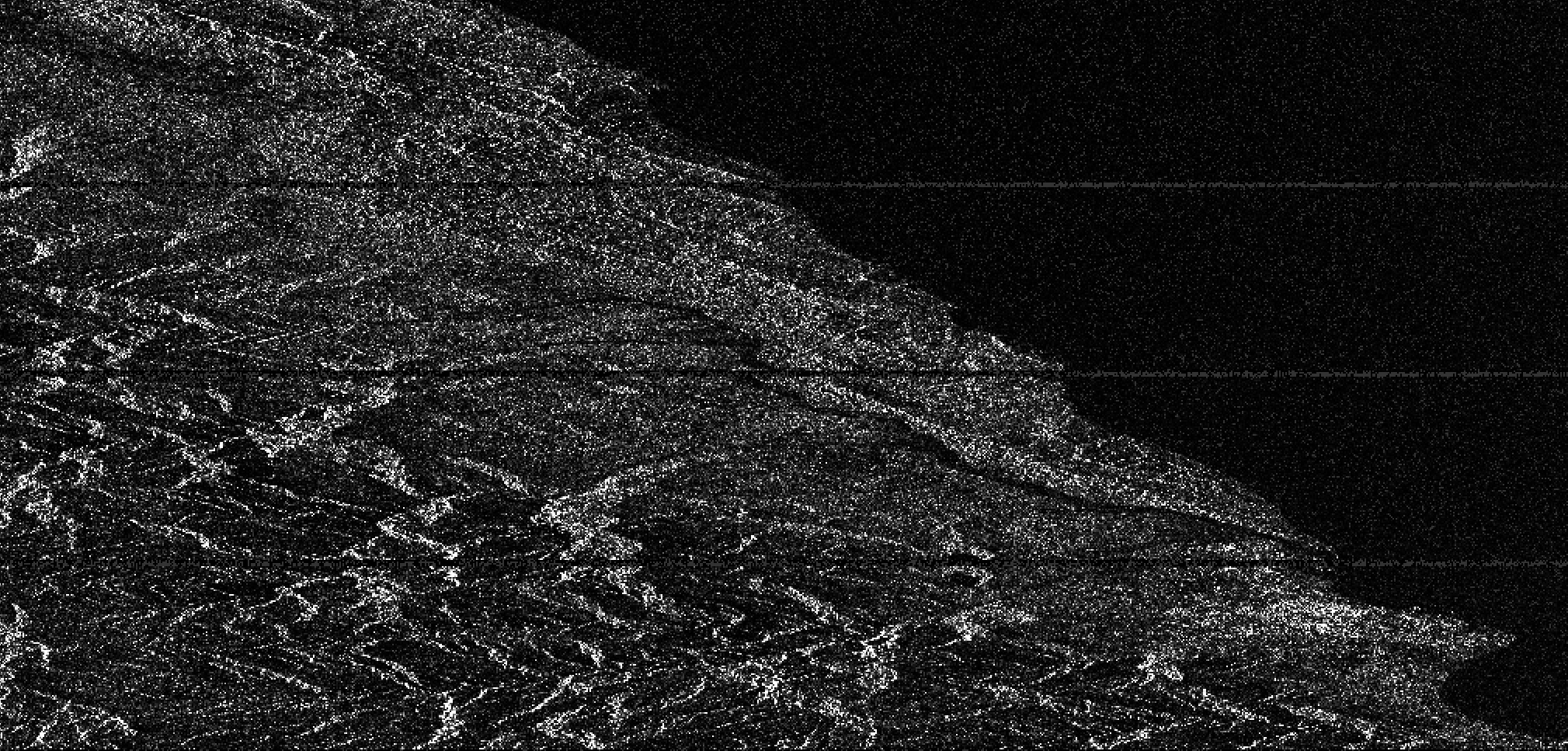
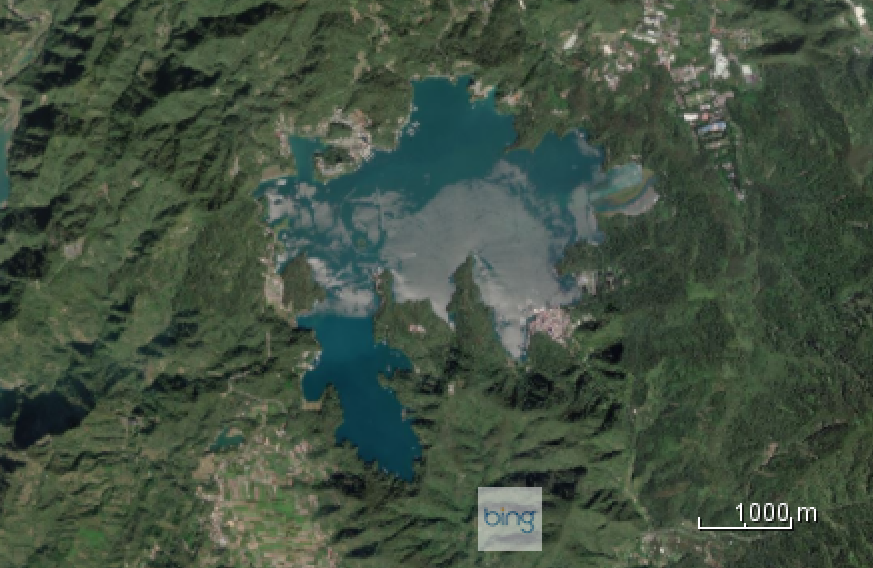
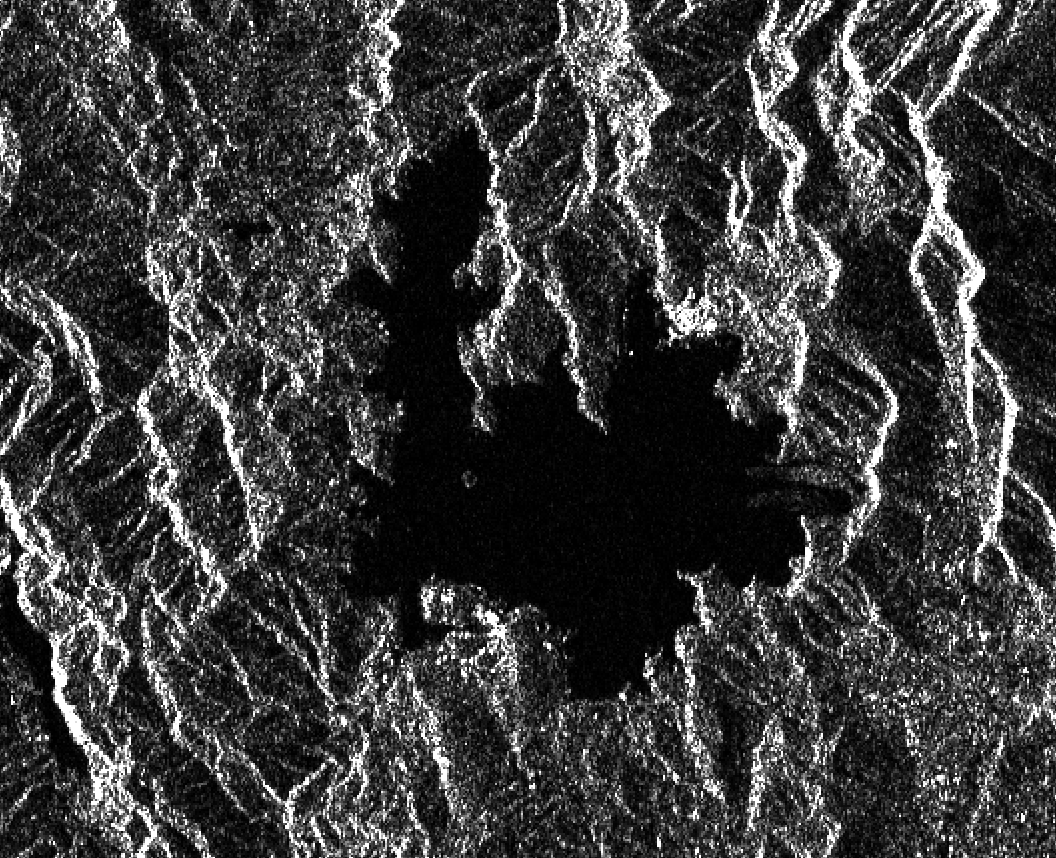
输出的结果:明显看出图像有4条被切开的线,每一个部分为一个Burst,初步判断该部分左下角为山脉、右上角暗黑色为河流,中间像砂砾感的是平地或者是建筑物。
3、精密轨道
目的:利用精轨数据校正成像几何,提升几何精度。将元数据.xml的描述轨道的参数值(例如星历数据等)用更精确的轨道文件(精确的轨道文件通常需要影像产生两周后才能计算得到,可以在Sentinel-1质量控制报告网址下载,但是SNAP中是直接从欧空局Sentinel-1轨道文件服务器下载的)替换掉。
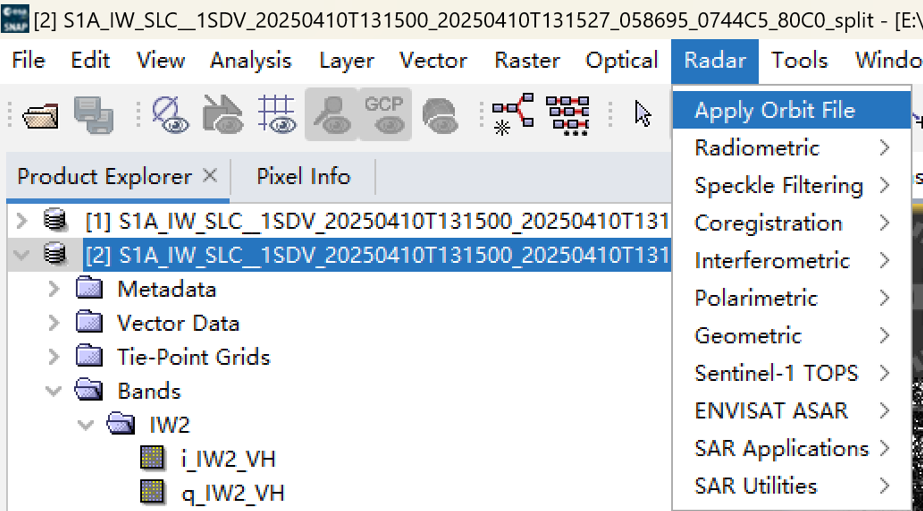
选择工具:【Radar】 -> 【Apply Orbit File】。
