毕业设计:复杂背景下的闯红灯识别系统 目标检测
毕业设计:复杂背景下的闯红灯识别系统为计算机毕业设计提供了一个创新的方向,结合了深度学习和计算机视觉技术,为毕业生提供了一个有意义的研究课题。对于计算机专业、软件工程专业、人工智能专业、大数据专业的毕业生而言,提供了一个具有挑战性和创新性的研究课题。无论您对深度学习技术保持浓厚兴趣,还是希望探索机器学习、算法或人工智能的领域的同学,能为您提供灵感和指导。该系统利用先进的深度学习算法和计算机视觉技术
目录
前言
📅大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
🚀对毕设有任何疑问都可以问学长哦!
选题指导:
大家好,这里是海浪学长毕设专题,本次分享的课题是
🎯复杂背景下的闯红灯识别系统 目标检测
设计思路
一、课题背景与意义
随着城市化进程的加速和交通流量的增加,闯红灯现象日益严重,给交通安全和行人自身安全带来了巨大风险。闯红灯识别系统旨在通过结合深度学习和计算机视觉技术,能够在复杂的交通场景中准确识别出闯红灯的行为,从而提高交通管理的效率和行人的安全。可以为城市交通规划和交通管理部门提供科学的决策依据,减少交通事故的发生,保护行人的生命安全。
二、算法理论原理
2.1 基于特征线检测技术
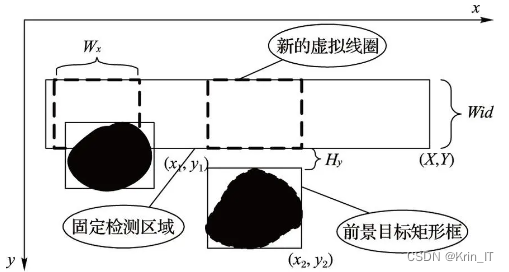
虚拟线圈检测技术是一种基于视频图像的实时检测方法,适用于对交通违章行为进行监测和识别。该技术通过在特定区域设置面积较小的虚拟线圈,在车辆经过时检测区域内像素的亮度、色度等信息的变化来判断是否有车辆违规行驶。相比于其他方法,虚拟线圈检测技术具有实现简单和检测速度快的优势,特别适用于背景复杂、运动目标较多的场景,如十字路口的交通违章事件检测。
基于快速匹配的虚拟线圈检测算法是一种在图像中设置虚拟线圈,并通过模块跟踪匹配来检测车辆违规行为的方法。该算法通过对前后连续两帧图像进行匹配,使用当前图像的某一宏块在下一帧范围内搜索最佳匹配,以判断是否有车辆越过停车线。在进行模块跟踪匹配之前,算法需要对虚拟块进行筛选,去掉多余的虚拟块,以提高匹配速度,并满足实时性要求。算法通过计算每两帧之间各个虚拟线圈块的平均运动矢量,得到它们的运动方向和大小,然后保留那些运动矢量与道路方向基本一致的虚拟线圈块。该算法使用平均绝对值来衡量前后两帧中两个小块的相似度,相似度越小表示两个小块相似度越高。当虚拟线圈中变化的小块数目大于设定阈值时,算法判定虚拟线圈区域产生变化。该算法的优点是运算速度相对较快,在连续两张图像上进行匹配,且对于指定条件下的图像大小,检测时间较短。然而,该算法对于阴影的干扰处理能力较差,需要对图像预先进行阴影去除处理。
2.2 运动目标跟踪
基于Snake模型的物体跟踪算法存在一些缺点,如要求外力可微、不稳定、控制参数难以确定和计算量大。为了改进这些问题,提出了多种改进的算法:
- 基于B-样条Snake模型的跟踪算法使用三次样条曲线准确表示每一帧图像中的目标轮廓,具有较快的收敛速度和稳定性。该算法通过计算相邻帧之间的差分图像,并利用双阈值分割方法检测图像中的运动物体,确定目标的粗略位置。然后将上一帧图像中得到的目标轮廓作为初始值,经过计算后可准确分割和跟踪运动目标。
- 基于GVF Snake的运动目标跟踪算法首先利用帧间差分得到不同时刻的灰度差异图像,然后利用形态学方法得到运动目标的粗略轮廓作为Snake的初始轮廓。最后,利用梯度矢量流主动轮廓模型的特性,能够准确地收敛到目标边界。该算法具有快速运算速度、准确跟踪目标和一定的抗噪能力。
- 基于运动补偿的Snake视频对象跟踪算法预先估计对象的运动信息,并对Snake曲线的初始轮廓位置进行运动补偿,从而解决了在对象移动幅度较大时容易陷入局部最小的问题。该算法能够快速收敛到目标轮廓,准确地跟踪目标,并具有一定的抗噪能力。
三、检测的实现
3.1 数据集
由于网络上没有现有的合适的数据集,我决定自己进行网络爬取,收集图片并制作了一个全新的数据集。该数据集包含了各种复杂背景下闯红灯的场景照片,其中包括不同地区、不同时间、不同天气条件下的行为。通过网络爬取,我能够捕捉到真实的场景和多样的环境,这将为我的研究提供更准确、可靠的数据。

