论文导读 | 基于GPU的个性化PageRank实时计算
北京大学 葛钤编者按:原文《Realtime Top-k Personalized Pagerank over Large Graphs on GPUs》介绍了一篇在GPU对大规模图上进行个性化pagerank计算的论文。本篇论文的主要结构是先介绍了问题定义和已有的基于CPU的算法,并在此基础上完成了在GPU上的优化和改进。主要包括:提出了在GPU上更适合的数据存储结构。进行了适应性的前向随机游走

北京大学 葛钤
编者按:
原文《Realtime Top-k Personalized Pagerank over Large Graphs on GPUs》介绍了一篇在GPU对大规模图上进行个性化pagerank计算的论文。本篇论文的主要结构是先介绍了问题定义和已有的基于CPU的算法,并在此基础上完成了在GPU上的优化和改进。主要包括:
-
提出了在GPU上更适合的数据存储结构。
-
进行了适应性的前向随机游走。
-
并行地实现预处理和候选集的更新。

论文地址:
http://www.vldb.org/pvldb/vol13/p15-shi.pdf
(或点击文末“阅读原文”跳转)
1 Problem Definition
(1) Personalized PageRank:
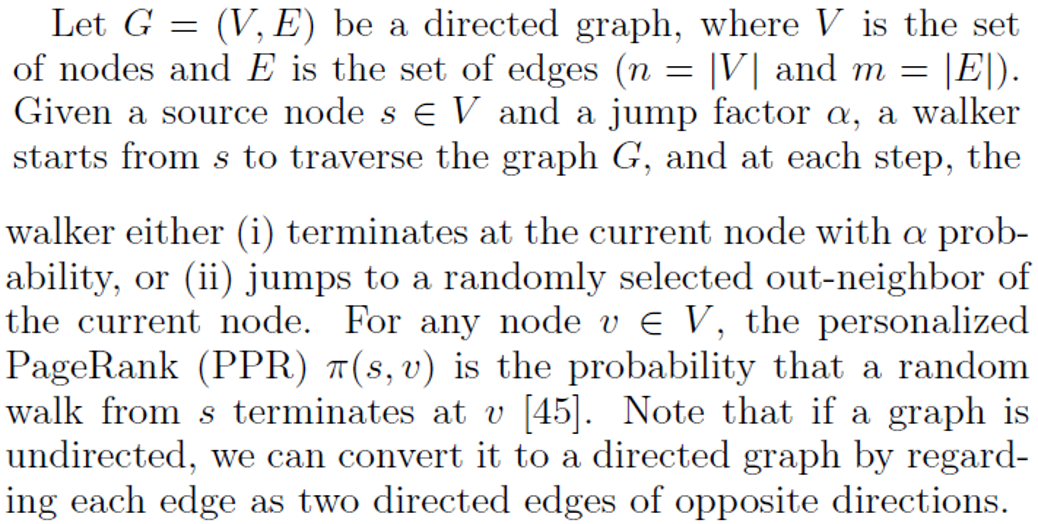
给定一个有向图G=(V,E),其中V和E分别是图的点集和边集,顶点数目为n,边数目为m,给定一个源点u以及一个停止概率α。从u出发的随机游走定义如下:每一步有α的概率停止,或者等概率跳到当前节点的每个出邻居。对于每个节点v,从u到v的个性化PageRank值π(s, v)定义为从s出发的随机游走到v点停止的概率。对于无向图,类似地可以将每条边视为两个方向的边一起构成。
(2)Approximate Top-k PPR Queries
Top-k 单源PPR是指从源点出发,到所有点的PPR中最大的k个,但是由于PPR本身难以精确计算,通常都采用上述的近似定义,即给定误差范围和阈值以及失败概率,(1)式保证当PPR真实值大于阈值时,始终有估计值和真实值的差在相对误差界内,(2)式保证了返回的点的值与真实的top-k的误差在限度内。
2 Existing CPU-based Methods
(1)Monte-Carlo:
从源点s出发,引出足够数量的随机游走,其中停在v点的比例就是s到v的ppr的无偏估计,经过足够多的采样就能够通过概率不等式保证误差在一定限度内。
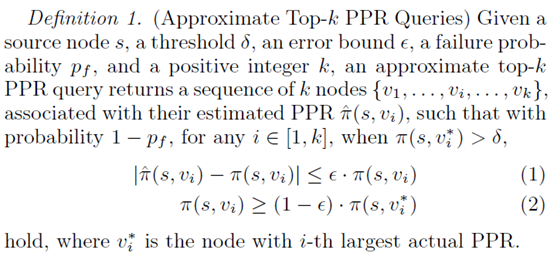
(2)Forward-Push:
如上述伪码所示,设置残差r,一开始s点残差为1,其余为0;之后当节点满足第9行的条件时,就放进待push的集合中,并不断地向外push。注意到开始时总残差之和r为1,每进行一次push,r都至少减少α*rmax,因此理论复杂度为O(1/rmax)。
(3)FORA:
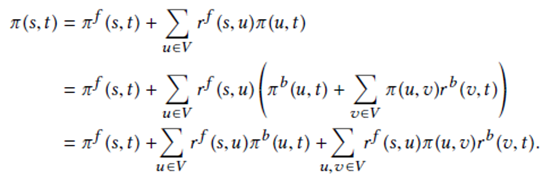
是将forward-push与Monte-Carlo方法相结合,先从起点s开始进行forward-push,当满足残差都小于一个阈值时,开始从剩余的点进行随机游走,并且利用下式进行估计,注意到用随机游走的部分会乘以当前残差,因此会减少总的误差,并通过设置阈值和随机游走数目来达到较精确的估计。