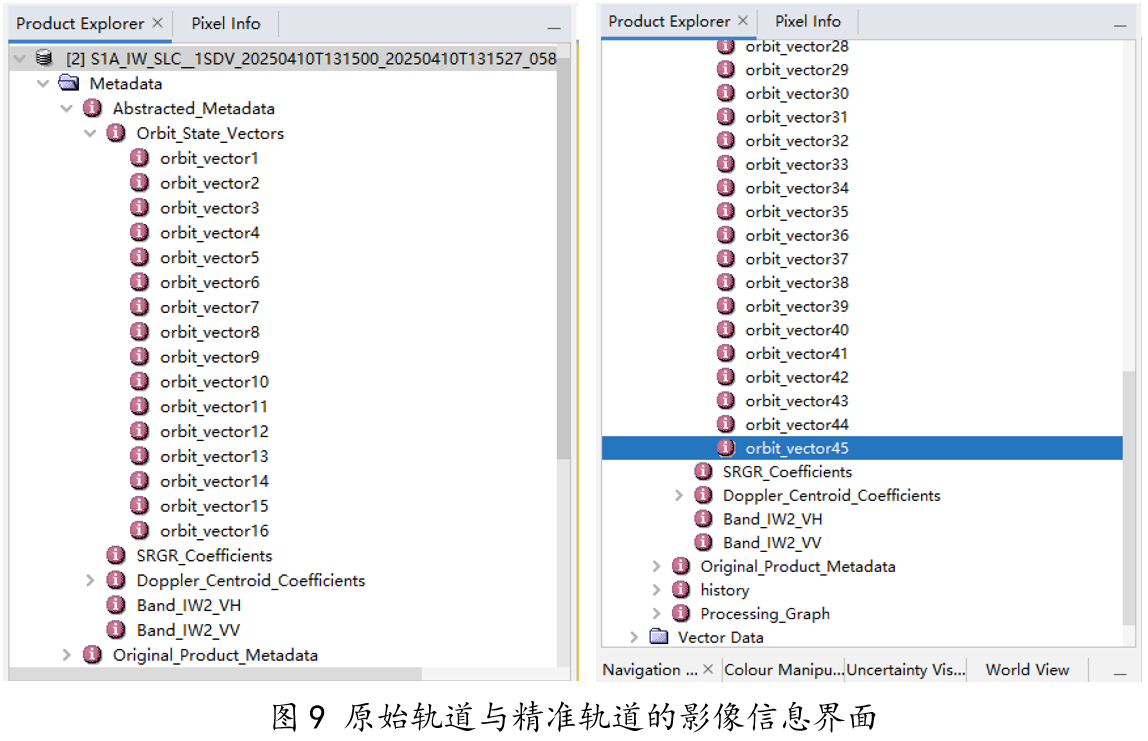
按照默认设置,输入的数据是Split的结果,输出的轨道由原来的16变成了45,同时文件的后缀也多了“_Orb”。
4、热噪声去除
目的:去除系统噪声背景,提高图像质量。Sentinel-1 影像受到热噪声的影响,热噪声的来源是 SAR 卫星系统的噪声,也可认为是背景噪声。热噪声去除操作可以对整个 Sentinel-1 场景中的后向散射信号进行归一化,从而减少子带纹理中的噪声。
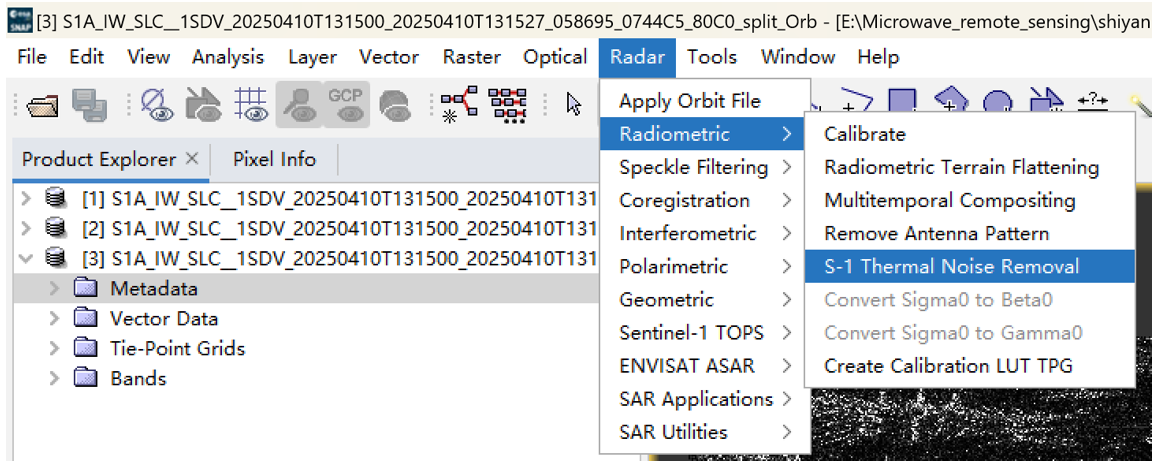
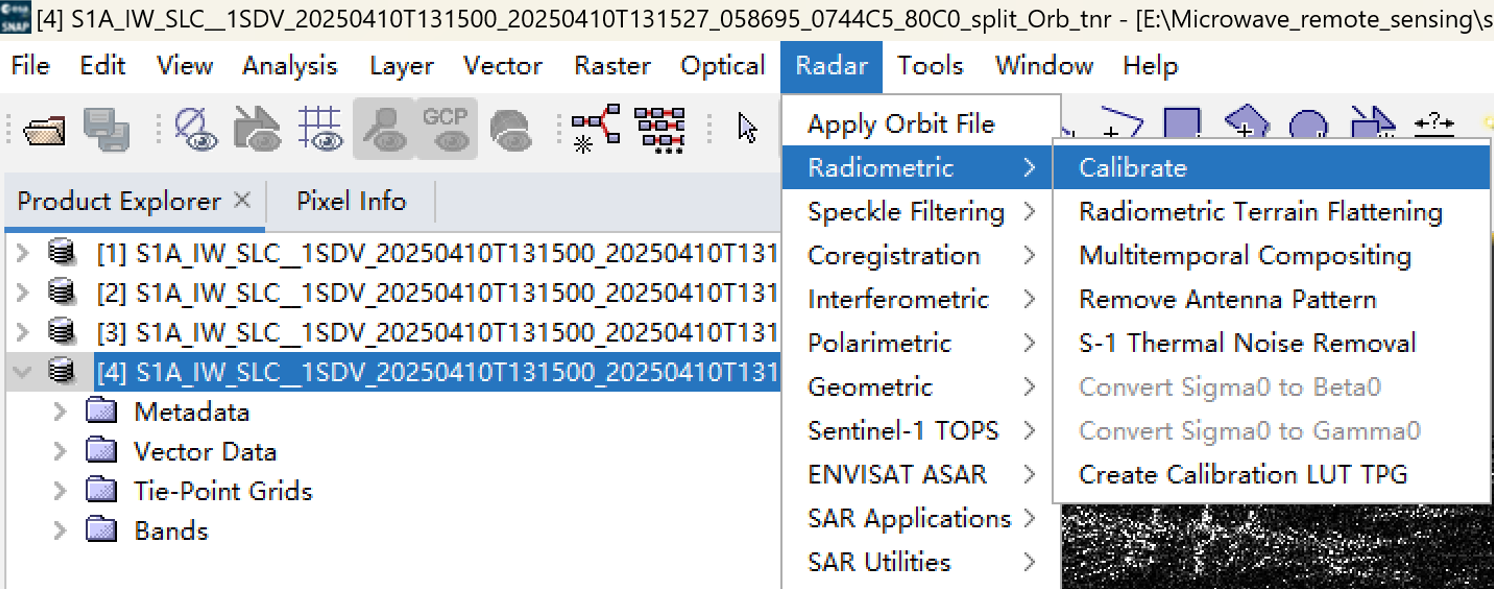
工具:【Radar】 -> 【Radiometric】 -> 【S-1 Thermal Noise Removal】。
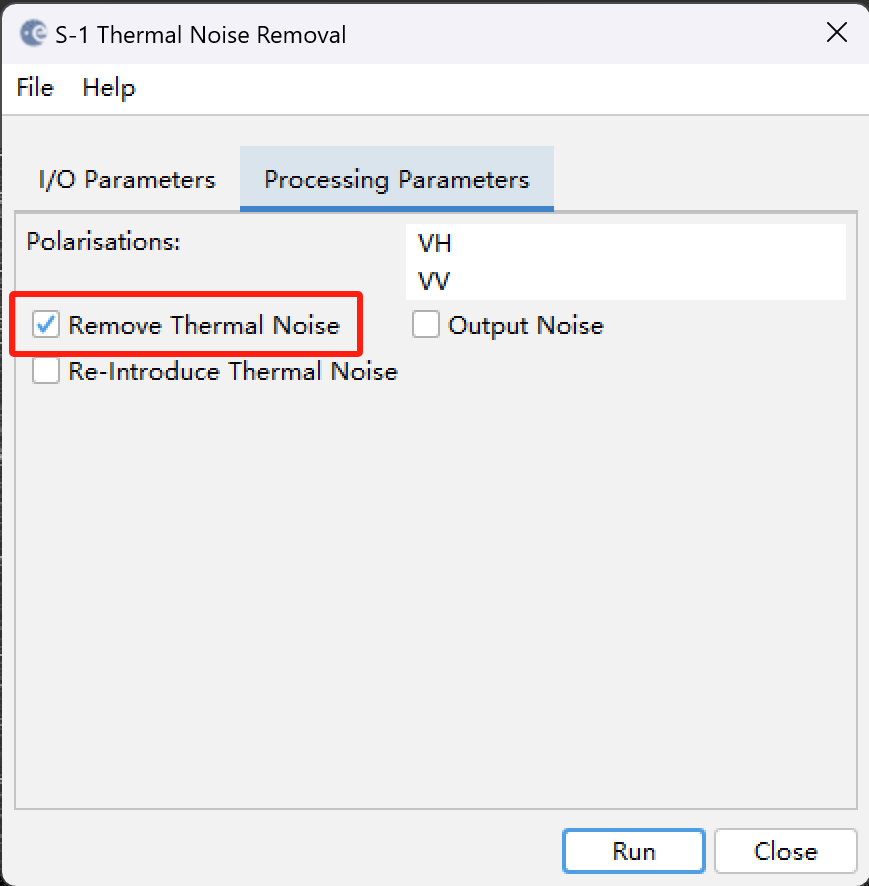
在【Processing Parameter】界面中,检查【Remove Thermal Noise】是勾选的状态,输入的数据是精密轨道的结果,其他保持默认,输出的结果后缀是“_tnr”。
