八自由度 四足机器人运动学正解及逆解(附代码)
·
一.运动学正解
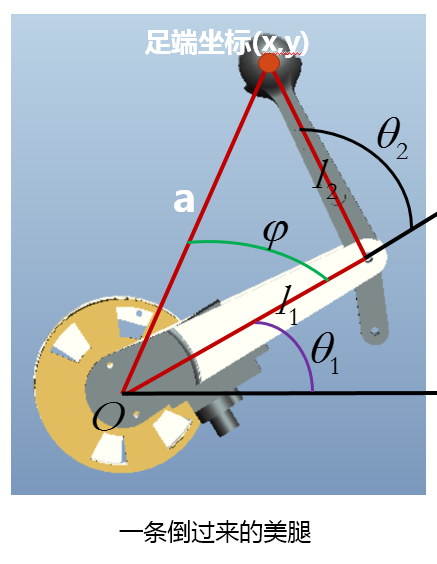
-
已知两个关节的角度(
和
),以及连杆长度,求足端的位置坐标
。
步骤分解:
-
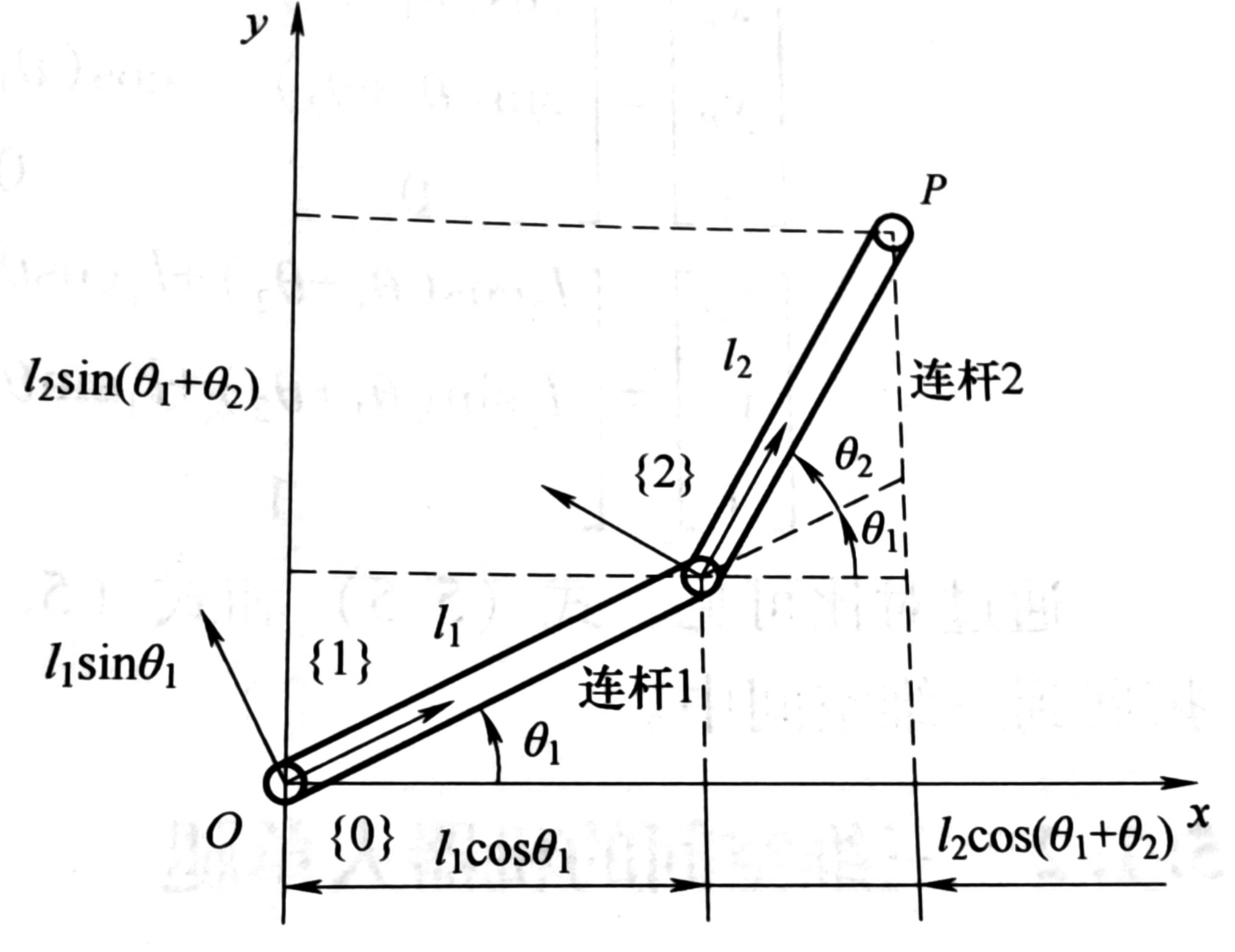
建立坐标系:以髋关节为原点,向上为
轴正方向,向右为
轴正方向。
-
-
大腿的位置:
-
大腿长度为
,髋关节角度为
,逆时针为正。
-
大腿末端(膝关节)的坐标:
-
-
小腿的位置:
-
小腿长度为
,膝关节角度为
(相对于大腿的旋转角度)。
-
脚底的坐标(相对于膝关节):
-
-
-
脚底总坐标:
-
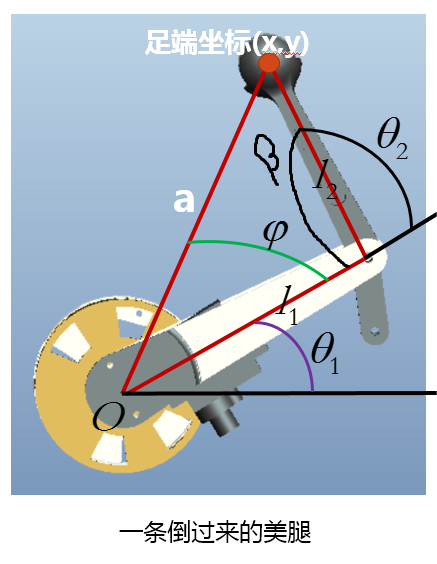
正解就是已知关节角度,算末端的位置,知道你的大腿和小腿弯了多少度,计算脚能伸到哪里。
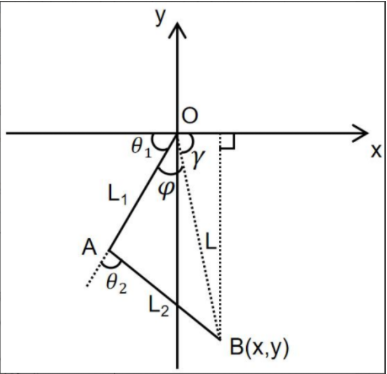
二、逆运动学(Inverse Kinematics)
-
问题:已知足端的目标位置(x, y)和大小腿长度,求两个关节的角度(
)
-
求膝关节角度θ2:
-
勾股定理:计算从髋关节到脚底的距离:
-
设x,y坐标已知,从足端坐标B到原点O 做一条线,设为
(图2中的L),根据勾股定理可得:
或者
-
如果
(两杆之和小于a)或
(两杆差值大于a),则目标位置不可达,也就是说逆解存在的必要条件为:
。
-
-
-
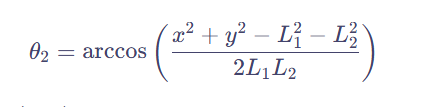
余弦定理:求膝关节角度 θ₂:
- 将
代入式:
- 移项并代入勾股定理解出:

- 最后求出:
-
求髋关节角度 θ1:
-
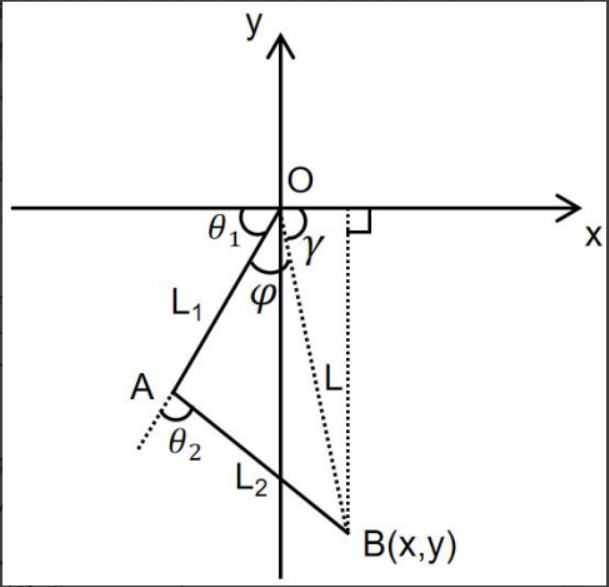
- 余弦定理,已知三角形的三条边长,可以使用反余弦函数求解三角形中某个角。
-
- 反正切求得:
- 当x>0时:
- 当x<0时:
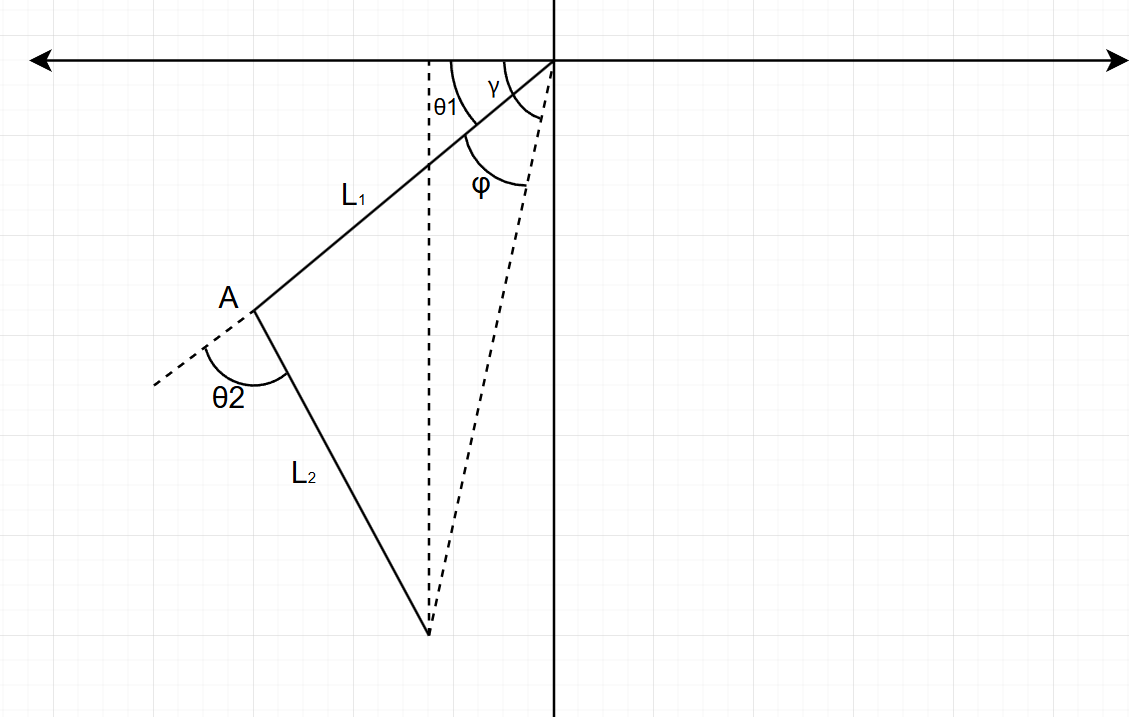
- 当x=0时:
(自己画图理解下~)
三、摆线运动曲线
一个圆在直线上做纯滚动,圆上边界固定一点 所绘的轨迹,叫摆线。
设圆心半径为,点
初始位置为圆的正上方,设圆转过的角度
或
,则圆心水平位移距离为
。
机器人足端摆线方程为: 步长 =足端起点-足端终点
,抬腿高度
。
摆动相周期内 从0~
,
,
,faai为摆动相占整个周期
的比例
支撑相时 则为,y高度始终不变为0
四、代码实现
4.1 运动学逆解
/*默认速度 步长 设置*/
float l1 = 200; //大腿长(mm)
float l2 = 160; //小腿长(mm)
float h = 30; //抬腿高度 设置
float xf = 40; //xf为终点足端坐标
float xs = -20; // xs起始足端坐标
float Ts = 1; //周期
float faai = 0.5; //占空比
