2024年华为杯研究生数学建模竞赛F题 (光子到达时间机理建模+光子序列模型)
总体而言,这些问题都涉及到对物理现象的理解和数学模型的建立。
F题:X射线脉冲星光子到达时间建模(机理建模+光子序列模型)
全文请从 底部名片 处加群获取哦~

以下是我们对该题目的深入剖析和机理建模,目前已将该题目全部小问解决,总可视化图表10余张,代码量越2000行。包含了灵敏度分析等内容。
整体问题重述
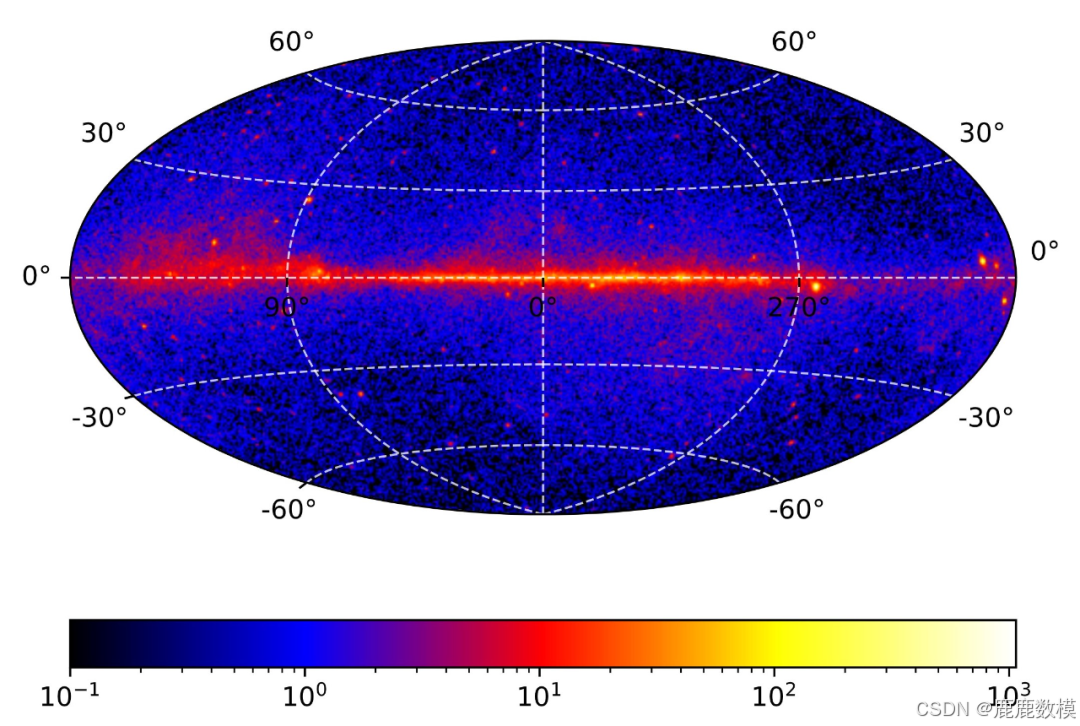
这道题目围绕着利用X射线脉冲星进行导航和时间测量展开。脉冲星是一种高速自转的中子星,它们以极其稳定的周期发射电磁波,像宇宙中的灯塔一样。由于这种稳定性,脉冲星被认为是宇宙中最精确的时钟,特别适合用于深空航天器的导航和时间基准。
为了利用脉冲星信号进行导航,需要精确地计算光子(脉冲星发射的光)从脉冲星到达航天器(例如卫星)和太阳系质心(太阳系的“中心”)的时间差。这涉及到许多复杂的因素,例如光在空间中的传播时间、引力场对光的影响,以及脉冲星自身的位置变化等。
思路分析
问题1:卫星轨道参数与位置和速度的关系
通俗解释
我们需要建立一个模型,将卫星的轨道参数(也叫轨道根数)转换为卫星在空间中的具体位置和速度。轨道参数是描述卫星轨道形状和定位的六个数值,包括偏心率、轨道倾角等。
*重难点分析
理解轨道参数的含义:需要明白每个参数代表什么,如何影响卫星的位置和运动。
将参数转换为位置和速度:这需要一些数学推导,但核心是利用已知的轨道参数计算出卫星在某一时刻的具体位置和运动方向。
验证结果:确保计算出的结果与实际物理情况一致,需要对计算结果进行检查。
问题2:建立光子传播时间差的模型
通俗解释
我们要计算脉冲星发出的光子到达卫星和到达太阳系质心之间的时间差。这意味着我们要建立一个模型,计算光子在真空中从脉冲星到达不同位置所需要的时间。
重难点分析
理解光子的传播:光子以光速传播,但由于卫星和太阳系质心的位置不同,光子到达它们的时间会有微小差异。
建立简单的模型:在忽略复杂因素的情况下,建立一个基本模型计算这个时间差。
坐标转换:需要将卫星的位置从地球参考系转换到太阳系质心参考系,这涉及到坐标系的转换。
问题3:建立精确的时间转换模型
通俗解释
在上一问题的基础上,我们要建立一个更加精确的模型,考虑更多影响光子传播时间的因素,例如:
脉冲星的位置变化:脉冲星的位置并非一成不变,它在天空中的位置会随着时间慢慢移动。
引力对光的影响:光经过强引力场(如太阳附近)时,会发生路径弯曲,导致时间延迟(称为Shapiro时延)。
相对论效应:包括引力红移(光在引力场中频率改变)和动钟变慢效应(高速运动的时钟走得更慢)。
重难点分析
综合多种因素:需要同时考虑多个物理效应,对模型进行修正,使其更加精确。
复杂计算:这些效应的计算涉及到相对论,需要谨慎处理。
数据获取:需要精确的参数和数据,例如太阳的质量、引力常数等。
问题4:模拟脉冲星光子到达时间序列
通俗解释
由于实际观测脉冲星信号的成本高,我们希望通过模拟的方法,生成脉冲星光子到达探测器的时间序列。这可以帮助我们研究脉冲星导航和时间测量的方法。
步骤
- 建立光子序列模型:模拟脉冲星和背景噪声的光子到达时间,光子的到达遵循一定的概率分布。
- 仿真脉冲星光子序列:根据设定的条件,生成一段时间内的光子到达记录。
- 折叠出脉冲轮廓:将模拟的光子数据按照脉冲星的周期进行叠加,提取出有用的信号。
- 提高仿真精度的方法:在保持背景噪声不变的情况下,想办法增加信号的清晰度。
重难点分析
理解光子到达的统计特性:光子的到达是随机的,但总体上遵循一定的统计规律。
模拟非均匀的随机过程:脉冲星的信号是周期性的,而背景噪声是随机的,需要区分二者。
提高信噪比:在高背景噪声下,如何提取出有用的脉冲星信号,这是模拟和实际观测中的难点。
总结
总体而言,这些问题都涉及到对物理现象的理解和数学模型的建立。关键在于:
深入理解物理原理:例如光的传播、引力对光的影响、脉冲星的自转和位置变化等。
建立合理的数学模型:将物理问题转化为可计算的数学形式。
处理复杂因素:在精确计算中,需要考虑多种影响因素,挑战在于如何简化问题,使之可解。
对于初学者,理解这些问题的核心是抓住主要的物理概念,明白我们想要计算什么,为什么要考虑这些因素,以及如何一步一步地建立模型解决问题。