结果显示:可以看出图像的纹理更加清晰,类似像斑点一样的噪声也去除了一些。
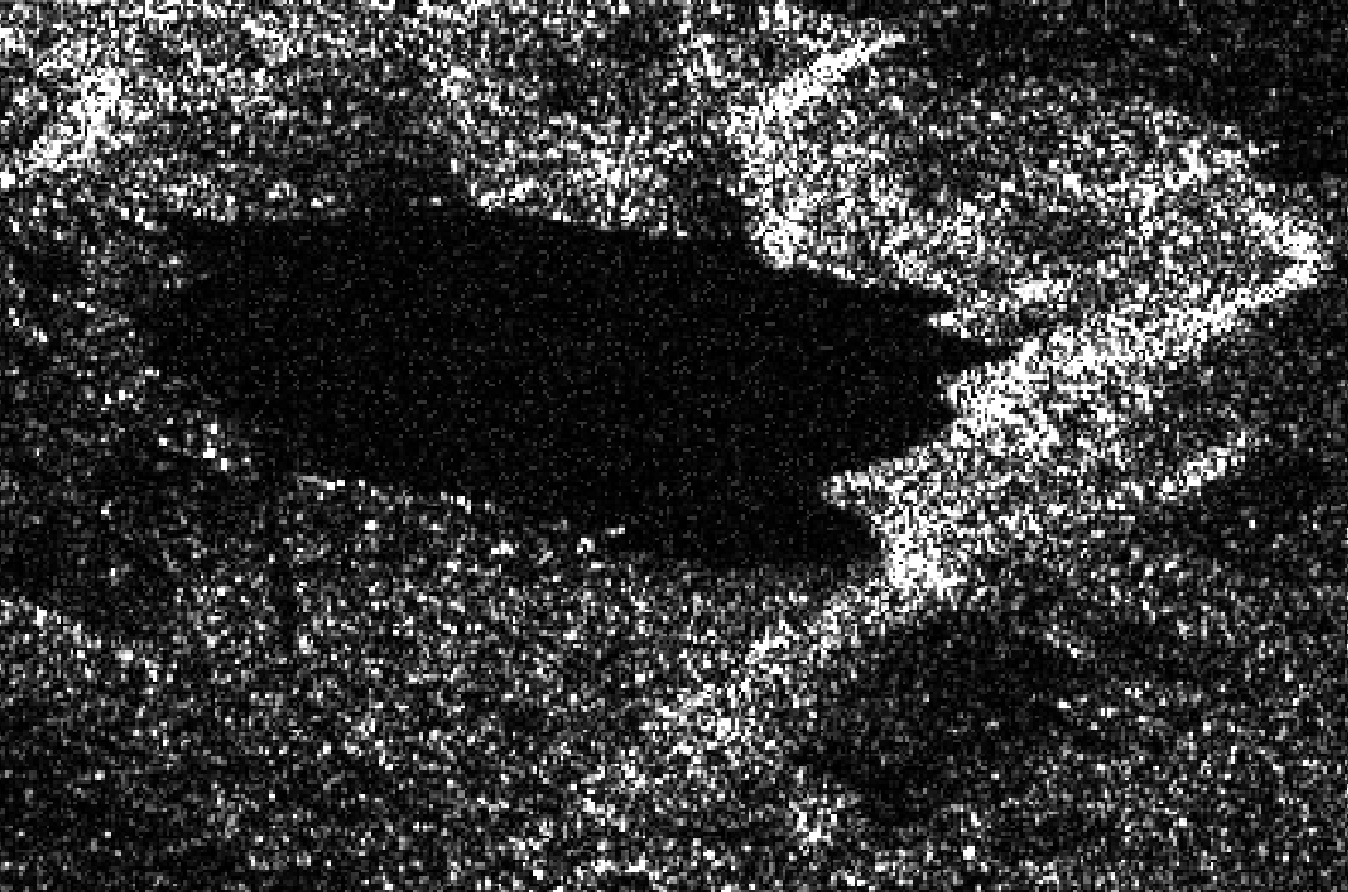
去热噪声之前的影像
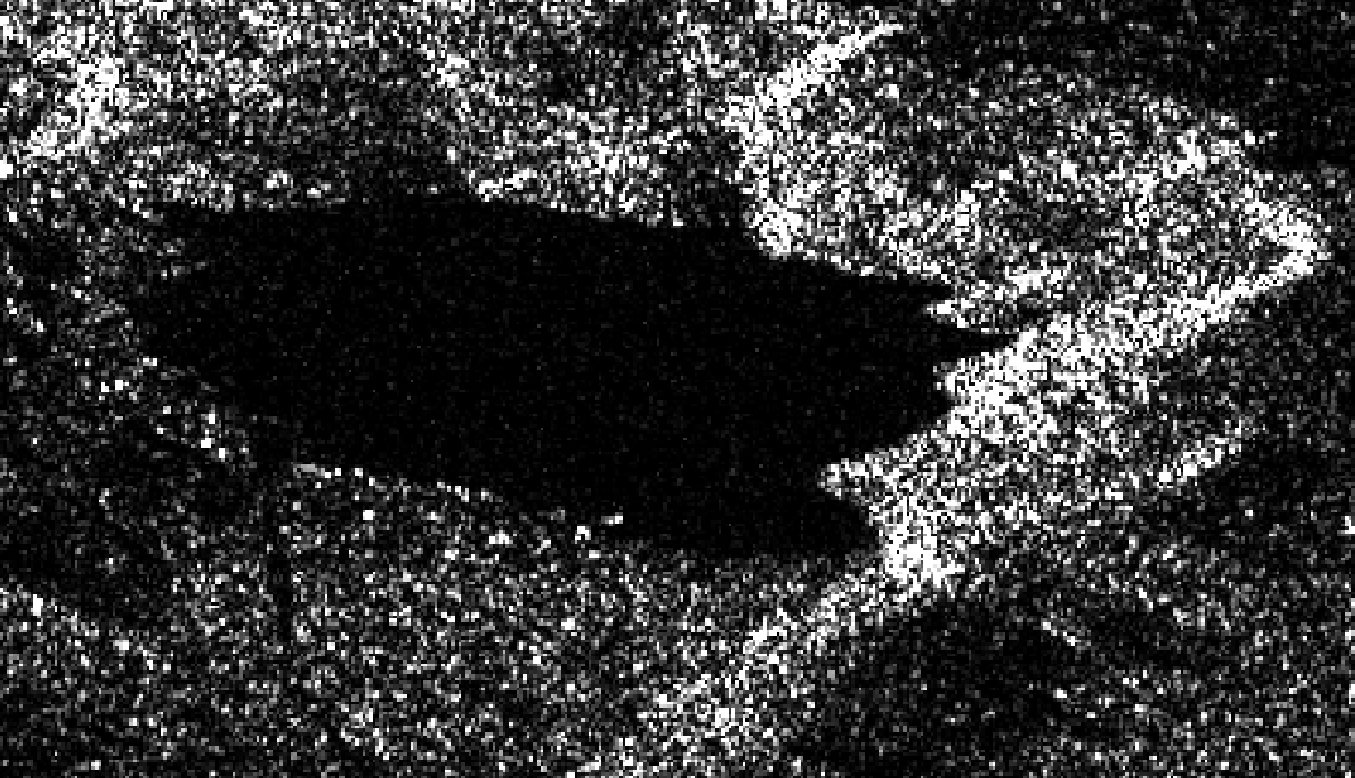
去热噪声之后的影像
5、辐射校正
目的:将像元值转换为后向散射系数,便于量化比较。具体来说,SAR 辐射定标的目的是将其像素值与某地区的后向散射进行关联,将接收的信号转化为后向散射系数,使每个像素值可以反映某地区实际的后向散射情况。影像经过校准,可以直接与相同或不同传感器收集的影像进行比较。
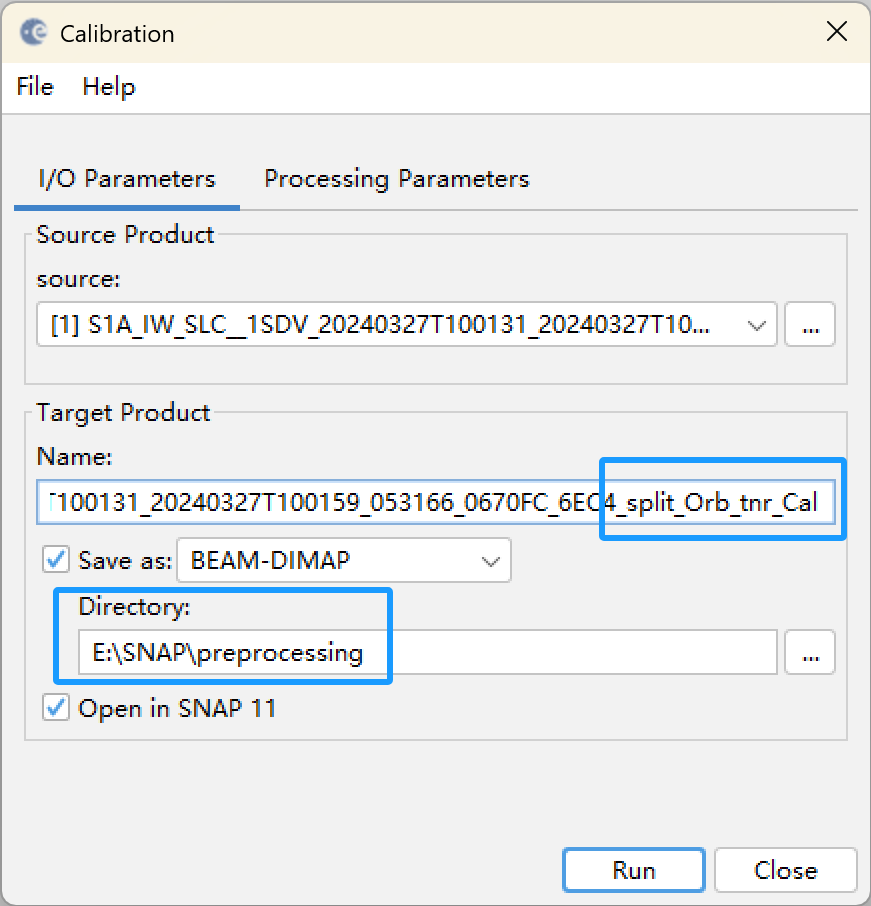
工具:【Radar 】->【 Radiometric】 -> 【Calibrate】。
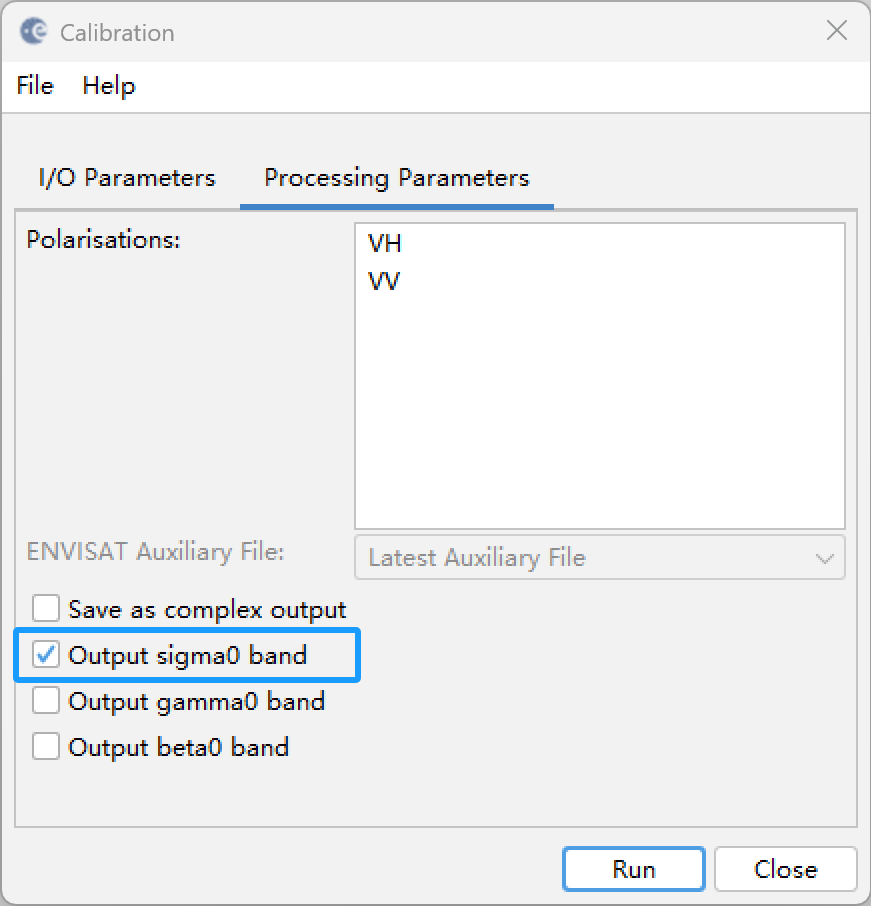