float speed = 0.025; //步频调节
//=============一些中间变量=============
float t = 0;//时间变量
float init_x = 0;
float init_y = -290;//腿高度
float x1 = init_x;//腿1x坐标
float y1 = init_y;//腿1y坐标
float x2 = init_x;
float y2 = init_y;
float x3 = init_x;
float y3 = init_y;
float x4 = init_x;
float y4 = init_y;
float ges_x_1 = 0;
float ges_x_2 = 0;
float ges_x_3 = 0;
float ges_x_4 = 0;
float ges_y_1 = init_y;
float ges_y_2 = init_y;
float ges_y_3 = init_y;
float ges_y_4 = init_y;
void calculateLegAngles(float x, float y, float* hip_angle, float* knee_angle) {
x = -x;
//求解θ2
*knee_angle = acos((x * x + y * y - l1 * l1 - l2 * l2) / (2 * l1 * l2));
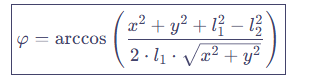
求解φ
float fai = acos((l1 * l1 + x * x + y * y - l2 * l2) / (2 * l1 * sqrt(x * x + y * y)));
求解θ1
if (x > 0) {
*hip_angle = abs(atan(y / x)) - fai;
} else if (x < 0) {
*hip_angle = pi - abs(atan(y / x)) - fai;
} else {
*hip_angle = pi - 1.5707 - fai;
}
//转为角度
*knee_angle = 180 * *knee_angle / pi;
*hip_angle = 180 * *hip_angle / pi;
}
void IK(float x1, float y1, float x2, float y2, float x3, float y3, float x4, float y4) {
float hip_angle1, knee_angle1;
float hip_angle2, knee_angle2;
float hip_angle3, knee_angle3;
float hip_angle4, knee_angle4;
calculateLegAngles(x1, y1, &hip_angle1, &knee_angle1);
calculateLegAngles(x2, y2, &hip_angle2, &knee_angle2);