为了增加数据的多样性和数量,我使用了数据扩充技术对自制数据集进行了增强。数据扩充包括图像旋转、缩放、翻转和添加噪声等操作,以模拟不同的拍摄角度、尺度和环境条件。通过数据扩充,我得到了更丰富的样本集,提高了系统对不同场景下闯红灯行为的识别能力。这种数据扩充方法使得我的研究更具有鲁棒性和泛化能力,为复杂背景下的闯红灯识别系统的设计和应用提供了更可靠的基础。
3.2 实验环境搭建
实验环境使用Windows操作系统,并利用Python作为主要的编程语言进行算法和模型的实现。使用PyTorch作为深度学习框架,构建和训练神经网络模型。借助Pandas等库,完成数据的加载、处理和转换。这样的实验环境提供了一个方便和高效的平台,用于开发和测试算法系统。
3.3 实验及结果分析
复杂背景下闯红灯识别系统的设计思路。系统综合应用了基于停车线特征的虚拟线圈检测算法、车辆尾部跟踪算法和越线车辆跟踪算法:
- 通过对停车线的遮挡判断实现对运动车辆的检测,并提出了背景更新的算法来降低阴影对检测的干扰。基于车辆尾部边缘信息丰富的特点,提出了车辆尾部跟踪算法,并结合虚拟线圈检测算法实现对车辆越线行为的检测,能够排除密集车辆和行人等干扰,确保检测的准确性。
- 根据十字路口的实际情况,将车辆速度作为闯红灯行为检测的条件之一,并提出了基于车辆尾部跟踪的车辆测速算法。
- 针对越线车辆的跟踪问题,提出了基于运动物体类型的跟踪算法,通过运动特征区分不同类型的运动物体,并针对性地对机动车辆进行跟踪,以提高检测的速度和准确性,并解决大车遮挡问题。
通过结合虚拟线圈检测、车辆尾部跟踪和越线车辆跟踪,该系统能够准确判断车辆闯红灯行为,并排除大车干扰、车辆密集干扰和行人干扰等问题,提高了系统检测的准确率。
相关代码示例:
import cv2
def vehicle_tail_tracking(frame, previous_bbox):
current_bbox = (x, y, w, h)
if previous_bbox is not None:
tracked_bbox = (x, y, w, h)
return tracked_bbox
else:
return current_bbox
def main():
video = cv2.VideoCapture('your_video.mp4')
previous_bbox = None
while video.isOpened():
ret, frame = video.read()
if not ret:
break
tracked_bbox = vehicle_tail_tracking(frame, previous_bbox)
x, y, w, h = tracked_bbox
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2)
cv2.imshow('Vehicle Tracking', frame)
previous_bbox = tracked_bbox
if cv2.waitKey(1) & 0xFF == ord('q'):
break
video.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
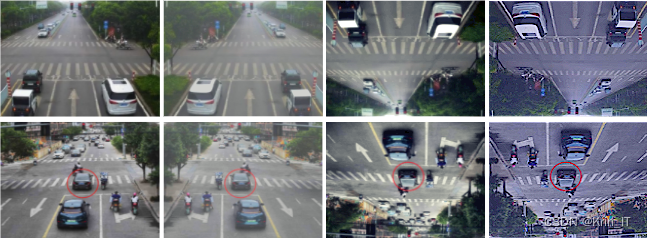
main()实现效果图样例:




创作不易,欢迎点赞、关注、收藏。
毕设帮助,疑难解答,欢迎打扰!
最后

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 23
23 0
0- 0



 已为社区贡献102条内容
已为社区贡献102条内容

所有评论(0)