在【Processing Parameter】界面中,勾选【Output sigma0 band】,输入的数据是上一步的去除热噪声结果,其他保持默认。
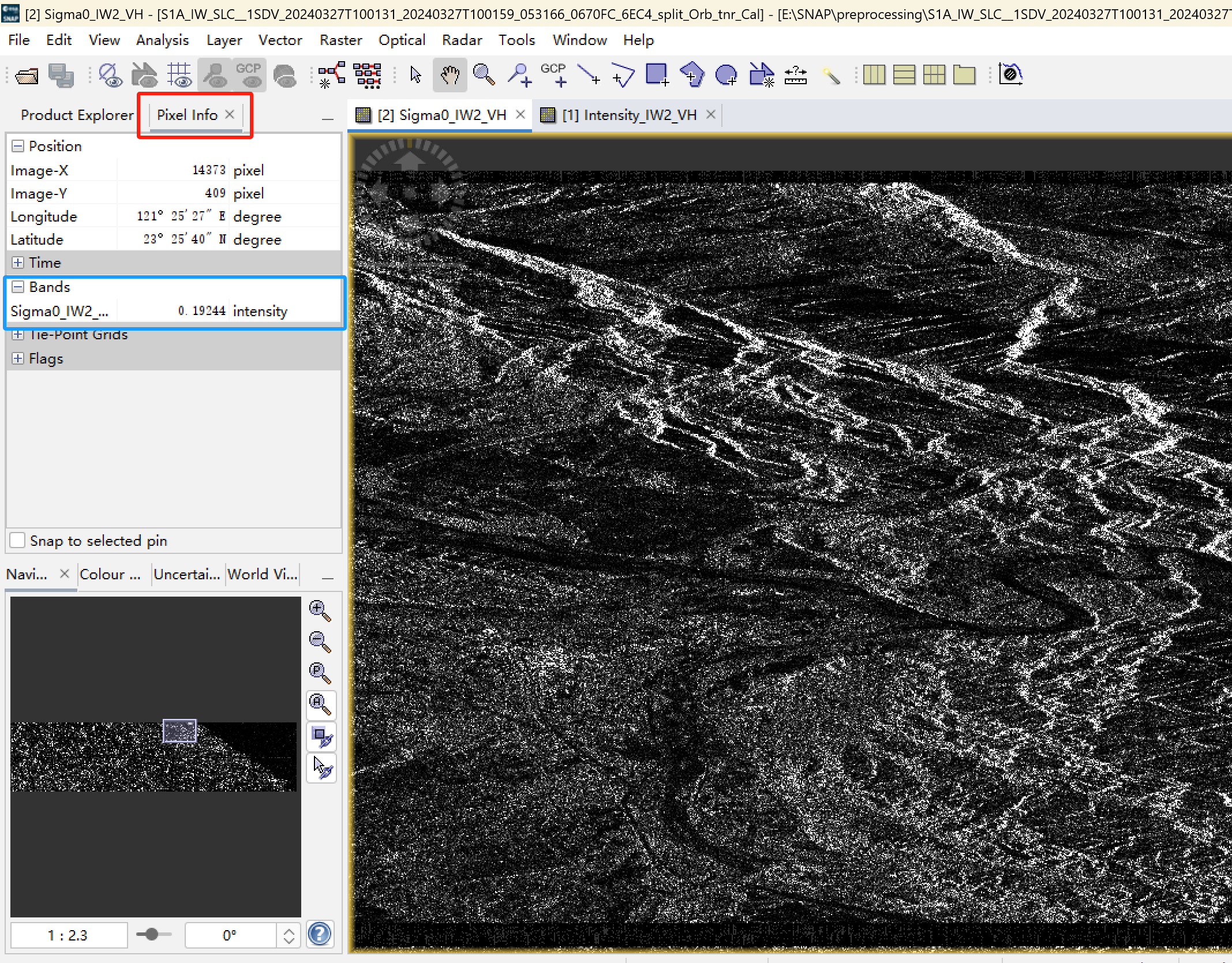
辐射校正后,可以打开【Pixel Info】查看对应像素的像素值。这个【Pixel Info】查看像素值功能可用于波段计算。
6、去条带处理
去除的是Sentinel-1 IW SLC影像带有burst带(脉冲带)的暗带部分(黑色背景,无信号部分),效果就是合并所有burst带有效信号部分。
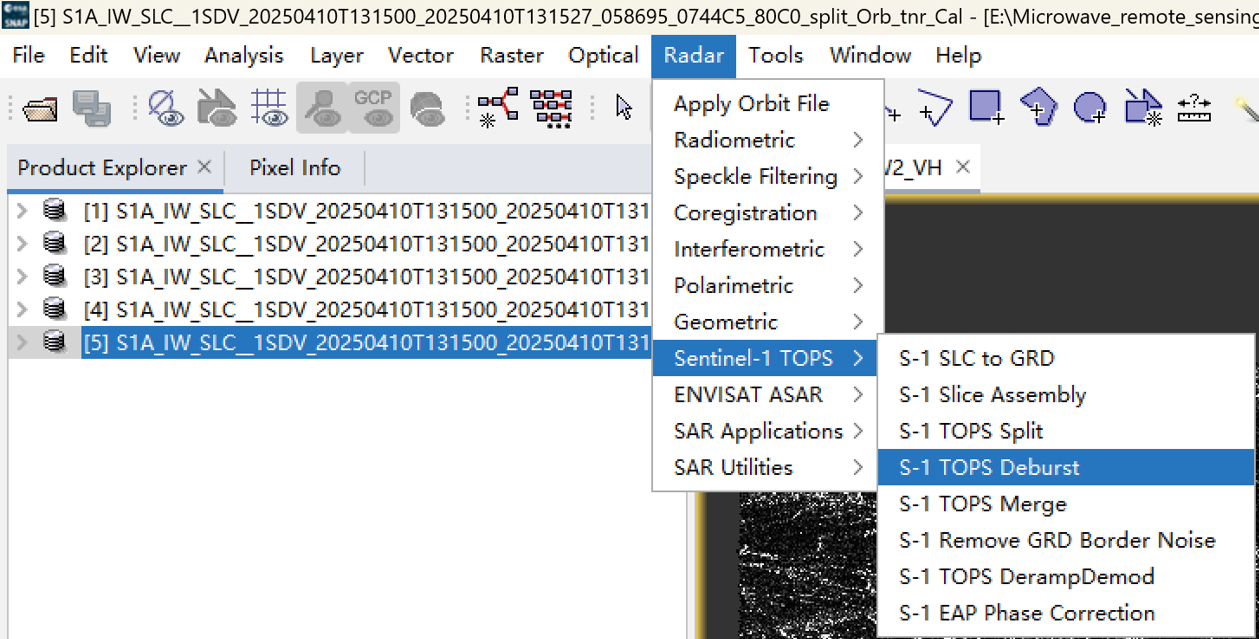
工具:【Radar】 -> 【Sentinel-1 TOPS】 -> 【S-1 TOPS Deburst】。
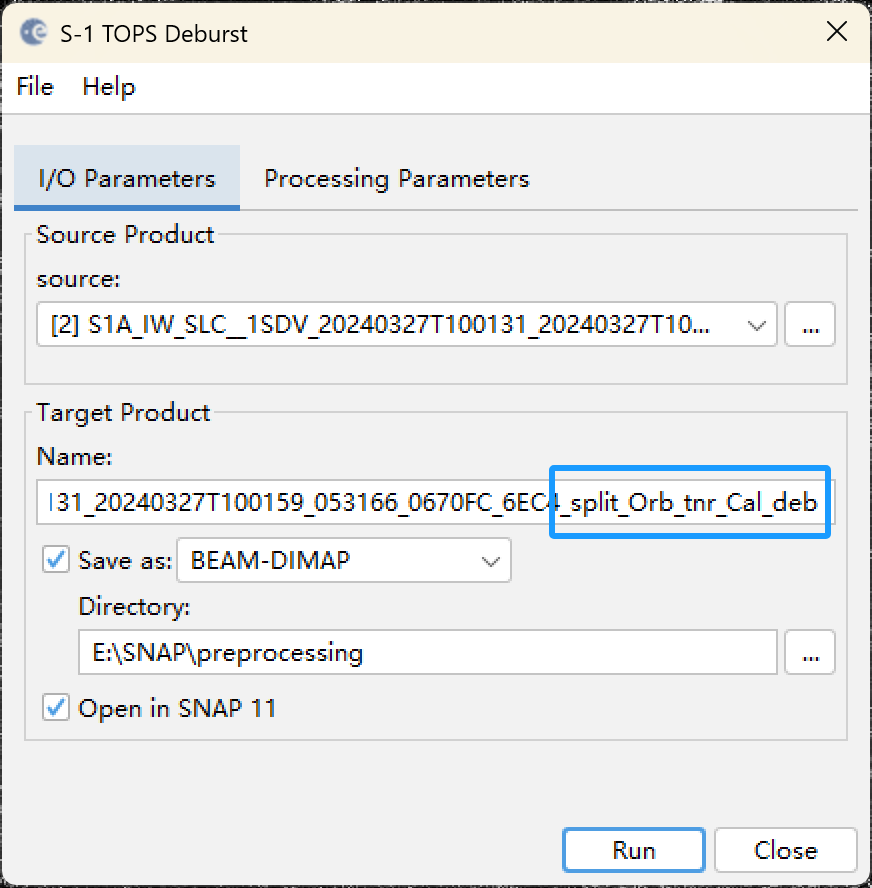
在【Processing Parameter】界面中,输入的数据是上一步的辐射校正结果,其他保持默认。