calculateLegAngles(x3, y3, &hip_angle3, &knee_angle3);
calculateLegAngles(x4, y4, &hip_angle4, &knee_angle4);
angle_output(hip_angle1, knee_angle1, hip_angle2, knee_angle2,
hip_angle3, knee_angle3, hip_angle4, knee_angle4);
}4.2 步态生成代码
//默认高度参数
#define BASE_HEIGHT 280
#define HEIGHT_MIN 170
#define HEIGHT_MAX 330
#define X_ZERO 50
/*默认速度 步长 设置*/
float l1 = 200; //大腿长(mm)
float l2 = 160; //小腿长(mm)
float h = 30; //抬腿高度 设置
float xf = 40; //xf为终点足端坐标
float xs = -20; // xs起始足端坐标
float Ts = 1; //周期
float faai = 0.5; //占空比
float speed = 0.025; //步频调节
void GaitGenerator::trot(float t, float direction, four_leg::LegAngles& leg_angles,
StableHeight& stable_adjust) {
// 根据方向设置步态参数
float xf = (direction > 0) ? 30.0f : 20.0f;//终点坐标
float xs = (direction > 0) ? 10.0f : -20.0f;//起点坐标
int sign = (direction > 0) ? 1 : -1;
float sigma, zep, xep_b, xep_z = 0;
if (t < config_.Ts * config_.faai) {
sigma = 2 * M_PI * t / (config_.faai * config_.Ts);
zep = config_.h * (1 - cos(sigma)) / 2;
xep_b = (xf - xs) * ((sigma - sin(sigma)) / (2 * M_PI)) + xs;
xep_z = (xs - xf) * ((sigma - sin(sigma)) / (2 * M_PI)) + xf;
// 左前腿
LeftFront.y = BASE_HEIGHT - zep ;
// 右前腿
RightFront.y = BASE_HEIGHT;
// 右后腿
RightBack.y = BASE_HEIGHT- zep;
// 左后腿
LeftBack.y = BASE_HEIGHT ;
// X坐标设置
LeftFront.x = -xep_z * sign + X_ZERO;