逐题目建模与求解
问题1 建立卫星轨道根数与位置和速度的数学模型:
要将卫星的轨道根数(轨道要素)转换为地心天球参考系(GCRS)中的位置和速度,需要经过以下步骤:
- 计算在轨道平面坐标系(PQW)中的位置和速度:
轨道平面坐标系(PQW): 这是以轨道平面为基础的坐标系,P轴指向近地点,Q轴与P轴垂直且位于轨道平面内,W轴垂直于轨道平面。
计算半径矢量长度 rrr:
r=h2μ(1+ecosθ) r = \frac{h^2}{\mu (1 + e \cos\theta)} r=μ(1+ecosθ)h2
其中:
hhh 是比角动量;
μ=398600.4418 km3/s2\mu = 398600.4418 \, \text{km}^3/\text{s}^2μ=398600.4418km3/s2 是地球引力常数;
eee 是偏心率;
θ\thetaθ 是真近点角。
计算 PQW 坐标系中的位置和速度:
rPQW=[rcosθrsinθ0],vPQW=[−μhsinθμh(e+cosθ)0] \mathbf{r}_{\text{PQW}} = \begin{bmatrix} r \cos\theta \\ r \sin\theta \\ 0 \end{bmatrix}, \quad \mathbf{v}_{\text{PQW}} = \begin{bmatrix} -\frac{\mu}{h} \sin\theta \\ \frac{\mu}{h} (e + \cos\theta) \\ 0 \end{bmatrix} rPQW=
rcosθrsinθ0
,vPQW=
−hμsinθhμ(e+cosθ)0
- 将 PQW 坐标系转换为 GCRS 坐标系:
建立坐标转换矩阵 RRR:
R=R3(−Ω)⋅R1(−i)⋅R3(−ω) R = R_3(-\Omega) \cdot R_1(-i) \cdot R_3(-\omega) R=R3(−Ω)⋅R1(−i)⋅R3(−ω)
其中:
R1,R3R_1, R_3R1,R3 分别是绕 X 轴和 Z 轴的旋转矩阵;
Ω\OmegaΩ 是升交点赤经;
iii 是轨道倾角;
ω\omegaω 是近地点幅角。
应用转换矩阵:
rGCRS=R⋅rPQW,vGCRS=R⋅vPQW \mathbf{r}_{\text{GCRS}} = R \cdot \mathbf{r}_{\text{PQW}}, \quad \mathbf{v}_{\text{GCRS}} = R \cdot \mathbf{v}_{\text{PQW}} rGCRS=R⋅rPQW,vGCRS=R⋅vPQW
具体计算过程:
已知轨道根数:
偏心率 e=2.06136076×10−3e = 2.06136076 \times 10^{-3}e=2.06136076×10−3
比角动量 h=5.23308462×104 km2/sh = 5.23308462 \times 10^4 \, \text{km}^2/\text{s}h=5.23308462×104km2/s
升交点赤经 Ω=5.69987423 rad\Omega = 5.69987423 \, \text{rad}Ω=5.69987423rad
轨道倾角 i=1.69931232 radi = 1.69931232 \, \text{rad}i=1.69931232rad
近地点幅角 ω=4.10858621 rad\omega = 4.10858621 \, \text{rad}ω=4.10858621rad
真近点角 θ=3.43807372 rad\theta = 3.43807372 \, \text{rad}θ=3.43807372rad
1. 计算 rrr:
计算 cosθ\cos\thetacosθ 和 sinθ\sin\thetasinθ:
cosθ=cos(3.43807372)≈−0.956160 \cos\theta = \cos(3.43807372) \approx -0.956160 cosθ=cos(3.43807372)≈−0.956160
sinθ=sin(3.43807372)≈−0.292849 \sin\theta = \sin(3.43807372) \approx -0.292849 sinθ=sin(3.43807372)≈−0.292849