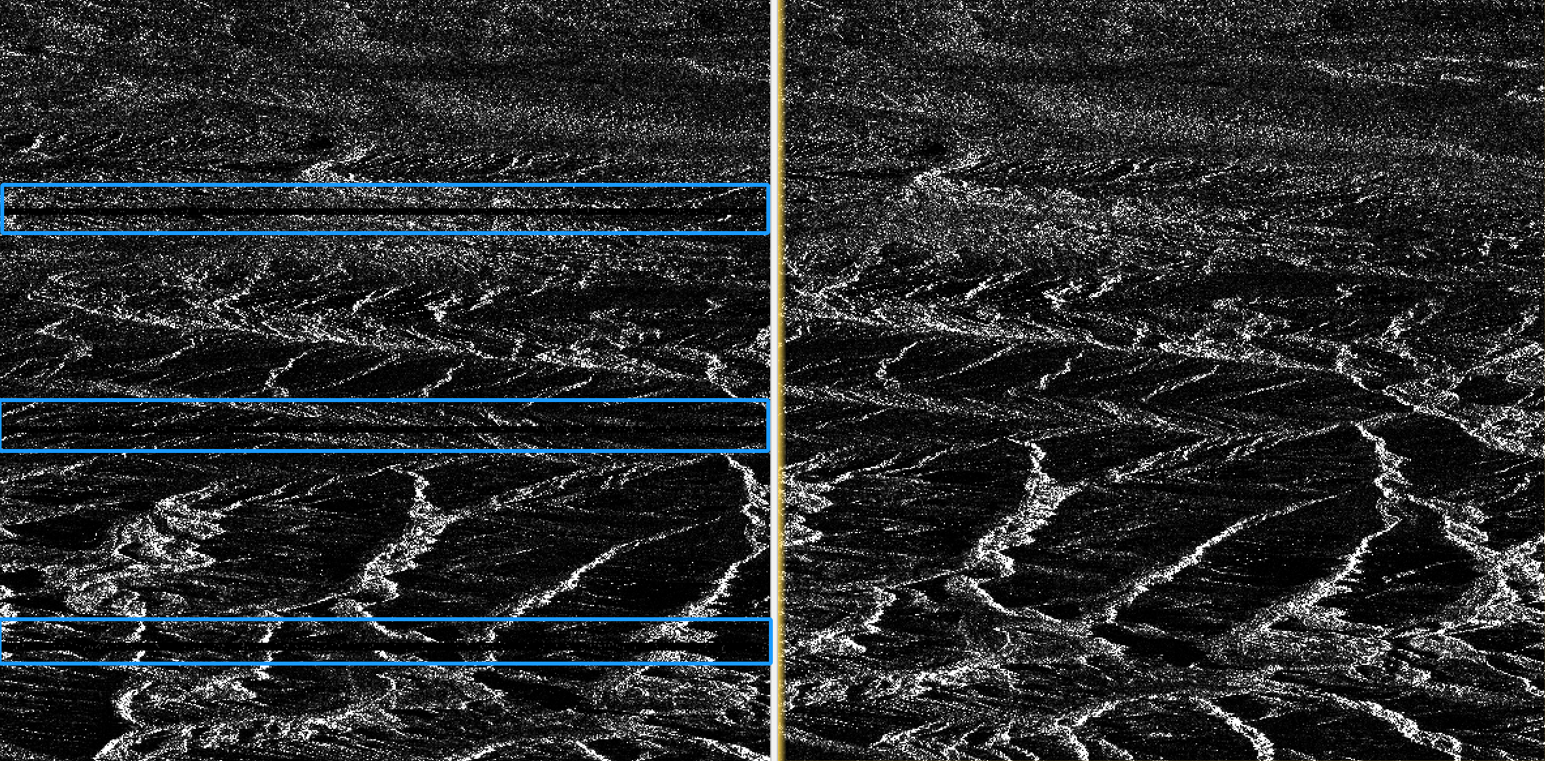
结果如下图所示,左侧是去条带前,右边是去条带后,可以发现图像已经变得连续了。
7、多视
目的:SAR原始数据的像素通常是高度不对称的(例如该影像的距离向分辨率约为2.3米,方位向分辨率约为14米)。通过多视处理可调整像素长宽比,使其更接近1:1,便于与其他地理数据(如光学影像)对齐或可视化。
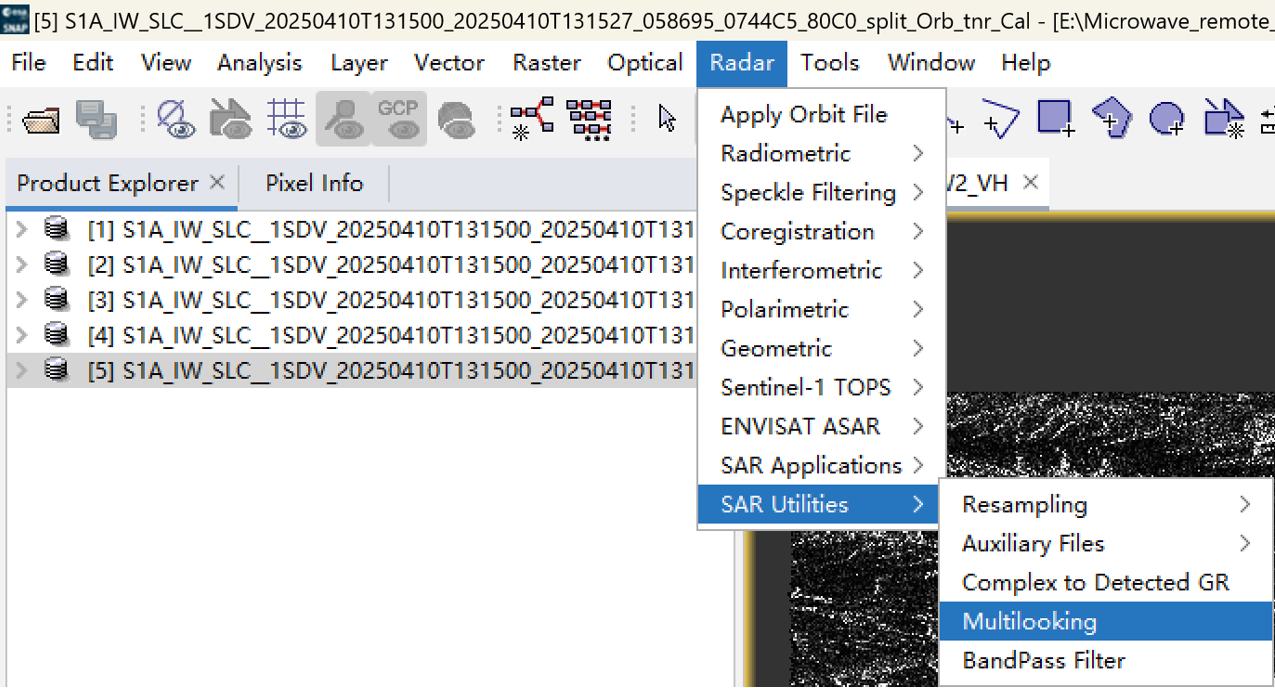
工具:【Radar】 -> 【SAR Utilities】 -> 【Multilooking】。
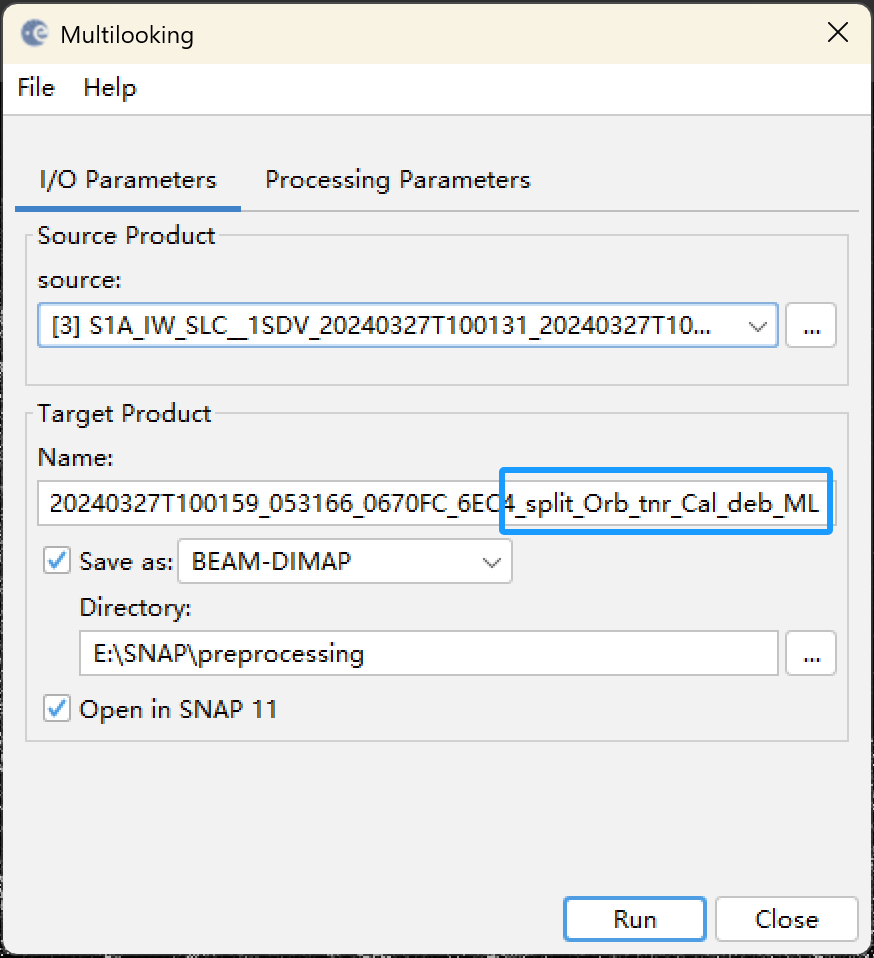
在【Processing Parameter】界面中,输入的数据是上一步的去条带处理结果,其他保持默认。
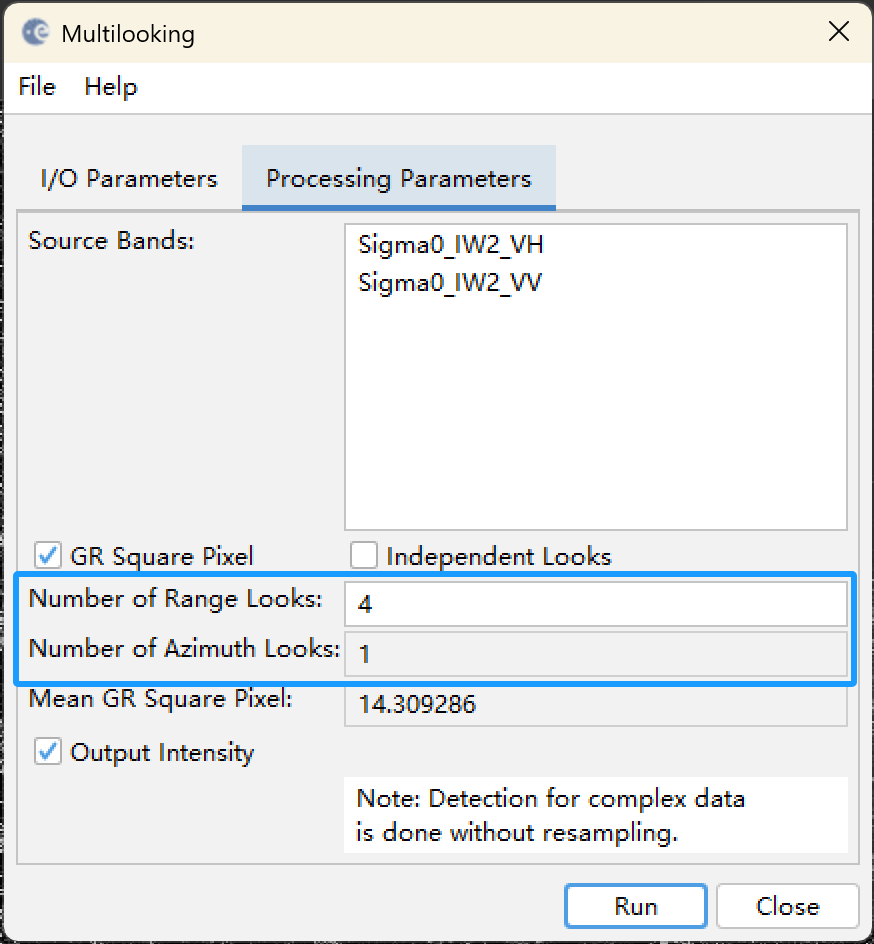