RightFront.x = -xep_b * sign + X_ZERO;
RightBack.x = -xep_z * sign - X_ZERO;
LeftBack.x = -xep_b * sign - X_ZERO;
}
else if (t >= config_.Ts * config_.faai && t < config_.Ts) {
sigma = 2 * M_PI * (t - config_.Ts * config_.faai) / (config_.faai * config_.Ts);
zep = config_.h * (1 - cos(sigma)) / 2;
xep_b = (xf - xs) * ((sigma - sin(sigma)) / (2 * M_PI)) + xs;
xep_z = (xs - xf) * ((sigma - sin(sigma)) / (2 * M_PI)) + xf;
// 左前腿
LeftFront.y = BASE_HEIGHT;
// 右前腿
RightFront.y = BASE_HEIGHT - zep;
// 右后腿
RightBack.y = BASE_HEIGHT;
// 左后腿
LeftBack.y = BASE_HEIGHT - zep;
// X坐标设置
LeftFront.x = -xep_b * sign + X_ZERO; //sign为前进后退标志位
RightFront.x = -xep_z * sign + X_ZERO;
RightBack.x = -xep_b * sign - X_ZERO;
LeftBack.x = -xep_z * sign - X_ZERO;
}
// 计算逆运动学
kinematics_.IK(
LeftFront.x, LeftFront.y,
RightFront.x, RightFront.y,
RightBack.x, RightBack.y,
LeftBack.x, LeftBack.y,
leg_angles
);
}4.3 MATLAB单腿运动可视化
% 设置参数
L = 200; % 腿的长度
Ls =160; %小腿长度
Tmax = 100; % 动画帧数
theta_range = linspace(0, 2*pi,Tmax); % 角度范围
theta_s_range= linspace(0, 2*pi,Tmax); % 角度范围
Ts=2;
fai=0.5;
% xs=-35;
% xf=65;
xs2=40;
xf2=-10;
h=50;
zs=-290;
% 创建图形窗口
figure;
set(gcf, 'Position', [100, 100, 1000, 800]); % 增大窗口尺寸以便显示更多信息
for t= 0:0.04:5
t_mod = mod(t, 1); % 取模,使 t 在 0 到 1 之间循环
if t_mod<Ts*fai
sigma=2*pi*t_mod/fai/Ts;