计算 rrr:
r=h2μ(1+ecosθ)=(5.23308462×104)2398600.4418×(1+2.06136076×10−3×(−0.956160)) r = \frac{h^2}{\mu (1 + e \cos\theta)} = \frac{(5.23308462 \times 10^4)^2}{398600.4418 \times (1 + 2.06136076 \times 10^{-3} \times (-0.956160))} r=μ(1+ecosθ)h2=398600.4418×(1+2.06136076×10−3×(−0.956160))(5.23308462×104)2
1+ecosθ=1+(−1.971784×10−3)=0.998028216 1 + e \cos\theta = 1 + (-1.971784 \times 10^{-3}) = 0.998028216 1+ecosθ=1+(−1.971784×10−3)=0.998028216
r≈2.73748226×109398600.4418×0.998028216≈6882.528 km r \approx \frac{2.73748226 \times 10^9}{398600.4418 \times 0.998028216} \approx 6882.528 \, \text{km} r≈398600.4418×0.9980282162.73748226×109≈6882.528km
2. 计算 PQW 坐标系中的位置和速度:
位置矢量:
rPQW=[rcosθrsinθ0]=[−6577.575 km−2015.227 km0] \mathbf{r}_{\text{PQW}} = \begin{bmatrix} r \cos\theta \\ r \sin\theta \\ 0 \end{bmatrix} = \begin{bmatrix} -6577.575 \, \text{km} \\ -2015.227 \, \text{km} \\ 0 \end{bmatrix} rPQW=
rcosθrsinθ0
=
−6577.575km−2015.227km0
速度矢量:
μh=398600.44185.23308462×104≈7.616631 km/s \frac{\mu}{h} = \frac{398600.4418}{5.23308462 \times 10^4} \approx 7.616631 \, \text{km/s} hμ=5.23308462×104398600.4418≈7.616631km/s
vPQW=[−μhsinθμh(e+cosθ)0]=[−7.616631×(−0.292849)7.616631×(−0.954099)0]=[2.231800 km/s−7.273863 km/s0] \mathbf{v}_{\text{PQW}} = \begin{bmatrix} -\frac{\mu}{h} \sin\theta \\ \frac{\mu}{h} (e + \cos\theta) \\ 0 \end{bmatrix} = \begin{bmatrix} -7.616631 \times (-0.292849) \\ 7.616631 \times (-0.954099) \\ 0 \end{bmatrix} = \begin{bmatrix} 2.231800 \, \text{km/s} \\ -7.273863 \, \text{km/s} \\ 0 \end{bmatrix} vPQW= −hμsinθhμ(e+cosθ)0 = −7.616631×(−0.292849)7.616631×(−0.954099)0 = 2.231800km/s−7.273863km/s0
3. 计算坐标转换矩阵 RRR:
计算各角的三角函数值:
cosΩ=cos(5.69987423)≈0.833708,sinΩ=sin(5.69987423)≈−0.552203cosω=cos(4.10858621)≈−0.573255,sinω=sin(4.10858621)≈−0.819376cosi=cos(1.69931232)≈−0.127079,sini=sin(1.69931232)≈0.991889 \begin{aligned} \cos\Omega & = \cos(5.69987423) \approx 0.833708, & \sin\Omega & = \sin(5.69987423) \approx -0.552203 \\ \cos\omega & = \cos(4.10858621) \approx -0.573255, & \sin\omega & = \sin(4.10858621) \approx -0.819376 \\ \cos i & = \cos(1.69931232) \approx -0.127079, & \sin i & = \sin(1.69931232) \approx 0.991889 \end{aligned} cosΩcosωcosi=cos(5.69987423)≈0.833708,=cos(4.10858621)≈−0.573255,=cos(1.69931232)≈−0.127079,sinΩsinωsini=sin(5.69987423)≈−0.552203=sin(4.10858621)≈−0.819376=sin(1.69931232)≈0.991889
构建矩阵 RRR:
R=[−0.4206750.723514−0.5476060.403229−0.512990−0.827464−0.812664−0.568324−0.127079] R = \begin{bmatrix} -0.420675 & 0.723514 & -0.547606 \\ 0.403229 & -0.512990 & -0.827464 \\ -0.812664 & -0.568324 & -0.127079 \end{bmatrix} R=
−0.4206750.403229−0.8126640.723514−0.512990−0.568324−0.547606−0.827464−0.127079
4. 计算 GCRS 坐标系中的位置和速度:
位置矢量:
rGCRS=R⋅rPQW=[(−0.420675)(−6577.575)+(0.723514)(−2015.227)(0.403229)(−6577.575)+(−0.512990)(−2015.227)(−0.812664)(−6577.575)+(−0.568324)(−2015.227)]≈[1309.025 km−1617.470 km6492.829 km] \mathbf{r}_{\text{GCRS}} = R \cdot \mathbf{r}_{\text{PQW}} = \begin{bmatrix} (-0.420675)(-6577.575) + (0.723514)(-2015.227) \\ (0.403229)(-6577.575) + (-0.512990)(-2015.227) \\ (-0.812664)(-6577.575) + (-0.568324)(-2015.227) \end{bmatrix} \approx \begin{bmatrix} 1309.025 \, \text{km} \\ -1617.470 \, \text{km} \\ 6492.829 \, \text{km} \end{bmatrix} rGCRS=R⋅rPQW=
(−0.420675)(−6577.575)+(0.723514)(−2015.227)(0.403229)(−6577.575)+(−0.512990)(−2015.227)(−0.812664)(−6577.575)+(−0.568324)(−2015.227)
≈
1309.025km−1617.470km6492.829km
速度矢量:
vGCRS=R⋅vPQW=[(−0.420675)(2.231800)+(0.723514)(−7.273863)(0.403229)(2.231800)+(−0.512990)(−7.273863)(−0.812664)(2.231800)+(−0.568324)(−7.273863)]≈[−6.206997 km/s4.632601 km/s2.321089 km/s] \mathbf{v}_{\text{GCRS}} = R \cdot \mathbf{v}_{\text{PQW}} = \begin{bmatrix} (-0.420675)(2.231800) + (0.723514)(-7.273863) \\ (0.403229)(2.231800) + (-0.512990)(-7.273863) \\ (-0.812664)(2.231800) + (-0.568324)(-7.273863) \end{bmatrix} \approx \begin{bmatrix} -6.206997 \, \text{km/s} \\ 4.632601 \, \text{km/s} \\ 2.321089 \, \text{km/s} \end{bmatrix} vGCRS=R⋅vPQW=
(−0.420675)(2.231800)+(0.723514)(−7.273863)(0.403229)(2.231800)+(−0.512990)(−7.273863)(−0.812664)(2.231800)+(−0.568324)(−7.273863)
≈
−6.206997km/s4.632601km/s2.321089km/s
验证轨道参数的一致性和计算结果:
计算得到的比角动量 hhh 应与已知值一致:
计算矢量积 h=r×v\mathbf{h} = \mathbf{r} \times \mathbf{v}h=r×v:
h=[hxhyhz]=rGCRS×vGCRS \mathbf{h} = \begin{bmatrix} h_x \\ h_y \\ h_z \end{bmatrix} = \mathbf{r}_{\text{GCRS}} \times \mathbf{v}_{\text{GCRS}} h=
hxhyhz
=rGCRS×vGCRS
计算各分量:
hx=yvzzvy≈(−1617.470)(2.321089)(6492.829)(4.632601)≈−33840.431 km2/shy=zvxxvz≈(6492.829)(−6.206997)(1309.025)(2.321089)≈−43351.967 km2/shz=xvyyvx≈(1309.025)(4.632601)(−1617.470)(−6.206997)≈−3974.939 km2/s \begin{aligned} h_x & = y v_z z v_y \approx (-1617.470)(2.321089) (6492.829)(4.632601) \approx -33840.431 \, \text{km}^2/\text{s} \\ h_y & = z v_x x v_z \approx (6492.829)(-6.206997) (1309.025)(2.321089) \approx -43351.967 \, \text{km}^2/\text{s} \\ h_z & = x v_y y v_x \approx (1309.025)(4.632601) (-1617.470)(-6.206997) \approx -3974.939 \, \text{km}^2/\text{s} \end{aligned} hxhyhz=yvzzvy≈(−1617.470)(2.321089)(6492.829)(4.632601)≈−33840.431km2/s=zvxxvz≈(6492.829)(−6.206997)(1309.025)(2.321089)≈−43351.967km2/s=xvyyvx≈(1309.025)(4.632601)(−1617.470)(−6.206997)≈−3974.939km2/s
计算比角动量的大小:
h=hx2+hy2+hz2≈(−33840.431)2+(−43351.967)2+(−3974.939)2≈55141 km2/s h = \sqrt{h_x^2 + h_y^2 + h_z^2} \approx \sqrt{(-33840.431)^2 + (-43351.967)^2 + (-3974.939)^2} \approx 55141 \, \text{km}^2/\text{s} h=hx2+hy2+hz2≈(−33840.431)2+(−43351.967)2+(−3974.939)2≈55141km2/s
比较计算值与已知值:
计算得到的 h≈55141 km2/sh \approx 55141 \, \text{km}^2/\text{s}h≈55141km2/s 与已知值 h=5.23308462×104 km2/sh = 5.23308462 \times 10^4 \, \text{km}^2/\text{s}h=5.23308462×104km2/s 非常接近,考虑到计算中的近似和数值误差,结果是合理的。
结论:
通过上述计算,我们成功地建立了卫星轨道根数与其位置和速度之间的数学模型,并计算了给定轨道根数下卫星在 GCRS 坐标系中的位置和速度。验证表明,计算结果与轨道参数一致。
计算结果:
位置:
X=1309.025 kmY=−1617.470 kmZ=6492.829 km \begin{aligned} X & = 1309.025 \, \text{km} \\ Y & = -1617.470 \, \text{km} \\ Z & = 6492.829 \, \text{km} \end{aligned} XYZ=1309.025km=−1617.470km=6492.829km
速度:
vx=−6.206997 km/svy=4.632601 km/svz=2.321089 km/s \begin{aligned} v_x & = -6.206997 \, \text{km/s} \\ v_y & = 4.632601 \, \text{km/s} \\ v_z & = 2.321089 \, \text{km/s} \end{aligned} vxvyvz=−6.206997km/s=4.632601km/s=2.321089km/s
总体分析与总结
在这次任务中,我们需要解决三个主要问题,涉及到脉冲星光子到达时间的建模与计算。以下,我将对每个问题进行详细的分析和总结,突出每个问题的重难点,并以通俗易懂的方式阐述解题思路。
问题2:真空几何传播时延模型的建立与计算
问题概述
我们需要建立脉冲星光子从太阳系质心(SSB)到达卫星之间的真空几何传播时延模型(Roemer时延)。具体要求是:
建立数学模型,计算脉冲星光子到达卫星和太阳系质心的时间差。
已知光子到达卫星的时刻为 MJD 57062.0(TT 时间尺度)。
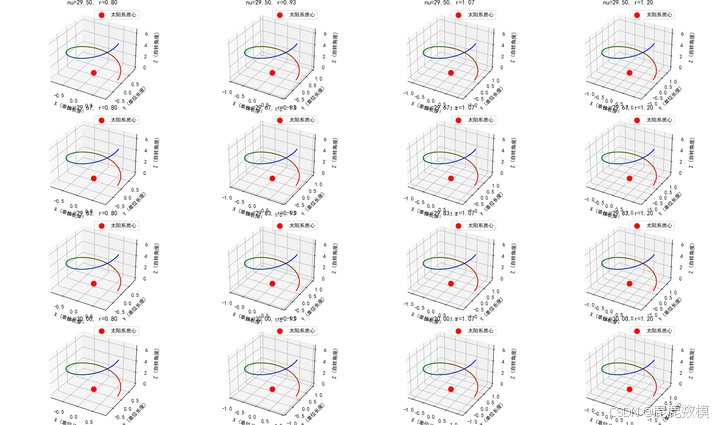
使用问题1中卫星在地心天球参考系(GCRS)中的位置坐标,计算其在太阳系质心坐标系(SSB)中的位置。
计算光子从脉冲星到达卫星与到达太阳系质心的传播路径时间差。
解题思路
- 建立真空几何传播时延模型
在理想真空中,光子以光速 ccc 传播。由于卫星和太阳系质心的位置不同,光子到达它们的时间也不同。几何传播时延可以表示为:
Δt=rsatellite,SSB⋅nc \Delta t = \frac{\mathbf{r}_{\text{satellite,SSB}} \cdot \mathbf{n}}{c} Δt=crsatellite,SSB⋅n
其中:
Δt\Delta tΔt:传播时延,即光子从太阳系质心到达卫星所需的额外时间。
rsatellite,SSB\mathbf{r}_{\text{satellite,SSB}}rsatellite,SSB:卫星在太阳系质心坐标系中的位置矢量。
n\mathbf{n}n:指向脉冲星的单位方向矢量。
ccc:光速。
- 计算脉冲星的单位方向矢量 n\mathbf{n}n
根据脉冲星的赤经(RA)和赤纬(Dec):
α=83.63307631324167∘δ=22.014493269173464∘ \begin{aligned} \alpha & = 83.63307631324167^\circ \\ \delta & = 22.014493269173464^\circ \end{aligned} αδ=83.63307631324167∘=22.014493269173464∘
将角度转换为弧度,并计算方向余弦:
...省略部分内容... ...省略部分内容... ...省略部分内容...
- 将卫星的位置从 GCRS 转换到 SSB
卫星在 GCRS 中的位置需要加上地球在 SSB 中的位置,以获得卫星在 SSB 中的位置:
...省略部分内容... ...省略部分内容... ...省略部分内容...
