焊接机器人的设计
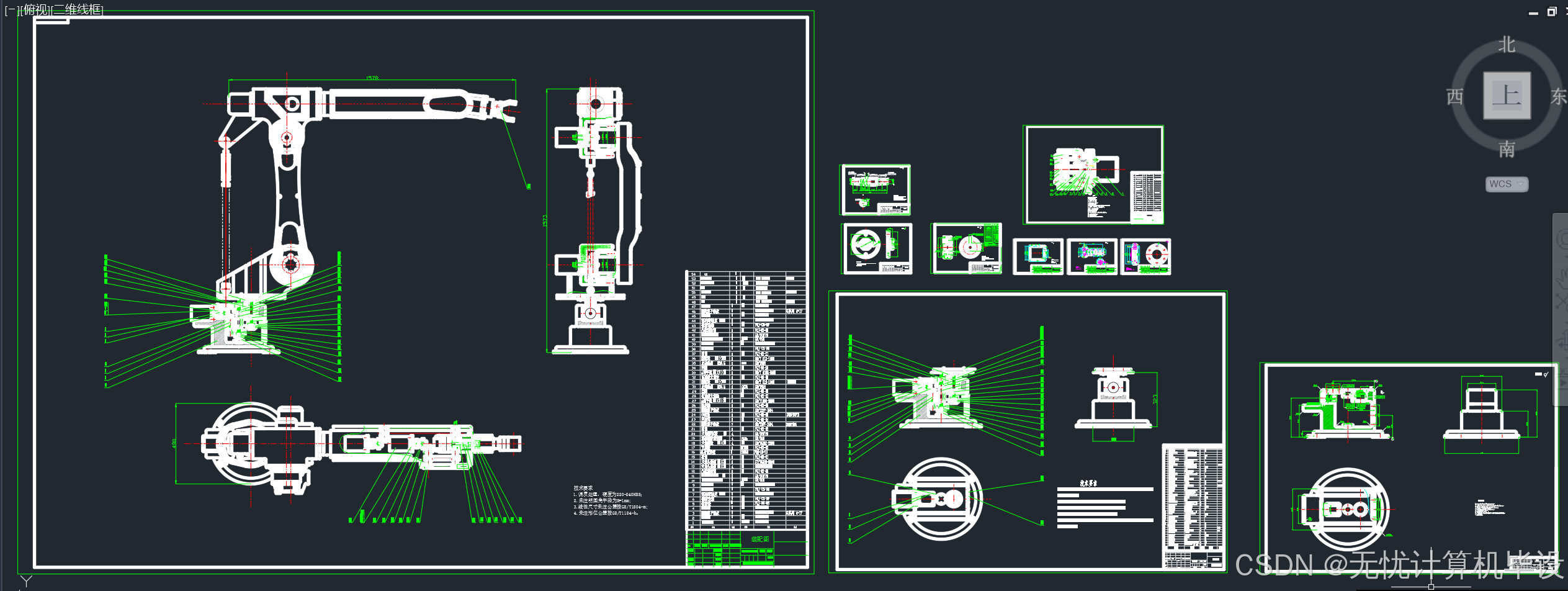
本次设计对一种应用在汽车焊接生产线上进行电弧焊接的五自由度焊接机器人结构进行设计计算,并完成总装配图和零件图CAD的绘制。本次设计针对焊接机器人焊接的周围环境,并完成详细的力学分析。计算各关节所需转矩和功率,并对各电机、减速器等的选型。其次根据电机和减速器的连接和固定衍生设计,设计关节结构,并完成焊接机器人整体的结构设计。焊接机器人是工业机器人研究领域的热点也是重点。针对焊接机器人的设计一定联系机
·
焊接型机器人可以说是现在工业生产制造中一种必不可少的机电一体化产品。焊接机器人是工业机器人研究领域的热点也是重点。针对焊接机器人的设计一定联系机械、电子、信息论、人工智能、生物学以及计算机等多门学科知识,因为焊接机器人快速发展也促使了上类学科的发展。
本次设计对一种应用在汽车焊接生产线上进行电弧焊接的五自由度焊接机器人结构进行设计计算,并完成总装配图和零件图CAD的绘制。本次设计针对焊接机器人焊接的周围环境,并完成详细的力学分析。计算各关节所需转矩和功率,并对各电机、减速器等的选型。其次根据电机和减速器的连接和固定衍生设计,设计关节结构,并完成焊接机器人整体的结构设计。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 9
9 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)