zep2=h*(1-cos(sigma))/2+zs;
xep3=(xf2-xs2)*(sigma-sin(sigma))/(2*pi)+xs2;
xep4=(xs2-xf2)*(sigma-sin(sigma))/(2*pi)+xf2;
y3=zep2;
y4=zs;
end
if t_mod>Ts*fai && t_mod<Ts
sigma=2*pi*(t_mod-(Ts*fai))/fai/Ts;
zep2=h*(1-cos(sigma))/2+zs;
xep3=(xs2-xf2)*(sigma-sin(sigma))/(2*pi)+xf2;
xep4=(xf2-xs2)*(sigma-sin(sigma))/(2*pi)+xs2;
y3=zs;
y4=zep2;
end
%plot([0, xep], [0, y], 'bo-', 'LineWidth', 2)
%求φ角度
fail3= acos((xep3.^2 + y3.^2 + L.^2 - Ls.^2) /(2 *L*sqrt(xep3.^2+y3.^2)));
fail4= acos((xep4.^2 + y4.^2 + L.^2 - Ls.^2) /(2 *L*sqrt(xep4.^2+y4.^2)));
if xep3>0
sita3=abs(atan(y3/xep3))-fail3;
end
if xep3 <0
sita3=pi-abs(atan(y3/xep3))-fail3;
end
if xep3==0
sita3=pi-1.5707-fail3;
end
if xep4>0
sita4=abs(atan(y4/xep4))-fail4;
end
if xep4 <0
sita4=pi-abs(atan(y4/xep4))-fail4;
end
if xep4==0
sita4=pi-1.5707-fail4;
end
%求θ2
knee_angle3 = acos((xep3.^2 + y3.^2 - L.^2 - Ls.^2) /(2 *L*Ls));
knee_angle4 = acos((xep4.^2 + y4.^2 - L.^2 - Ls.^2) /(2 *L*Ls));
Lx3=L*cos(sita3);
Ly3=L*sin(-sita3);
Lx4=L*cos(sita4);
Ly4=L*sin(-sita4);
clf; % 清空当前图形
hold on;
plot([0, Lx3], [0, Ly3], 'bo-', 'LineWidth', 20)
plot([Lx3,xep3],[Ly3,y3],'ro-','LineWidth',15);
plot([0, Lx4], [0, Ly4], 'bo-', 'LineWidth', 20)
plot([Lx4,xep4],[Ly4,y4],'ro-','LineWidth',15);
center3=[xep3,y3];
center4=[xep4,y4];
viscircles(center3, 40, 'Color', 'g', 'LineWidth', 2);