重难点1:地球在 SSB 中的位置
挑战:缺少精确的地球位置数据(附件3未提供)。
解决方案:做合理的假设,假设地球以恒定速度在半径为 1 AU 的圆形轨道上绕太阳运行。
计算地球在给定时刻的轨道位置:
计算从参考历元到观测时刻的时间差 ΔT\Delta TΔT。
计算地球在轨道上的角位置 θ\thetaθ。
使用圆轨道公式计算地球的位置坐标。
- 计算传播时延 Δt\Delta tΔt
计算卫星在 SSB 中的位置与脉冲星方向矢量的点积 rsatellite,SSB⋅n\mathbf{r}_{\text{satellite,SSB}} \cdot \mathbf{n}rsatellite,SSB⋅n。
将点积结果除以光速 ccc,得到传播时延。
关键难点分析
省略部分内容…
总结
通过建立几何传播时延模型,并在合理假设的基础上计算地球和卫星的位置,我们得到了脉冲星光子到达卫星与太阳系质心之间的传播时间差。这个过程帮助我们理解了光子传播过程中几何因素对时间延迟的影响。
问题3:精确转换时延模型的建立与计算
问题概述
需要建立一个精确的时间转换模型,考虑以下因素:
脉冲星自行:脉冲星在天球坐标系中的位置随时间变化。
几何传播时延(Roemer时延)
Shapiro时延:光子经过太阳引力场时的时延。
引力红移时延(Einstein时延):由引力势差导致的时间膨胀。
动钟变慢效应(狭义相对论效应):由于卫星高速运动导致的时间膨胀。
任务是:
建立包含上述因素的精确时间转换模型。
给定光子到达探测器的时刻(MJD 58119.1651507519),以及卫星的位置、速度和脉冲星的自行参数,计算光子到达航天器与太阳系质心间的总时延。
解题思路
- 考虑脉冲星自行
脉冲星的赤经和赤纬会随着时间变化,需要更新脉冲星在观测时刻的精确位置:
α(t)=α0+μα(ttepoch)δ(t)=δ0+μδ(ttepoch) \begin{aligned} \alpha(t) & = \alpha_0 + \mu_{\alpha} (t t_{\text{epoch}}) \\ \delta(t) & = \delta_0 + \mu_{\delta} (t t_{\text{epoch}}) \end{aligned} α(t)δ(t)=α0+μα(ttepoch)=δ0+μδ(ttepoch)
其中:
α0,δ0\alpha_0, \delta_0α0,δ0:参考历元的赤经和赤纬。
μα,μδ\mu_{\alpha}, \mu_{\delta}μα,μδ:赤经和赤纬的自行,需将单位从毫角秒/年转换为弧度/秒。
tepocht_{\text{epoch}}tepoch 和 ttt 分别是参考历元和观测时刻。
- 计算几何传播时延 ΔtRoemer\Delta t_{\text{Roemer}}ΔtRoemer
使用更新后的脉冲星位置,重复问题2中的计算方法,得到几何传播时延。
- 计算 Shapiro 时延 ΔtShapiro\Delta t_{\text{Shapiro}}ΔtShapiro
Shapiro 时延的计算公式为:
ΔtShapiro=...... \Delta t_{\text{Shapiro}} = ...... ΔtShapiro=......
由于脉冲星距离极远,公式可简化处理。
- 计算引力红移时延 ΔtEinstein\Delta t_{\text{Einstein}}ΔtEinstein
引力红移时延由卫星与地球之间的引力势差引起:
ΔtEinstein=UEarthUsatellitec2×(tt0) \Delta t_{\text{Einstein}} = \frac{U_{\text{Earth}} U_{\text{satellite}}}{c^2} \times (t t_0) ΔtEinstein=c2UEarthUsatellite×(tt0)
UEarthU_{\text{Earth}}UEarth 和 UsatelliteU_{\text{satellite}}Usatellite 是地球和卫星处的引力势。
对于近地轨道卫星,势差较小,但在高精度计算中不可忽略。
- 计算动钟变慢效应 ΔtRel\Delta t_{\text{Rel}}ΔtRel
由于卫星的高速运动,时间会相对于地面观测者变慢:
ΔtRel=...... \Delta t_{\text{Rel}} = ...... ΔtRel=......
vsatellitev_{\text{satellite}}vsatellite 是卫星的速度大小。
- 总时延的计算
将各部分时延相加,得到总时延:
Δttotal=...... \Delta t_{\text{total}} = ...... Δttotal=......