(4)TopPPR:
是由forward-push和backward-push以及Monte-Carlo方法相结合,利用下式进行估计,本质上类似于将(3)式再展开了一层。
3 Algorithm
(1)Adaptive Forward Push
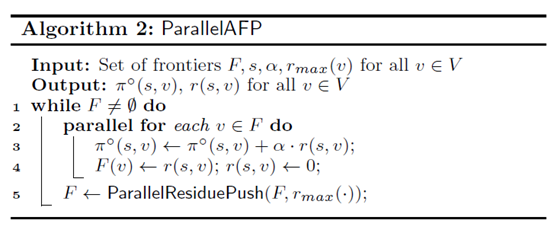
伪码如上,与之前的Forward-Push十分相似,本质上是通过为每个点u来设置不同的残差阈值rmax(u),类似地用frontier来表示r(s,u)/dout(u)大于rmax(u)的点。
如果照搬Forward-Push的做法,会导致frontier集合数目起初减少很快,后续减少得越来越慢,最末尾的大部分迭代,可能只有极少数的frontier来参与,这也就意味着表示其他点的线程出现了空闲浪费。因此文中的解决方法就是对于容易成为frontier的点设置更大的rmax,来避免一些后续不需要的迭代。
个性化rmax的思路是通过一种启发式的方法:文中认为一个节点是否容易成为frontier与pagerank(度量了每个点对于整个图的影响大小)有关,其中pagerank大的点可能更加容易聚集residue。因此预先计算出每个点的pagerank,按照pagerank/dout从大到小存储在PRO-rank list中。
具体的rmax设置如下图所示,其中β(u)与从u引出的随机游走的数目正相关,因为push的层数较少,因此需要更多的随机游走来保证其精确度。
![]()
(2)Inverted Random Walks
算法本身会涉及到从多个点出发引出随机游走,但是如果采用较常用的按照源点记录的方法,如果从u出发到达v的随机游走有多条,那么就会出现重复存储的情况。
为了更好地适应GPU的环境和避免重复记录,文中设计了下图所示的两层CSR结构的存储:
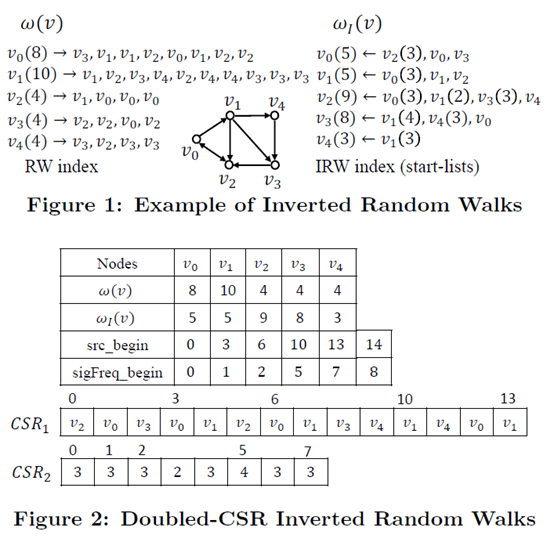
其中下标为v的IRW存储了以v作为终点的随机游走的信息,表格中五行自上而下依次表示节点名,节点作为起点的随机游走数,节点作为终点的随机游走数,在csr1中的下标,在csr2中的下标(这里只存储大于1的那些)
(3)Offline Indexing and Deciding rmax(v)
这一部分的思路是从每个点引出一定数目的随机游走来作为index存储在IRW结构中,并根据之前的Pro-rank list确定每个点的随机游走数目。
具体做法是:先从每个点引出w(v)条随机游走。考虑存储空间的限制,假设还有W的空余空间,按照Pro-rank list从大到小的顺序,预设a为2的幂次,每个点额外走(a-1)*w(v)的随机游走,直到消耗了当前剩余空间的一半,此时将a减半,再继续下去。当a为2时,耗尽所有预算。最后根据每个点a的大小按下图所示来计算β(v)和rmax(v)。