viscircles(center4, 40, 'Color', 'g', 'LineWidth', 2);
% ================ 新增内容:显示角度和坐标信息 ================
% 转换角度为度数
sita3_deg = rad2deg(sita3);
sita4_deg = rad2deg(sita4);
fail3_deg = rad2deg(knee_angle3);
fail4_deg = rad2deg(knee_angle4);
% 在关节位置显示角度信息
text(0, -20, sprintf('大腿角度: %.1f°', sita3_deg), 'Color', 'b', 'FontSize', 12);
text(0, -40, sprintf('大腿角度: %.1f°', sita4_deg), 'Color', 'b', 'FontSize', 12);
text(Lx3, Ly3+30, sprintf('小腿角度: %.1f°', fail3_deg), 'Color', 'r', 'FontSize', 12);
text(Lx4, Ly4+30, sprintf('小腿角度: %.1f°', fail4_deg), 'Color', 'r', 'FontSize', 12);
% 在足端显示坐标信息
text(center3(1)+20, center3(2)+20, sprintf('足端: (%.1f, %.1f)', center3(1), center3(2)), 'Color', 'k', 'FontSize', 12);
text(center4(1)+20, center4(2)+20, sprintf('足端: (%.1f, %.1f)', center4(1), center4(2)), 'Color', 'k', 'FontSize', 12);
% 在顶部显示时间信息
text(50, 0, sprintf('时间: %.2f s', t), 'Color', 'm', 'FontSize', 14, 'FontWeight', 'bold');
% 添加图例说明
legend({'大腿', '小腿', '足端'}, 'Location', 'southeast');
% ========================================================
% 添加标签和标题
axis([-100, 300, -440, 20]);
xlabel('X轴');
ylabel('Z轴');
title('四足机器人腿部运动动画');
axis equal;
% 暂停一小段时间,以便观察动画效果
pause(0.01);
end
DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 20
20 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)