这里的【Number of Range Looks】设置的是4(默认),而 【Number of Azimuth Looks】设置的是1(默认),可以理解为每4个距离像上的像素合在一起,从原来的大概2.3m -> 2.3*4=9.2m,所以分辨率在多视之后的结果,就变成了如下所示分辨率(在【Abstracted Data】中可以查看)。

输出的结果如下图所示,现在的图像已经能够展示地物的几近真实的样貌了。
这里可以回顾之前的说的上下倒置的情况,这里就可以明显看出来了。
8、斑点噪声去除
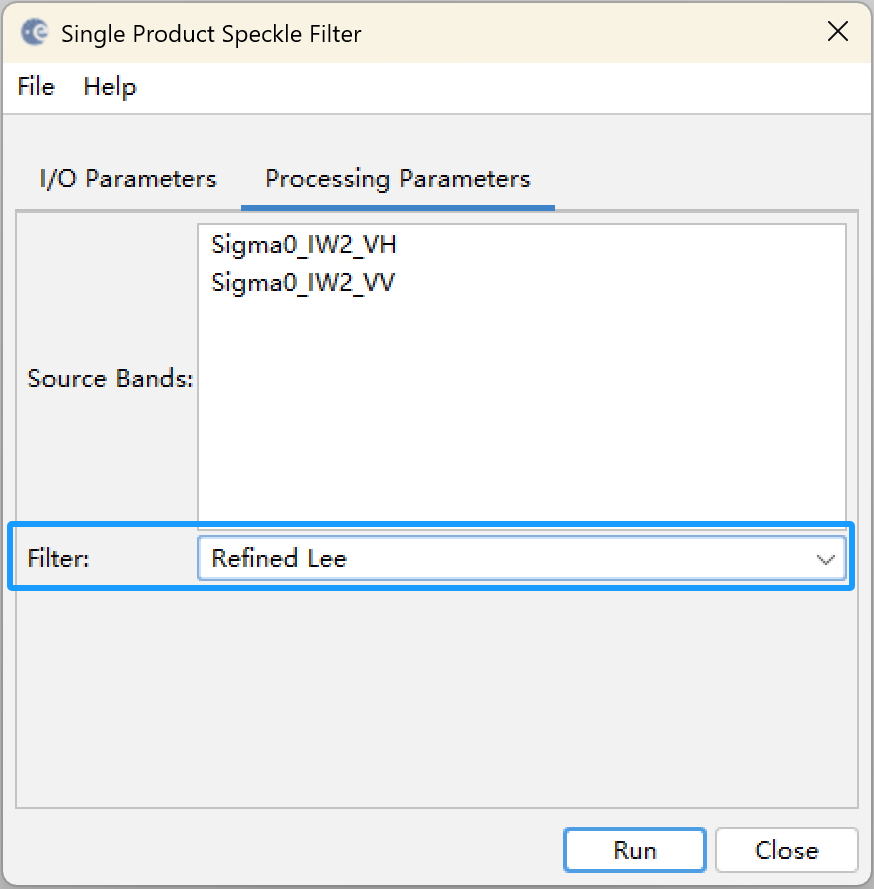
微波波段的相干噪声会降低 SAR 影像的质量,使影像中存在颗粒噪声形式的斑点。因此需要通过斑点滤波进行斑点噪声的抑制处理来提高图像质量。为去除数据中的相干斑噪声,使用 Refined Lee滤波器,它是一种能够根据区域自动调整滤波窗口的自适应滤波器,并且能够保留地物的边缘信息。
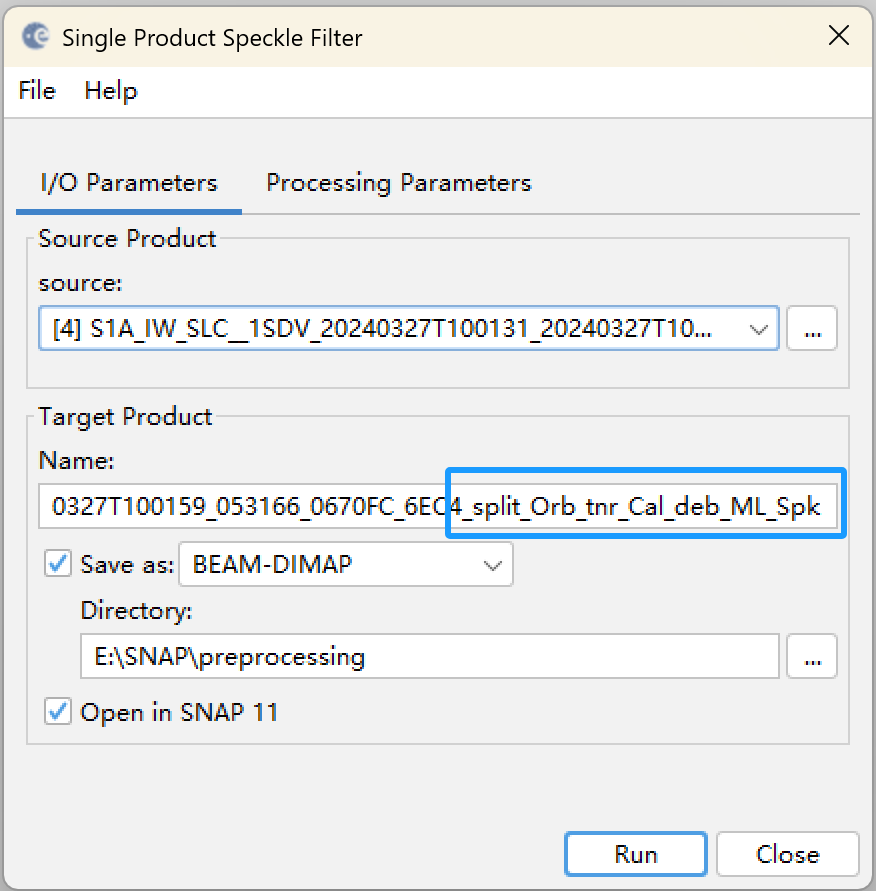