(4)Parallel Top-k PPR Processing
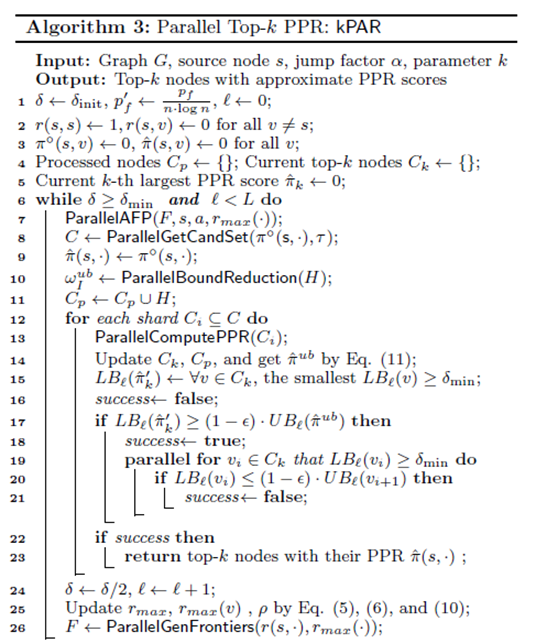
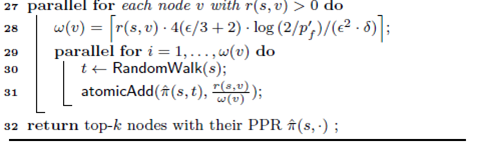
整个算法主体的伪代码如上所示,其中6-26行通过不断减少δ来尝试避免更多的随机游走,直接筛选出top-k的点,而27-31行则是在无法筛出后,后续用随机游走来算出更精确的PPR值,返回最大的k个。
(5)Parallel Candidate Set Generation
在进行候选集更新时,可以通过并行来减少时间复杂度。对应上图伪码第8行,在进行完ParallelAFP之后,即每个点的r(s,u)/dout(u)不大于rmax(u)后,每个点对应地有一个ppr估计值π(s,u),这里是初步筛选,把估计值不小于δ的点留下。具体做法有两种:
设置flag,对于每一个点,在AFP过程中大于δ就标记1,最后再遍历统计所有大于1的点。或者维护一个Candidate数组,一旦大于δ就放进数组里,维护一个下标。
实际应用时,当候选集数目较小时,采用第二种做法,否则采用第一种。
(6)Set PPR Bounds
结合前面推导得出,当AFP进行完之后,对于任意点u,从任一点出发的随机游走在u停止对于u点ppr影响不超过ρ,其中 
因此给出每个点ppr的上界π ̂^ub:

而对于所有不属于候选集的点,ppr上界为

其中  而对于在目前top-k集合中的点v,上下界表示如下:
而对于在目前top-k集合中的点v,上下界表示如下: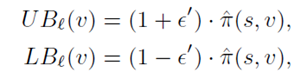
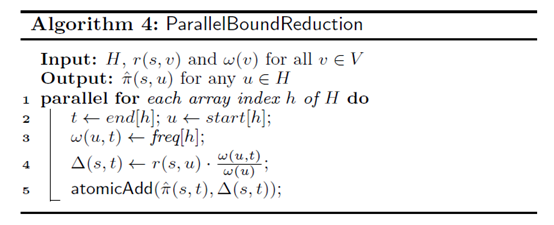
(7)Bound Reduction in Parallel
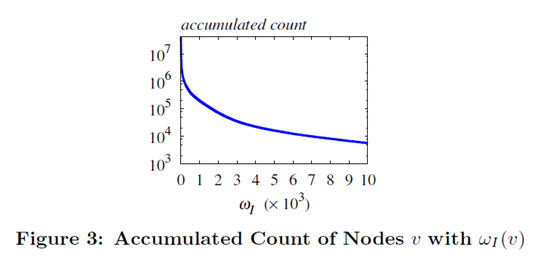
仍然存在这样的问题:w_I (v)可能会很大,导致上下界不够紧。文中的解决方法是将w_I (v)很大的点v摘出来,单独进行更精确的估计(见下图算法)。
且根据经验得知点的的数目与w_I (v)的分布如下图所示,因此这样的点不会很多。
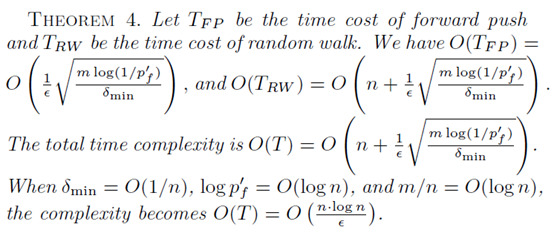
(8)Complexities
其中forward-push和随机游走所需的时间和空间复杂度如下图所示:
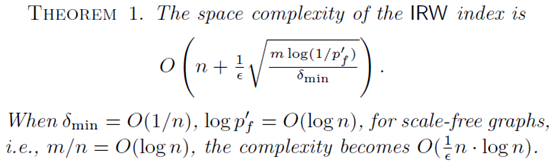
而其中用到的数据结构的空间复杂度分析如下:
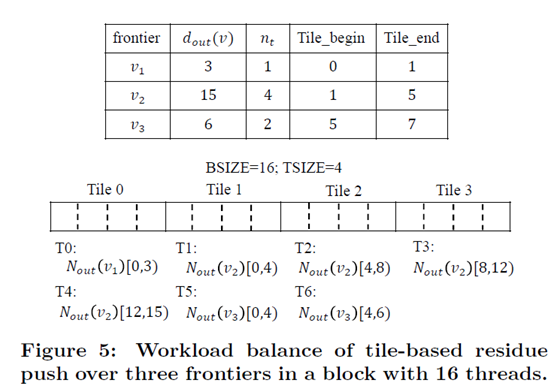
(9)Parallel Optimizations
对于线程按照每个点的出度进行了合适的分配,按照每个Tile完成相应一部分邻居的工作。
4 Experiment
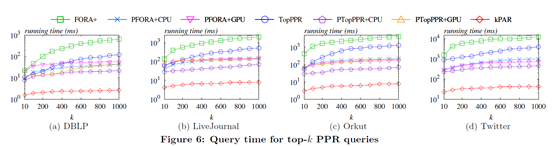
(1)Query time:
文中将提出的算法(kPAR)与常见的top-k ppr的算法FORA,TopPPR等进行了对比,可以看出kPAR在查询速度上有着非常明显的提升
(2)Query Accuracy
在查询的精确度上有两种设置,分别是Precision:比较了返回的点集中的点在实际top-k点集中的占比。和Normalized Discounted Cumulative Gain(NDCG):计算方法如下,进一步对于顺序的正确性进行区分。

在这样的两个精度标准下,将文中的kPAR算法与其他算法进行比较,结果如下:
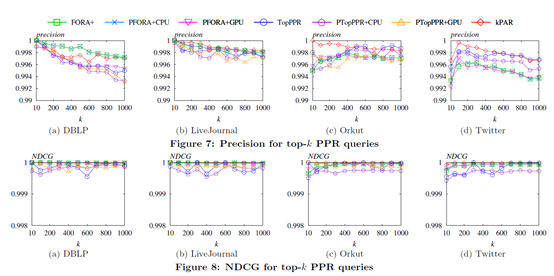
可以看出,文中提出的kPAR算法始终有着很高的精确度。
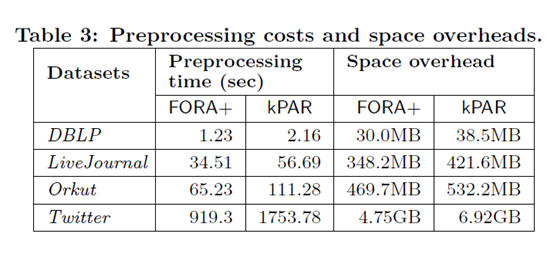
(3)Preprocessing Time and Space Overhead
在预处理时间和总的存储开销上来看,由于kPAR为了更好地减少online算法的时间,选取了一部分点进行更多随机游走,但是整整体上与FORA+算法的开销相近。
5 总结
本文介绍了如何在GPU上解决大规模图上的单源top-kPPR查询问题,是对CPU上的FORA算法进行的一系列调整与改进,使得算法能够更好地契合GPU的性质,最终在保证高精确度的同时,对于时间复杂度有着数量级的缩减。对于后续PPR的研究以及在GPU上进行拓展有着很强的参考意义和启发价值。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 2
2 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)