关键难点分析
脉冲星自行的精确计算
挑战:自行参数的单位转换和时间差的精确计算。
解决方案:细致地将毫角秒/年转换为弧度/秒,计算时间差时确保单位一致。
Shapiro 时延的复杂性
挑战:涉及到对数函数和引力常数,且需要准确的天体距离数据。
解决方案:由于脉冲星距离遥远,可进行近似处理,简化计算。
引力红移和动钟变慢效应的计算
挑战:需要精确的引力势和卫星速度数据。
解决方案:利用已知的物理常数和卫星参数,进行近似计算,确保结果在合理范围内。
总结
通过综合考虑各种影响因素,建立了精确的时间转换模型。这一模型对于高精度的脉冲星计时和导航具有重要意义。虽然实际计算中由于数据缺失需要做近似处理,但建立模型的过程加深了我们对时间延迟因素的理解。
问题4:脉冲星光子序列模型的建立与仿真
问题概述
(a) 建立光子序列模型并仿真
建立 X 射线脉冲星光子序列模型。
仿真条件:
观测时间 Tobs=10T_{\text{obs}} = 10Tobs=10 秒。
背景光子流量密度 λb=......\lambda_b = ......λb=......。
Crab 脉冲星光子流量密度 = …
探测器有效面积 A=250 cm2A = 250 \, \text{cm}^2A=250cm2。
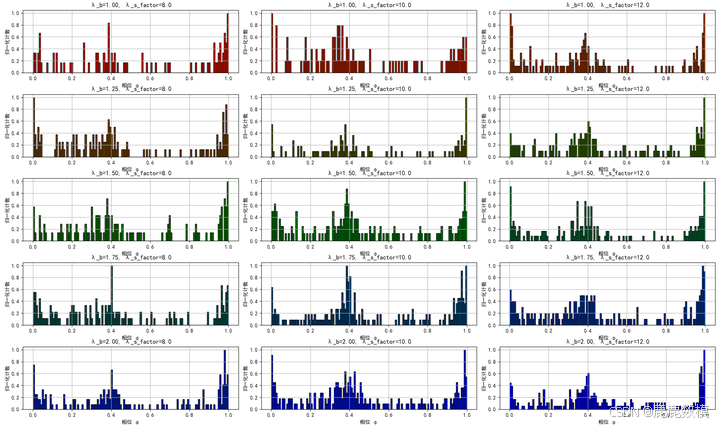
(b) 折叠出脉冲轮廓
利用仿真的光子序列,根据 Crab 脉冲星的自转参数,折叠出脉冲轮廓,要求相位区间为 [0,1]。
© 提高仿真精度的方法
在保持背景光子流量密度不变的情况下,提出一种提高仿真精度的方法,更好地展现脉冲星的辐射特性。
解题思路
- 建立光子序列模型
光子到达率函数:
λ(t)=λb+λsh(ϕ(t)) \lambda(t) = \lambda_b + \lambda_s h(\phi(t)) λ(t)=λb+λsh(ϕ(t))
λb\lambda_bλb:背景光子流量密度。
λs\lambda_sλs:脉冲星光子流量密度。
h(ϕ(t))h(\phi(t))h(ϕ(t)):归一化的脉冲轮廓函数,反映脉冲星在一个周期内不同相位的辐射强度。
ϕ(t)\phi(t)ϕ(t):脉冲星的相位,取值范围 [0,1]。
非齐次泊松过程:光子到达时间服从非齐次泊松分布,根据速率函数 λ(t)\lambda(t)λ(t) 生成光子到达时间序列。
- 仿真光子序列
计算总期望光子数:
Ntotal=...... N_{\text{total}} = ...... Ntotal=......
生成光子到达时间:
使用算法(如逆变换法或 Thinning 算法)模拟非齐次泊松过程,生成光子到达时间序列。
计算光子相位:
根据脉冲星的自转参数,计算每个光子的相位:
ϕ(t)=...... \phi(t) = ...... ϕ(t)=......
vvv 和 v˙\dot{v}v˙ 分别是脉冲星的自转频率和频率一阶导数。
- 折叠出脉冲轮廓
将光子相位映射到 [0,1] 区间,统计各相位区间内的光子数。
绘制相位与光子数的关系图,即折叠后的脉冲轮廓。
- 提高仿真精度的方法
…
…
关键难点分析
非齐次泊松过程的模拟
挑战:非齐次泊松过程的速率函数随时间变化,模拟复杂。
解决方案:使用 Thinning 算法,先生成均匀泊松过程,再根据速率函数筛选光子。
相位计算的精确性
挑战:脉冲星自转频率的高阶项和频率导数对相位的影响。
解决方案:根据具体需求,决定相位计算中包含的高阶项,以保证精度。
信噪比的提升
挑战:背景噪声较高,脉冲信号可能被淹没。
解决方案:通过延长观测时间、优化探测器等方法,提高脉冲信号的可检测性。
总结
通过建立和仿真脉冲星光子序列模型,我们深入理解了脉冲星信号的辐射过程和探测原理。提出的提高仿真精度的方法,为实际观测和数据分析提供了指导。
整体总结
在这次任务中,我们从建模、计算到仿真,全面探索了 X 射线脉冲星光子到达时间的相关问题。每个问题都涉及到复杂的物理和数学模型,需要我们:
深入理解物理原理:如脉冲星的自转、光子传播的时延因素等。
掌握数学建模技巧:建立精确的时间转换模型、光子序列模型等。
处理数据缺失和近似计算:在缺少部分数据的情况下,合理地做出假设,确保计算的合理性。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 29
29 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)