工具: 【Radar】-> 【Speckle Filtering】 -> 【Single Product Speckle Filter】。
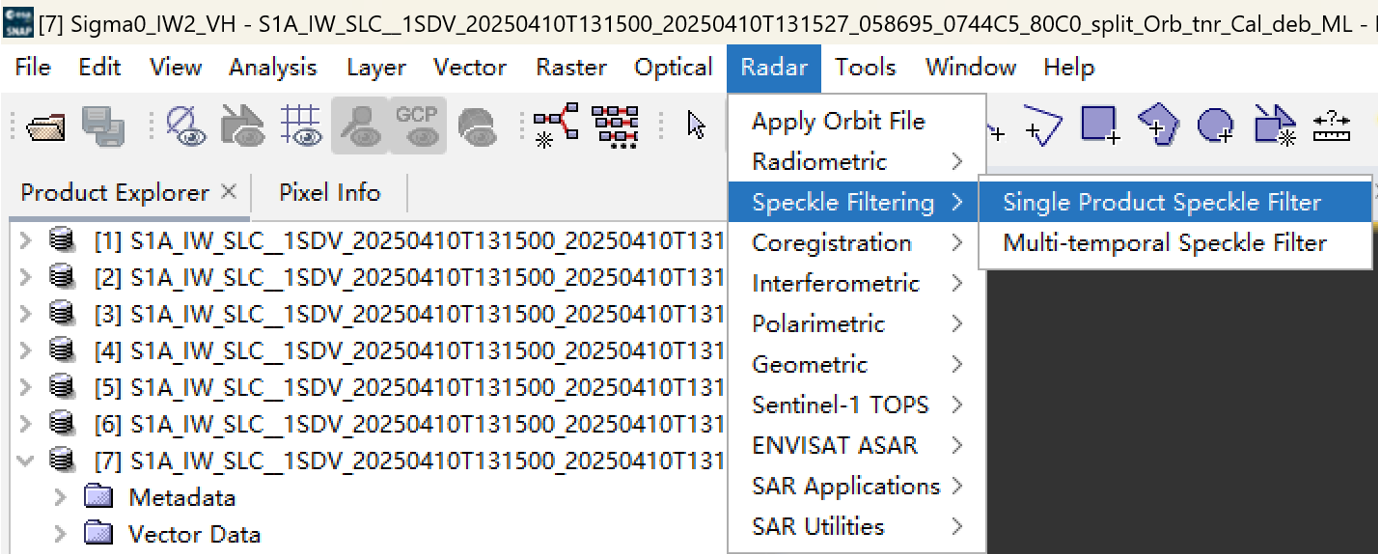
在【Processing Parameter】界面中,选择【Refined Lee】滤波器(按需选择),输入的数据是上一步的多视结果,其他保持默认。
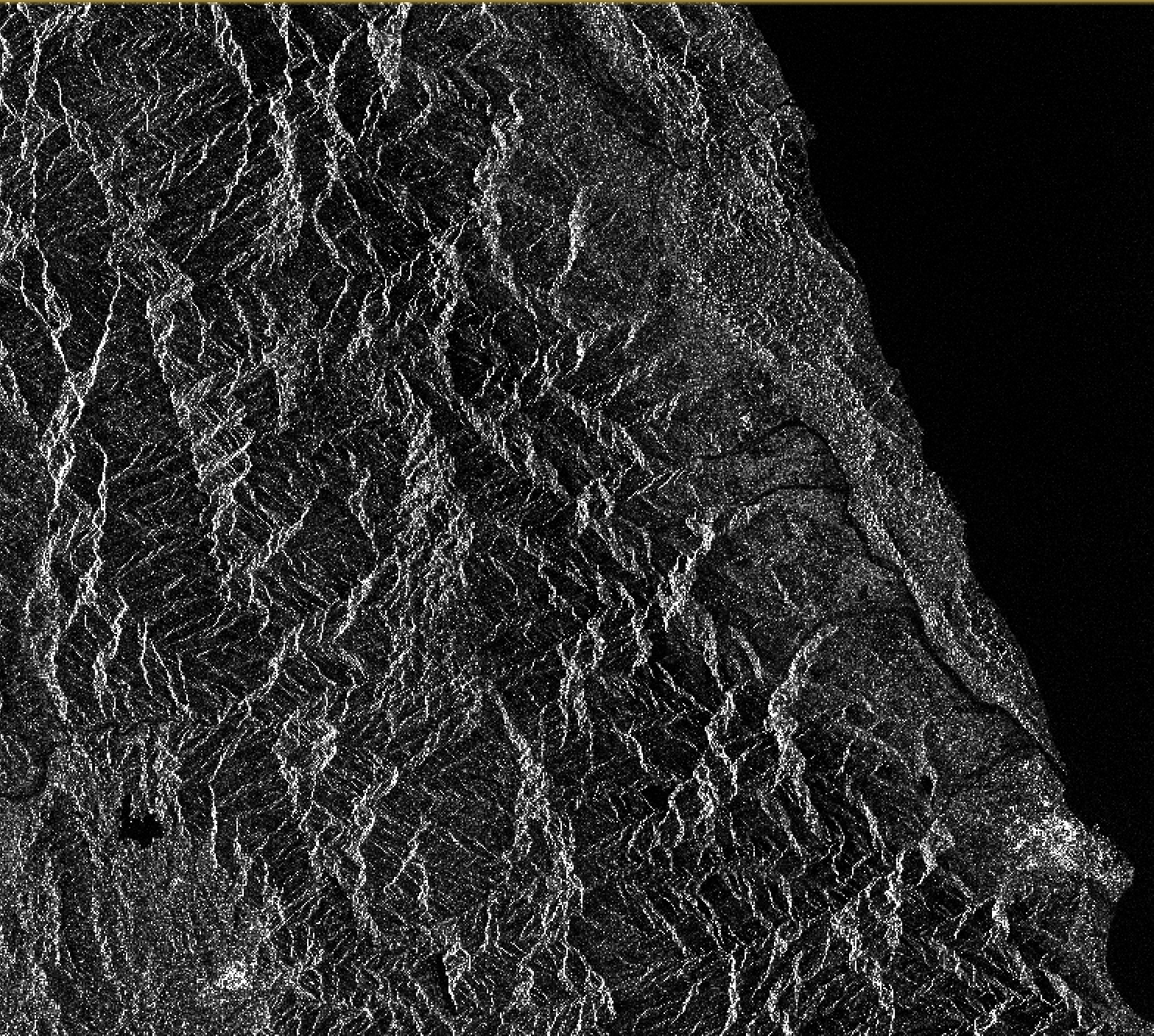
如下图所示,图像变得平滑,斑点噪声抑制,地物轮廓更加清晰。
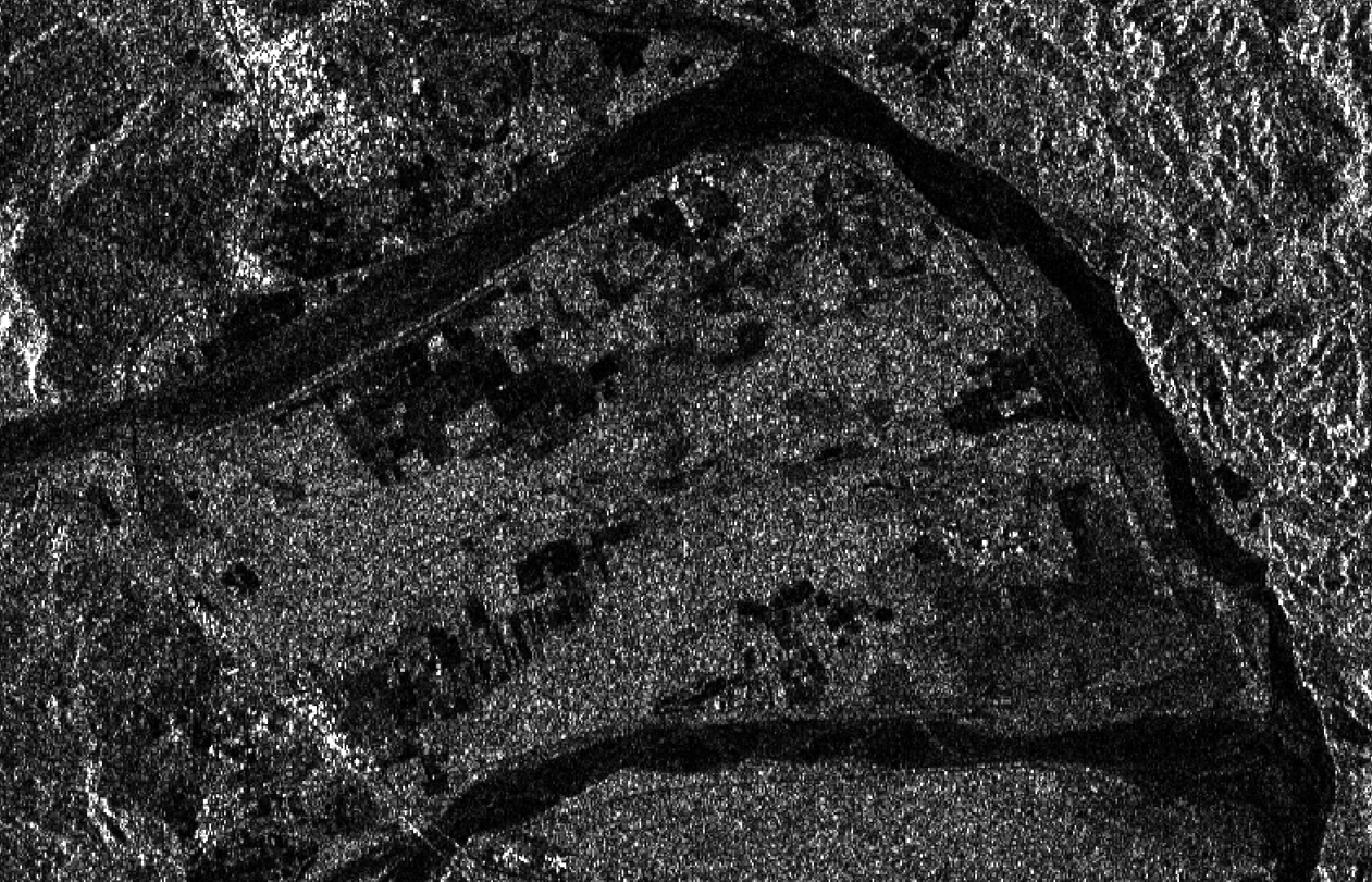
滤波前
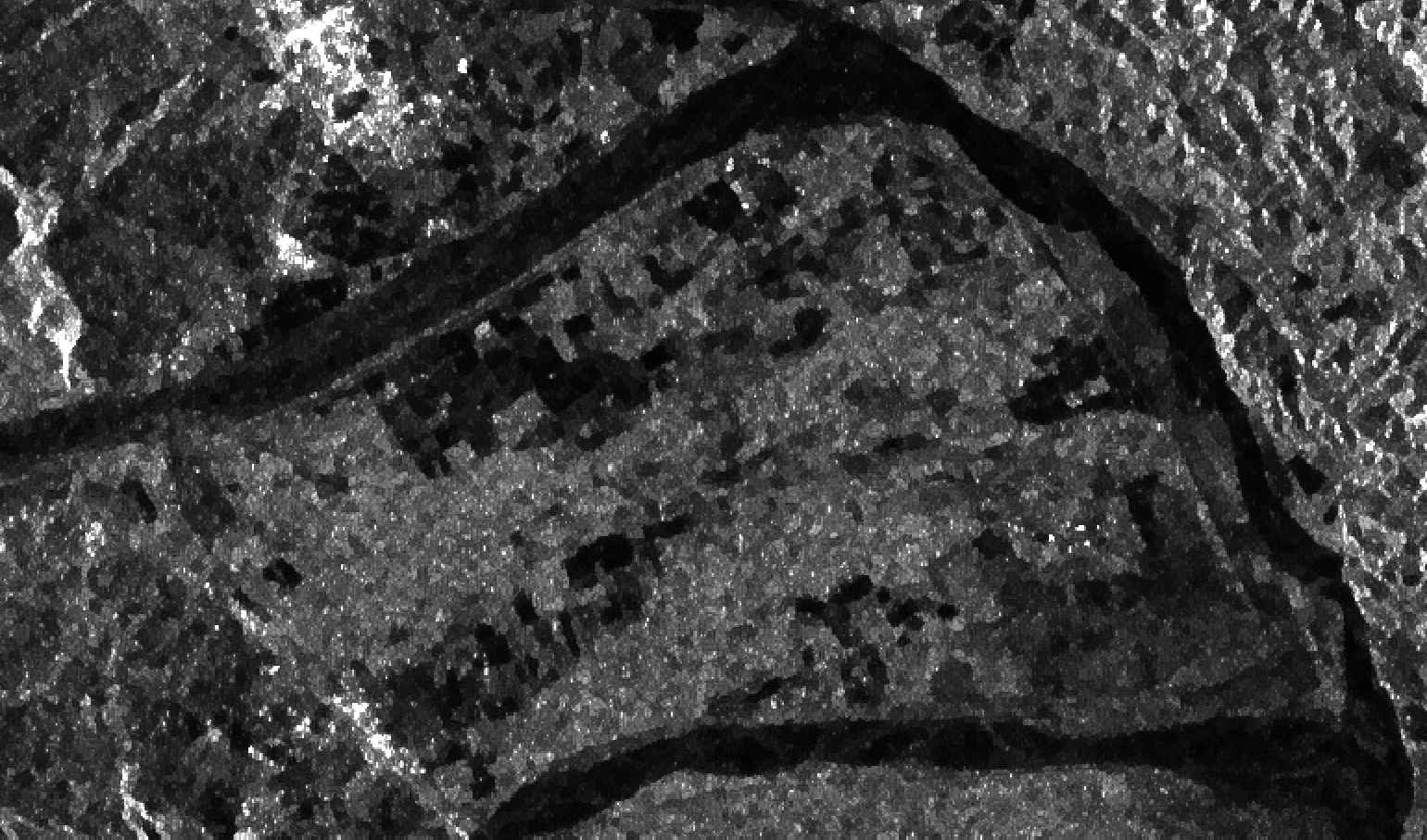
滤波后
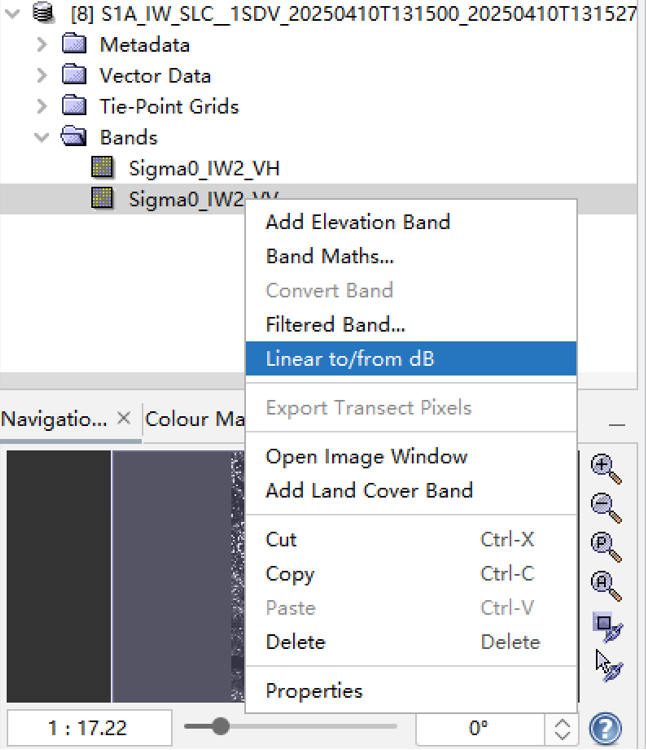
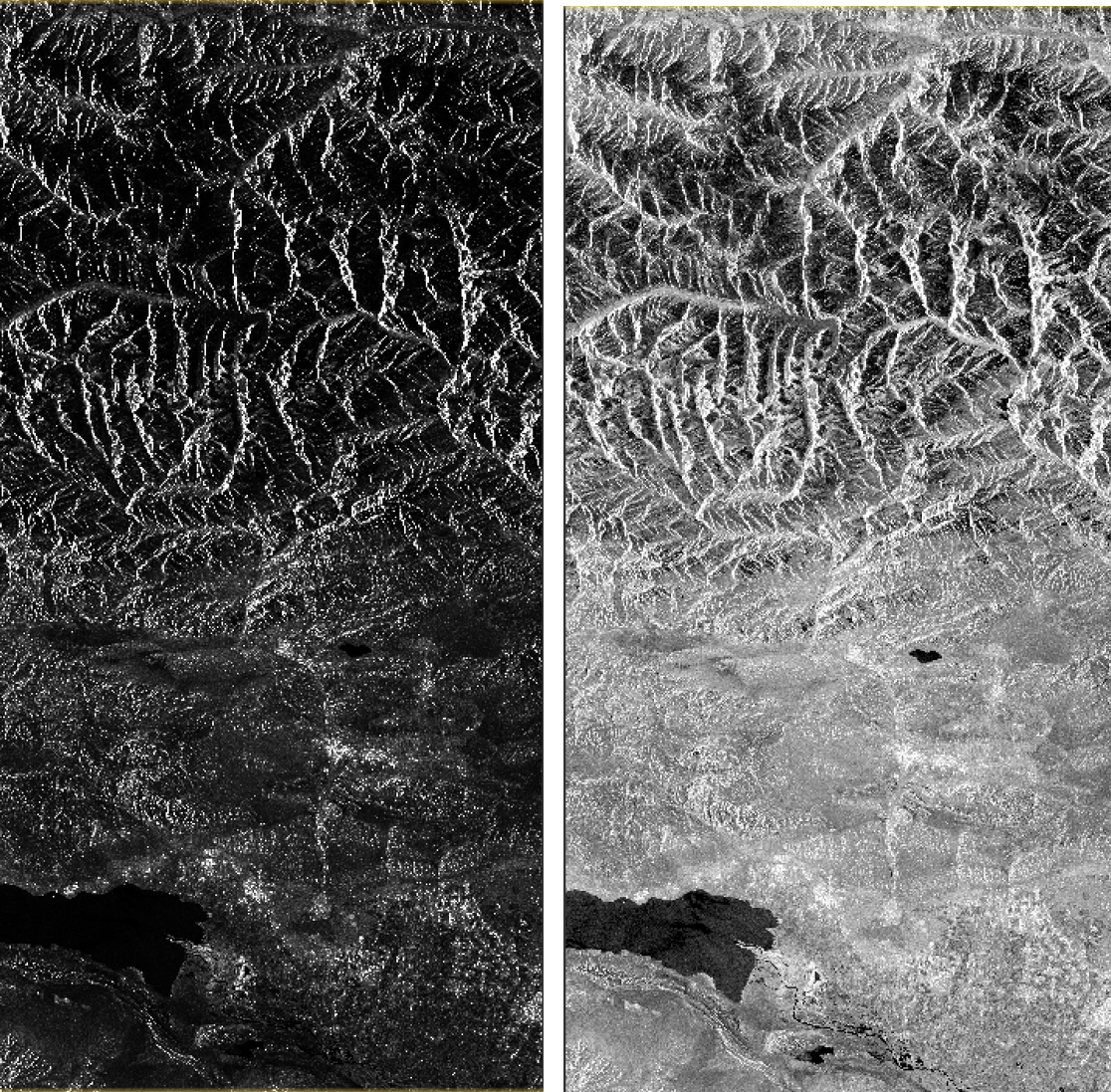
【选做/非必要步骤】:上述操作得到的是线性后向散射系数,其值通常是很小的正值,为了使后向散射系数分布更加均匀,减少极端值,数据整体更符合高斯分布,此处将影像的后向散射系数转化为分贝计量的后向散射系数。具体步骤是对影像右键,选择【Linear to/from db】。
结果如下图所示,左侧是转分贝前,右侧是转分贝后。图像更明亮些,地物也更容易分辨。
9、地理编码
目的:将坐标系转成需要的WGS84坐标系,恢复地理位置,方便后续的目视解译。
工具:【Radar】 ->【Geometric】->【Terrain Correction】->【Range-Doppler Terrain Correction】 ,在【Processing Parameter】界面中,输入的数据是上一步的斑点噪声去除结果,其他保持默认。
现在的影像就恢复成正常影像的样子了。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 44
44 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)